Неуравновешенность деталей выражается в том, что деталь, например шкив, посаженный на вал, шейки которого свободно вращаются в подшипниках, стремится после вращения остановиться в одном определенном положении. Это указывает на то, что в нижней части шкива сосредоточено большее количество металла, чем в его верхней части, т. е. центр тяжести шкива не совпадает с осью вращения.
Переменные по величине и направлению динамические нагрузки, вызванные неуравновешенностью вращающихся масс, создают значительные давления на подшипники, опоры и фундамент, вызывают вибрации и добавочные потери мощности на трение в кинематических парах и их ускоренный износ, увеличивают напряжения в звеньях — всё это приводит к быстрому выходу из строя машины. Поэтому одной из актуальных задач современного машиностроения является уравновешивание действия сил и моментов сил инерции вращающихся звеньев.
В данной статье рассматривается технологическое решение по улучшению конструкции балансировочного станка.
Рассмотрим балансировочный стенд Б. В. Шитикова (рис. 1).
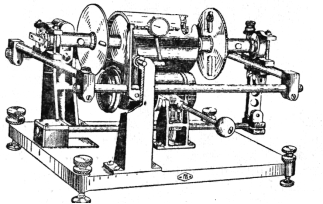
Рис. 1. Балансировочный стенд
Кинематическая схема рассматриваемого стенда представлена на рис. 2.
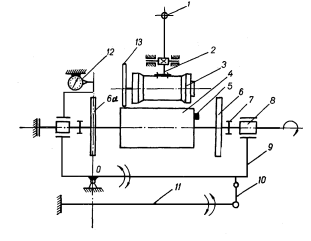
Рис. 2. Кинематическая схема балансировочного стенда: 1 — рукоятка; 2 — рычаг; 3 — вал электродвигателя; 4 — ротор; 5 — болт; 6, 6а — динамически отбалансированные диски; 7 — винты; 8 — подшипники; 9 — маятниковая рама; 10 — серьга; 11 — пружина; 12 — индикатор часового типа; 13 — фрикционное колесо
Вал ротора 4 (рис. 2) установлен на подшипниках 8, закрепленных в маятниковой раме 9. В роторе с помощью болта 5, размещенного в торцевой стенке, создается постоянный дисбаланс. На каждой полуоси ротора установлены динамически сбалансированные диски 6 и 6а.
При динамической балансировке ротора в пазы правого диска устанавливается дополнительный груз (входит в комплект). Диски могут вращаться вокруг оси ротора. Стопорятся с помощью винтов 7. Углы установки дисков измеряются циферблатом.
Разгон ротора осуществляется с помощью фрикционного диска 13, установленного на валу электродвигателя 3, который закреплен в станине коромысла 2. Другое плечо рычага заканчивается рукояткой 1, с помощью которой двигатель включается, и фрикционное колесо 13 прижимается к ротору 4.
Маятниковая рама опирается на стойки (на схеме не показаны), закрепленные на станине, и может совершать колебания относительно горизонтальной оси опор (ось спроецирована в точку О).
Пружина 11 в виде балки круглого сечения одним концом шарнирно прикреплена к раме маятника посредством серьги 10; другой конец пружины зажат в раме.
Амплитуда колебаний рамы маятника измеряется с помощью 12-часового индикатора с ценой деления 0,01 мм. Горизонтальность рамы достигается регулировкой опорных винтов, а контроль осуществляется по уровню, закрепленному в маятниковой раме.
В данной конструкции балансировочного стенда можно применить ряд измерительных модулей: акселерометр, виброметр и средства измерения угла дисбаланса относительно исходного положения (рис. 3). Наиболее эффективным методом измерения этого угла является использование фазометра, или угол можно определить по результатам нескольких измерений. Магнитный преобразователь испускает импульс каждый раз, когда проходит высокочастотный диск, и, таким образом, устанавливает исходное положение на окружности ротора.
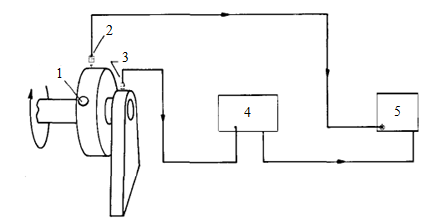
Рис. 3. Предлагаемые базовые измерительные датчики: 1 — высокочастотный диск; 2 — магнитный преобразователь; 3 — акселерометр; 4 — виброметр; 5 — фазометр
Аналогичным образом фотоэлектрический тахометрический зонд может быть закреплен для сканирования ротора с целью обнаружения метки срабатывания, например, кусочка клейкой ленты или окрашенного пятна с (инфракрасной) отражательной способностью, контрастирующей с фоном. При каждом проходе метки испускается импульс. Зонд должен питаться от источника постоянного тока напряжением от 6 до 10 вольт. Выходной сигнал датчика подается в опорный канал (А) фазометра. Выходной сигнал от акселерометра подается на виброметр, который отображает уровень вибрации. Сигнал, снятый с «Выхода регистратора» Виброметра, подается в канал В Фазометра.
Таким образом, после запуска стенда, на виброметре будет отображаться уровень вибрации, а на фазометре — угол, которые вместе дают вектор, представляющий несбалансированную массу и направление ее действия.
Литература:
- Анципорович П. П. Балансировка вращающихся масс: учебно-методическое пособие к лабораторным работам по дисциплине «Теория механизмов, машин и манипуляторов» / П. П. Анципорович, В. В. Кудин, Е. М. Дубовская. — Минск: Белорусский национальный технический университет, 2011. — 27 с. — ISBN 978–985–525–606–0.
- Базров Б. М. Технология сборки машин / Б. М. Базров, О. В. Таратынов, В. В. Клепиков. — Москва: Спектр, 2011. — 368 с.

