Доплеровская фильтрация сигналов является одной из ключевых операций решаемых устройств приема и обработки радиолокационных сигналов, от правильного выбора параметров которой зависит обеспечение требуемых вероятностных характеристик обнаружения целей.
Доплеровская фильтрация решает следующие задачи:
1) Оценка скорости цели желательно однозначная
2) Повышение качественных характеристик РЛС за счет когерентного накопления узкополосных фильтров
3) Подавление пассивных помех
Самая распространенный способ доплеровской фильтрации — это непосредственное дискретное преобразование Фурье (ДПФ) [3, с. 63]. ДПФ конечной последовательности
где аргумент функции
Но также существует быстрое преобразование Фурье (БПФ) [3, с. 145]. Один из классических вариантов — это алгоритм БПФ с прореживанием во времени. Прореживание по времени заключается в разделении исходной последовательности





Ниже на рисунке 1 представлено как выглядит прореживание по времени для

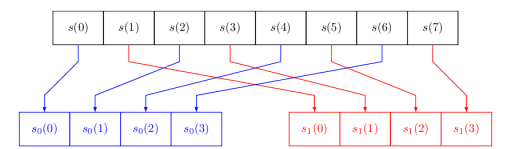
Рис. 1. Прореживание по времени для
Выражения




Рисунок 2 иллюстрирует процесс объединения двух ДПФ
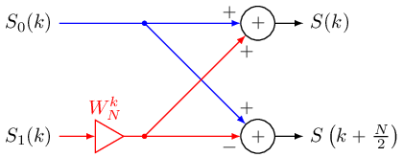
Рис. 1. Граф «бабочка» для БПФ с прореживанием по времени
Также существуют эффективные алгоритмы вычисления ДПФ составной длины. Алгоритм Винограда является одним из таких эффективных алгоритмов доплеровской фильтрации сигналов, который позволяет существенно до 80 % сократить число операций по сравнению с тем же алгоритмом Кули — Тьюки по основанию 2. Но этот алгоритм чрезвычайно сложный из — за своей исключительно нерегулярной структуры вычислений, из — за чего его довольно редко применяют на практике. Обычно на практике применяют его облегченный аналог вычисления БПФ — это алгоритм Гуда — Томаса [1, с. 141].
Алгоритм Гуда — Томаса это есть способ, с помощью которого отображают линейную последовательность из целых чисел в двумерную таблицу преобразующего одномерное преобразование Фурье в двумерное преобразование Фурье. Но сама последовательность должна состоять из взаимно простых чисел. На основе китайской теоремы об остатках определяется способ, с помощью которого переупорядочивается входная и выходная последовательность.
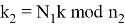
Перестановки входных индексов следует определять по следующему правилу:


Перестановки выходных индексов следует определять по следующему правилу:

Выражение для вычисления преобразования Фурье имеет вид:
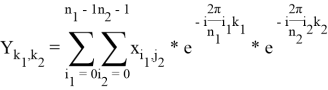
в котором задаются


Проиллюстрируем зависимость числа операций от различной реализации алгоритма БПФ на рисунке 3.
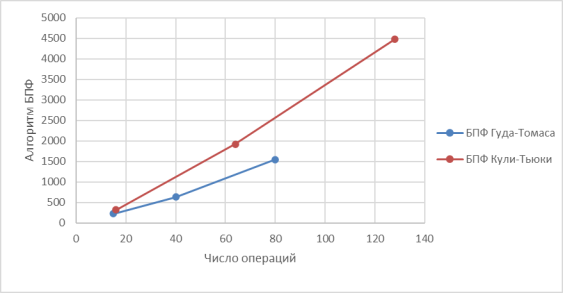
Рис. 3. Зависимость числа операций от вариации алгоритма БПФ.
Литература:
- Блейхут Р. Быстрые алгоритмы цифровой обработки сигналов: Пер. с англ. — М.: Мир, 1989. — 448 с., ил.
- Сколник М. Справочник по радиолокации: Пер. с англ. под общей ред. К. Н. Трофимова. Том 1.
- Лайонс Р. Цифровая обработка сигналов: Второе издание. Пер. с англ. — М.: ООО «Бином-Пресс», 2006 г. — 656 с.: ил.

