В статье рассматривается метод синтеза регулятора для заданного объекта управления, и его моделирование с помощью встроенных приложений в MATLAB.
Ключевые слова: желаемая логарифмическая частотная характеристика, синтез регулятора.
Введение
При проектировании систем автоматического управления (САУ) главной задачей является синтез, т. е. создание новой системы путём определения всех свойств и качественных показателей системы.
Задача синтеза заключается в выборе структурной схемы и технических средств ее реализации, при котором обеспечиваются требуемые показатели системы.
В настоящее время существует большой спектр методов и алгоритмов для решения задачи синтеза, например корневой метод — [1, c.79]. В этой статье будет рассмотрен один из методов, использующий логарифмические частотные характеристики — метод желаемой логарифмической амплитудной частотной характеристики (ЖЛЧХ). Т. к. этот метод наиболее удобный для синтеза и может выполняться без дополнительной вычислительной работы.
Метод ЖЛЧХ заключается в построении ЛАЧХ и ЛФЧХ по заданному объекту и критериям качества для проектируемой САУ. Процесс построение ЖЛАЧХ обычно разбивается на несколько этапов: построение на низких частотах (НЧ), средних частотах (СЧ) и высоких частотах (ВЧ), определение запретной зоны для ЛФЧХ и по необходимости корректировка ЛАЧХ, чтобы система удовлетворяла заданным требованиям.
Построение НЧ области начинается с определения задающих воздействий, в зависимости от типа воздействия определяется допустимое значение установившейся ошибки и необходимая добротность системы. И в результате определяется прямая на участке НЧ, выше которой должная проходить ЖЛАЧХ.
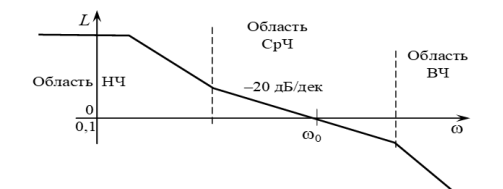
Рис. 1. Типовые области для метода ЖЛЧХ
Построение СЧ области определяется временем переходного процесса, перерегулированием и показателем колебательности, т. е.

В области ВЧ ЖЛАЧХ проводится либо параллельно ЛАЧХ, либо с большим наклоном, в зависимости от астатизма объекта управления.
Запретная зона ЛФЧХ определяется по показателю колебательности из условия устойчивости системы — [2, c. 350].
Пример синтеза регулятора для заданного объекта управления
Требуется для заданной передаточной функции объекта определить методом ЖЛЧХ передаточную функцию регулятора, при заданных требованиях к качеству системы автоматического управления (САУ):
Требования к качеству САУ:



где





Построение ЖЛАЧХ на низких частотах
В нашем случае входное воздействие имеет вид:

Для воспроизведения такого сигнала передаточная функция должна иметь не менее двух интегрирующих звеньев.
Из этого условия определяется необходимая добротность системы по ускорению:

Значит при заданном ускорении входного воздействия, ЖЛАЧХ должна проходить не ниже прямой (рис. 1)
При запасе в 3 дБ:

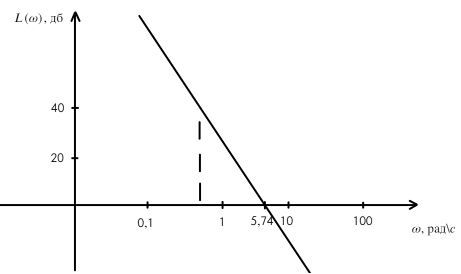
Рис. 2. ЖЛАЧХ в области НЧ для системы с астатизмом второго порядка
Построение ЖЛАЧХ на средних и высоких частотах
Находим частоту единичного усиления среднечастотной части ЖЛАЧХ
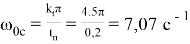
Определяем по графику (рис. 2) для = 40 %, М = 1,8.
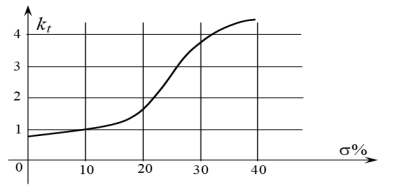
Рис. 3. Зависимость коэффициента kt от перерегулирования
Проверяем условие

Граничные значения модуля | W ж ( j )| для участка с наклоном –20 дБ/дек, проходящего через 0с :
|
|
lg(2,25)=0,35; |
|
|
lg(0,64)=–0,19; |
|
| |
|
|




В области высоких частот ЖЛАЧХ проводится либо параллельно ЛАЧХ неизменной части, либо с наклоном в -20 дБ/дек от суммарного наклона ЛАЧХ объекта управления. Частота сопряжения с областью средних частот

Объединяем НЧ, СЧ и ВЧ части ЖЛАЧХ (рис. 4).
Рис. 4. ЖЛАЧХ в области НЧ-СЧ-ВЧ
Построение ЛФЧХ и запретной зоны
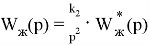
Желаемая передаточная функция определяется по формуле:
Желаемая передаточная состоит из двойного интегратора, двух апериодических звеньев и одного идеального дифферинцирующего звена.
Запретная зона строится следующим способом:
1. На оси ординат



2. На отрезке



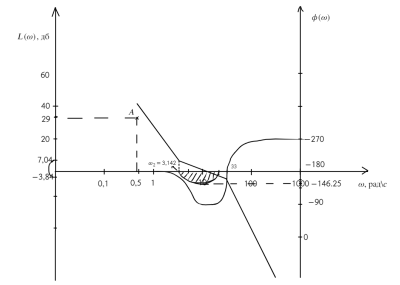
Рис. 5. ЖЛАЧХ в области НЧ-СЧ-ВЧ и запретная зона для ЛФЧХ
Моделирование в MATLAB для проверки параметров переходного процесса
Соберём нашу систему в Simulink с обратной связью:
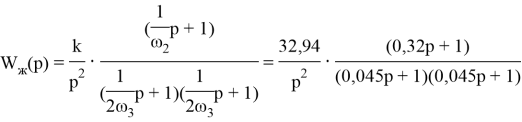
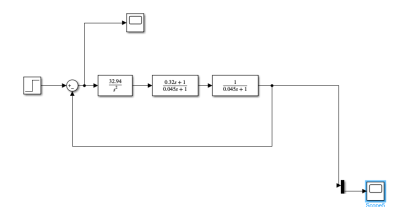
Рис. 6. Спроектированная САУ в Simulink
Проверим, удовлетворяет наша САУ заданным требованиям:
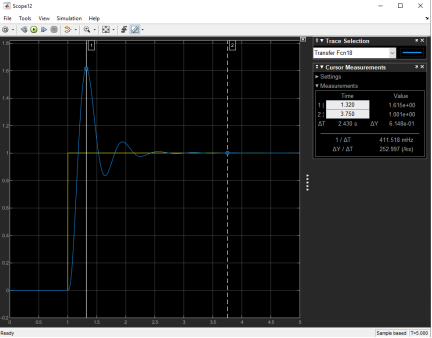
Рис. 7. Переходной процесс
По переходному процессу видно, что наша система на удовлетворяет требованию (коэффициент перерегулирования слишком большой). Немного скорректируем ЖЛАЧХ:
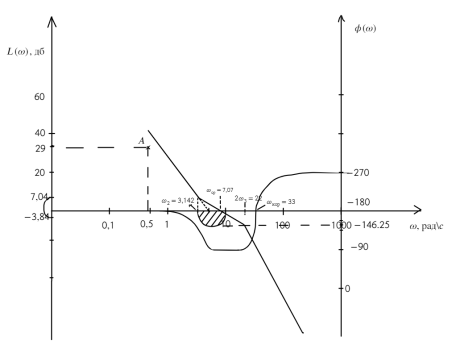
Рис. 8. Скорректированная ЖЛАЧХ
Соберём скорректированную ЖЛАЧХ и проверим параметры системы:

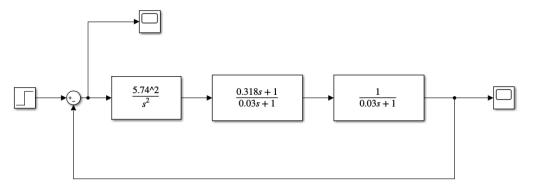
Рис. 9. Скорректированная САУ
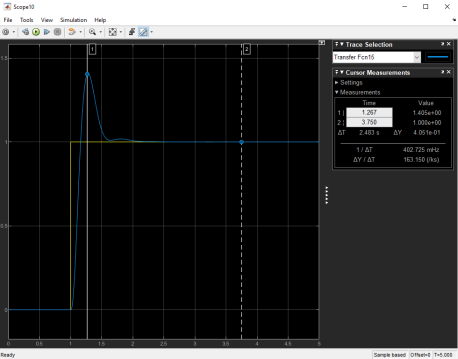
Рис. 10. Переходной процесс скорректированной САУ
По полученным параметрам, видно, что наша скорректированная САУ удовлетворяет требования задания.
Заключение
В результате проведенных в данной статье исследований можно сделать вывод, что метод желаемой логарифмической характеристики является применимым при синтезе регуляторов с заданным объектом управления. Поэтому этот метод следует использовать для определения параметров регулятора, т. к. метод очень наглядно показывает все этапы построения ЖЛАЧХ, позволяет сократить время синтеза и поддерживает внесение корректировок.
Литература:
1. В. Л. Земляков Основы автоматического управления, 2017. — 103 с
2. Теория систем автоматического регулирования. Издание третье, исправленное. Бесекерский В. А., Попов Е. П., 1975–768 с
3. Лазарева Т. Я., Мартемьянов Ю. Ф. Основы теории автоматического управления, 2004–352 с.

