Данная обзорная статья представляет собой подробный обзор сигнализации на гироскопе-акселерометре Arduino. Систематически описаны возможности, принципы подключения, программирование, тестирование и настройка использованных модулей. Также рассматривается процесс отладки сигнализации для обеспечения корректности ее работы. Проводится анализ областей применения разработанной системы и сферы деятельности человека для прикладного применения проекта.
Ключевые слова: сигнализация, автоматизация, гироскоп, акселерометр, Arduino, антикражная система, мониторинг, робототехника, датчик безопасности, датчик движения.
Сигнализация играет важную роль в обеспечении безопасности и защите имущества. Одним из инновационных способов создания сигнализации является использование гироскопов и акселерометров Arduino. Гироскопы и акселерометры — это электронные компоненты, способные измерять ориентацию и ускорение движения. Arduino — это платформа с открытым исходным кодом, предоставляющая гироскопы и акселерометры, а также возможности программирования. Одновременно с проведением теоретических исследований был разработан проект, в основу которого лёг МК ArduinoNano, модуль гироскопа-акселерометра и звуковой элемент. Фотография промежуточного этапа моделирования приведена на рисунке 1:
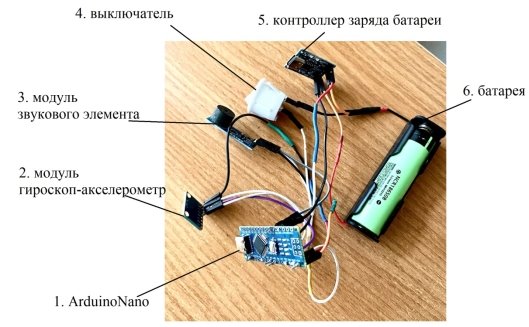
Рис. 1. Сигнализация на МК Arduino с применением модуля гироскопа-акселерометра
Список компонентов используемых в проекте с их кратким описанием приведён в таблице 1.
Таблица 1
Комплектующие компоненты проекта
|
Компонент |
Описание |
|
полнофункциональное миниатюрное устройство на базе микроконтроллера ATmega328 |
|
3-х осевой гироскоп и акселерометр GY-521 (MPU 6050) |
|
Пьезопищалка — используется для звукового оповещения. |
|
Выключатель клавишный “Micro” круглый 250В 3А черный |
|
TP4056 — зарядное устройство для li-ion аккумуляторов, 1А |
|
Аккумулятор 18650 — представляет собой li-ion-элемент, для питания портативной электроники |
|
Набор проводов для подключения датчиков и модулей |
Суть проекта заключается в формировании последовательных звуковых импульсов при внесении внешнего возмущения относительно модуля гироскопа-акселерометра.
Далее подробно рассмотрены необходимые аспекты по формированию проекта и информация, которая может быть полезной для повторения и усовершенствования проекта.
Гироскопы и акселерометры Arduino позволяют измерять ориентацию и ускорение объекта. Они основаны на принципах инерциальной навигации и могут быть использованы для различных приложений, включая сигнализацию. Для Arduino доступны различные модели гироскопов и акселерометров: модель X-гироскопа, модель Y-акселерометра, модель Z-гироскопа-акселерометра [1]. Это лишь некоторые из доступных моделей гироскопов и акселерометров Arduino. Выбор модели зависит от конкретных потребностей и задач сигнализации.
Для выполнения проекта необходимо следовать некоторым шагам. К ключевым шагам можно отнести следующие пункты:
- Определение пинов . Первым шагом является определение пинов Arduino, которые будут использованы для подключения гироскопа и акселерометра. В данном случае рекомендуется использование цифровых пинов входа-выхода.
- Подключение питания . Необходимо убедиться, что модуль гироскопа-акселерометра получает на вход необходимое питание.
- Проведение “прошивки” МК . После подключения компонентов необходимо направить скомпилированный программный код в Arduino, чтобы получить данные с гироскопа и акселерометра.
- Тестирование и отладка. После загрузки кода на Arduino и подключения необходимой периферии можно провести тестирование. На этом этапе необходимо убедиться, что данные правильно считываются и интерпретируются.
Важно учесть, что точный процесс подключения может различаться в зависимости от используемой модели датчика, а также от самой платы Arduino, которую вы используете. Поэтому важно обращаться к документации и руководству пользователя для каждого компонента и платформы Arduino [1].
После успешного подключения гироскопа и акселерометра к Arduino необходимо написать программный код сигнализации. Вот некоторые основные шаги, которые могут быть включены в программирование сигнализации на Arduino:
- Инициализация . Необходимо промести инициализацию периферии в программном коде. Используются соответствующие библиотеки и функции, чтобы настроить соединение с компонентами и установить необходимые параметры.
- Считывание данных. Программа должна периодически считывать данные с гироскопа и акселерометра, для этого используются функции чтения, поставляемые с библиотеками периферии, для получения текущих значений ориентации и ускорения.
- Обработка данных . Полученные данные могут быть обработаны для определения определенных событий или условий, указывающих на активацию сигнализации.
- Проработка логики программы и подбор алгоритма : Определите логику работы сигнализации, включая условия активации и деактивации, время задержки и другие параметры. Это позволит настроить сигнализацию согласно конкретным требованиям и ситуациям.
- Тестирование и отладка. После написания программного кода проведите тестирование сигнализации на Arduino, чтобы убедиться, что она работает правильно.
Программирование сигнализации на Arduino требует хорошего понимания языка программирования Arduino для работы с соответствующими библиотеками периферии [2]. После написания программного кода для сигнализации на гироскопе-акселерометре Arduino, необходимо приступить к тестированию и настройке системы.
Необходимо, выполнить калибровку гироскопа и акселерометра для достижения наилучшей точности измерений. В проекте используются алгоритмы усреднения значений для уменьшения влияния случайных колебаний [3].
Далее необходимо настроить параметры сигнализации, такие как уровни чувствительности, время задержки, длительность, что поможет адаптировать сигнализацию под конкретные требования и условия.
Если в процессе тестирования возникают проблемы или ошибки, используйте механизмы отладки Arduino, такие как вывод отладочной информации, через последовательный порт, чтобы идентифицировать и исправить проблемы в программном коде.
Сигнализация на гироскопе-акселерометре Arduino имеет широкий спектр применений и возможностей. Сигнализация может быть использована в качестве антикражной системы для защиты ценных предметов или устройств. При обнаружении аномального перемещения или вибрации система активирует сигнал тревоги, предупреждая о возможной попытке кражи. Также можно создать сигнализацию для автомобиля, которая будет реагировать на движение или попытки вскрытия.
Элементы подобной сигнализации могут быть использованы в различных системах мониторинга и контроля. Например, в медицинских устройствах она может обнаруживать падения или изменения положения пациента и автоматически предупреждать о происшествии медицинский персонал.
Гироскопы и акселерометры Arduino могут быть использованы для отслеживания движения пользователя в виртуальной или дополненной реальности. Это позволяет создать более реалистичный и интуитивный пользовательский опыт.
Сигнализация может быть применена в спортивных приложениях, например, для отслеживания движений во время тренировок или контроля позиции и ориентации во время спортивных мероприятий.
Существует широкий спектр задач по применению подобной технологии, она обеспечивает возможность создания интеллектуальных систем, реагирующих на физические параметры движения и ориентации [4].
Сигнализация на гироскопе-акселерометре Arduino представляет собой мощный инструмент для создания умных и интерактивных систем, основанных на измерении движения и ориентации. В этой обзорной статье мы рассмотрели основные аспекты сигнализации на гироскопе-акселерометре Arduino, начиная с обзора доступных моделей гироскопов и акселерометров, до подключения к Arduino, программирования, тестирования, настройки и применения. Также был рассмотрен пример готового проекта на модулях линейки МК Arduino.
Литература:
- Сомов А. С., Лыжин И. Г. Методическое пособие «Разработка умных устройств на базе Arduino» / Сомов А. С., Лыжин И. Г. — М: Сколковский институт науки и технологий, 2020. — 80 с.
- Росляков, А. В. Интернет вещей: учебное пособие [текст] / А. В. Росляков, С. В. Ваняшин, А. Ю. Гребешков. — Самара: ПГУТИ, 2015. — 200 с.
- Шерстобитова А. С. Датчики физических величин. — СПб: Университет ИТМО, 2017. — 57 с.
- Иванов И. И., Соловьев Г. И., Фролов В. Я. “Электротехника и основы электроники: учебник для вузов” Издательство «Лань» 2021. — 736 c.

