Теплоэнергетические комплексы (ТЭК) являются основой организации удобства для городской жизни. Ввиду устарелого состояния основного числа ТЭК, проблема модернизации, экономии топлива и электроэнергии и повышения производительности теплоэнергетических комплексов является актуальной задачей на сегодня. Процессы, протекающие в теплоэнергетических установках, являются сложными, нелинейными. Поэтому, исследование и моделирование процессов в ТЭК является сложной задачей. Моделирование процессов ТЭК позволит определить основные параметры, влияющие на процесс.
В статье в качестве объекта рассмотрена каскадная система с ПИД-регулятором во внешнем контуре, с введением функциональной составляющей сигнала рассогласования внешнего контура и отрицательной обратной связью по сигналу рассогласования между заданием по расходу пара и сигналом расхода пара на выходе котла во внутреннем контуре.
Ключевые слова: теплоэнергетический комплекс, регулятор, котел, паровая магистраль.
Эффективное потребление энергетических ресурсов в эпоху колоссального развития, тяжело распределять пропорционально без индивидуального учета и рационального потребления энергетических и водных ресурсов. Поэтому для решения данной проблемы, нужно правильно и качественно модернизировать работу теплоэнергетического комплекса.
Быстроразвивающийся век техники требует перехода к оптимизации проектируемых теплоэнергетических комплексов с целью построения их эффективности, сокращения энергозатрат и капитальных вложений. Роль моделирования при этих задачах очень важна. В настоящей работе моделирование процессов ТЭК позволит определить основные параметры, влияющие на процесс. Что позволит дать оценку по улучшению качества работы ТЭК.
Материалы и методы
- Объект исследования
Для обеспечения потребителя нужным количеством пара используют автоматические системы регулирования топлива. За счет разных внешних и внутренних возмущений происходит нарушение теплового баланса котла. К внутренним возмущениям относятся такие характеристики как теплота сгорания и его расхода, колебания давления газа, изменение характеристик регулирующей трубопроводной арматуры. Внешние возмущения — это такие возмущения которые связанны с количеством потребляемого пара. Таким образом, система автоматического регулирования топлива должна выполнять две основные функции: компенсировать внутренние и внешние возмущения с помощью одного основного управляющего воздействия — расхода топлива.
Структурная схема котла в паровой магистрали имеет следующий вид (рисунок 1). [6]
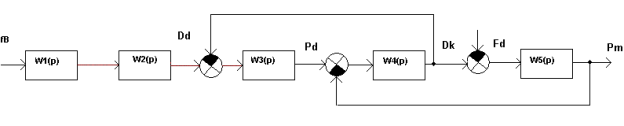
Рис. 1. Структурная схема котла в паровой магистрали
где f B — расход потребляемого газа;
D k — расход потребляемого пара;
F d — изменение потребляемого пара;
D d — количество генерируемого пара;
W 1 (p) — инерционность топки;
W 2 (p) — количество генерируемого пара с тепловосприятием топки;
P d — давление в барабане котла;
P m — давление в паровой магистрали.
Передаточная функция W 1 (p) характеризует инерционность топки. И будет имеет вид инерционного звена с запаздыванием.
W
1
(p)=

где запаздывание составляет 0,01с, постоянная время топки 0,01.
Передаточная функция W 2 (p) характеризует количество генерируемого пара в зависимости от тепловосприятия топки, и будет иметь следующий вид:
W
2
(p)=

где время интегрирования равно 0,02с.
Передаточная функция W 3 (p) характеризует аккумуляцию тепла в котле, связанную с изменением давления.
W
3
=

Падение давления в пароперегревателе и на участке от пароперегревателя до стопорного клапана турбины будет выражено в виде:
W 4 (p)=k 4 , (4)
Которое будет иметь вид усилительного звена.
Участок «давление в магистрали — расход топлива» описывается передаточной функцией следующего вида:
W
5
(p)=

где постоянная времени равна 0,03 с.
1.1 Моделирование объекта управления
Моделирования объекта управления проводится в программной среде TIA Portal. Необходимо собрать конфигурацию ПЛК, где в качестве контроллера нужно выбрать CPU 1518–4 PN/DP, так как 1500 серия позволяет использовать более широкий спектр блоков регулирования. Для отображения данных и вывод на график, используем HMI панель TP2200 Compact.
В данной работе объект управления состоит из нескольких звеньев с обратной связью и воздействием возмущении.
Моделирования САР будет производиться при помощи блоков CONT_C. Программу необходимо выполнять в блоках прерывания (OB30–35).
Реализуем модель САР на рисунках 2–5.
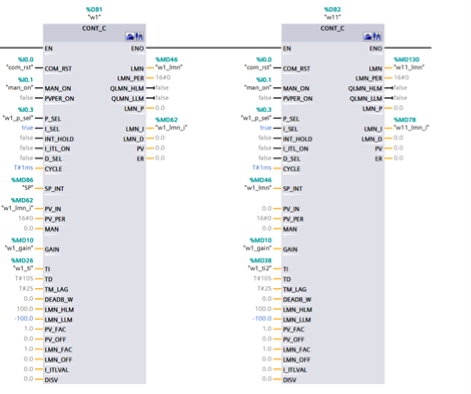
Рис. 2. Модель САР объекта регулирования
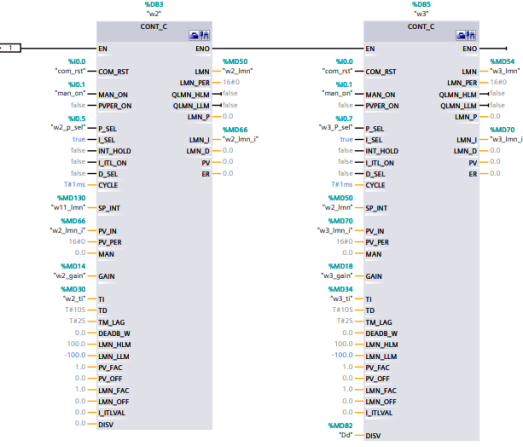
Рис. 3. Модель САР объекта регулирования (продолжение)
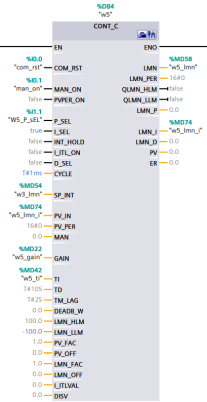
Рис. 4. Модель САР объекта регулирования (продолжение)
Таблица тэгов приведена на рисунке 5.
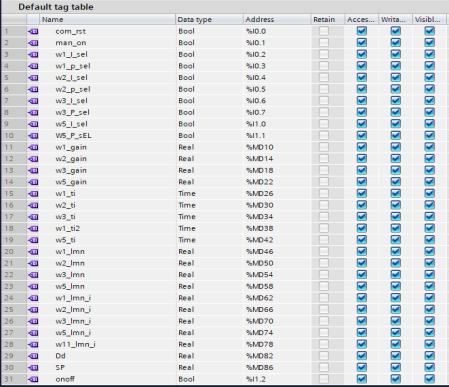
Рис. 5. Таблица тэгов для модели объекта регулирования
В результате получим следующую переходную характеристику
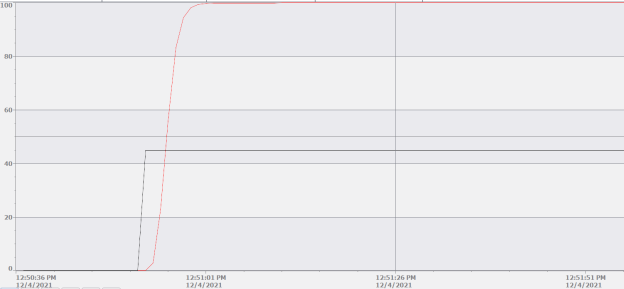
Рис. 6. Переходная характеристика модели объекта регулирования
- Построение структурной схемы подсистемы
Давайте рассмотрим структурную схему системы на рисунке 7, эта схема регулирования работы котла в так называемом регулирующем режиме. На схеме введены следующие обозначения:
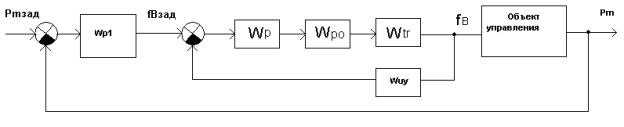
Рис. 7. Подсистема регулирования
где W p1 — передаточная функция корректирующего регулятора;
W p — передаточная функция внутреннего регулятора;
W tr — передаточная функция участка трубопровода от регулирующей заслонки до сужающего устройства;
W po — передаточная функция регулирующей заслонки с электроприводом;
W uy — передаточная функция измерительного узла (сужающее устройство — датчик расхода топлива).
Участок трубопровода от регулирующей заслонки до сужающего устройства описывается передаточной функцией звена первого порядка. (Исходные данные: взяты для ТЭЦ-1 г.Алматы).
А. А. Журавлев и М. Л. Шит писали: «Значения коэффициентов для рассматриваемого случая, поскольку объект управления представляет собой звено, как минимум четвертого порядка (рисунок 1, рисунок 7) весьма сложны для вычисления, поэтому для определения их оптимальных значений был использован метод поиска значений с использованием полного факторного эксперимента с элементами перебора вариантов и отсеивания неудачных вариантов. Для повышения точности работы в систему была введена отрицательная обратная связь, по разности сигналов задания расхода пара на турбину для данного котла и расхода пара после котла. Сигнал этой обратной связи подается на вход внутреннего контура». [5]
Результаты
2.1 Моделирование структурной схемы подсистемы
Для реализации данной схемы используем блоки регулирования PID Compact. Данные блоки самостоятельно вычисляют коэффициенты регулирования пропорциональной, интегрирующей и дифференцирующей части. Подключим регуляторы к модели объекта управления:
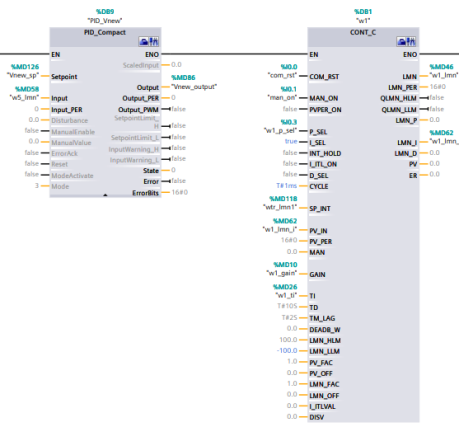
Рис. 8. Модель САР с PID-регуляторами
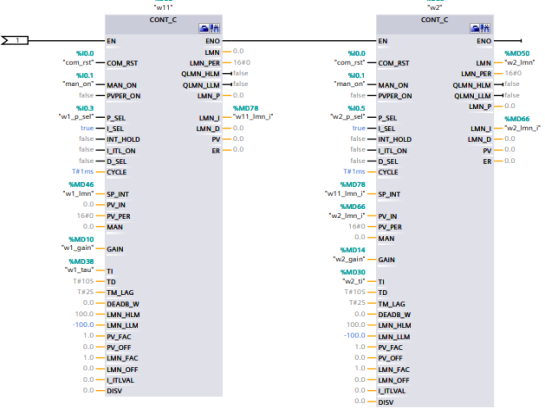
Рис. 9. Модель САР с PID-регуляторами (продолжение)
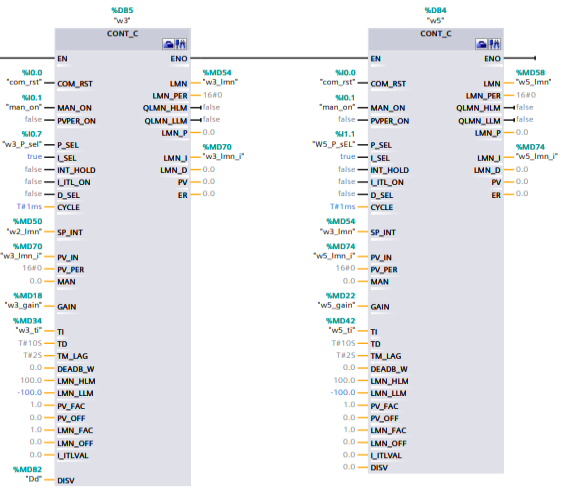
Рис. 10. Модель САР с PID-регуляторами (продолжение)
Вычисления параметров регулирования изображено на рисунке 11.
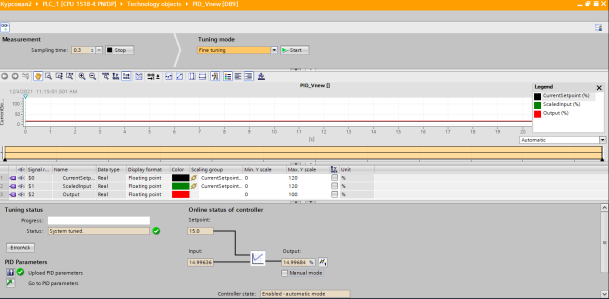
Рис. 11. Подбор коэффициентов PID-регуляторов
По окончанию получим следующие значения для внешнего контура:
k p =0.33;
k i =21.629;
k d =5.170.
Для внутреннего контура:
k p =269.16;
k i =11.634;
k d =2.951.
Остальные параметры блоков PID Compact приведены в приложении А.
В результате получим следующую переходную характеристику
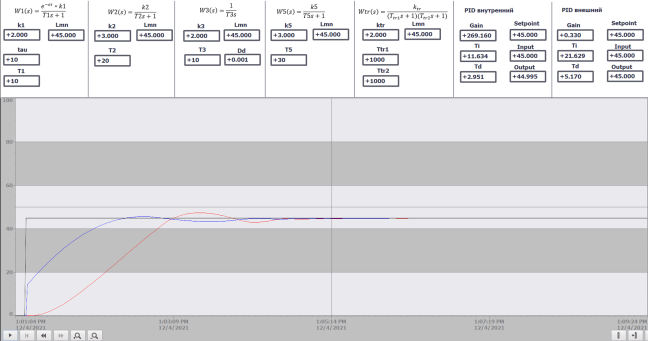
Рис. 12. Переходная характеристика модели с PID-регуляторов
Обсуждение и вывод
2.2 Анализ качества регулирования
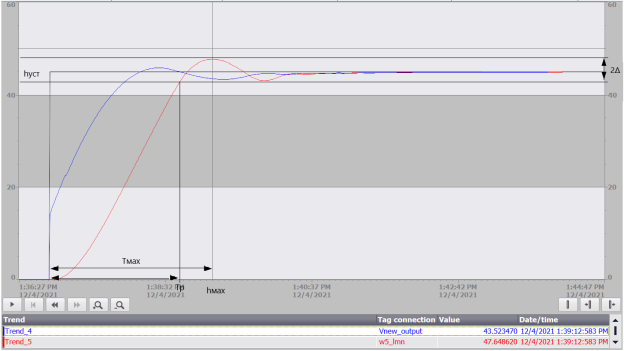
Рис. 13. Переходной процесс системы с PID-регуляторами
На рисунке 12 представлена переходная характеристика САР котла в паровой магистрали с PID-регуляторами. Основные показатели качества регулирования:
– время регулирования T pPID =40сек;
– перерегулирование

– время нарастания Т н =40сек;
– время достижения первого максимума Т макс =52сек;
– частота колебаний Т=15сек.
В данном подразделе была получена математическая модель котла в паровой магистрали. Модель исследована в TIA Portal. По графикам переходного процесса, были проанализированы показатели качества регулирования.
Заключение
В данной работе была разработана математическая модель системы регулирования подачи топлива газомазутного парового котла с учетом требований экономии энергоресурсов при управлении в программной среде TIA-портал. В качестве входных элементов, были использованы блоки непрерывного регулирования CONT_C, а в качестве регуляторов PID_COMPACT. Блоки непрерывного регулирования позволяют сконфигурировать необходимую передаточную характеристику для каждого звена в системе. Данная модель состоит из инерционного звена с запаздыванием, апериодических звеньев первого и второго порядка, а также из усилительных звеньев. Блок PID_COMPACT позволяет самостоятельно вычислить P-, I-, и D компоненты во время запуска, использовав Fine Tuning.
По графикам переходного процесса, были проанализированы показатели качества регулирования. Основные показатели качества регулирования:
– время регулирования T pPID =40сек;
– перерегулирование
– время нарастания Т н =40сек;
– время достижения первого максимума Т макс =52сек;
– частота колебаний Т=15сек.
По полученным данным можно сделать вывод что система показала устойчивую работу и соответствуем всем параметрам.
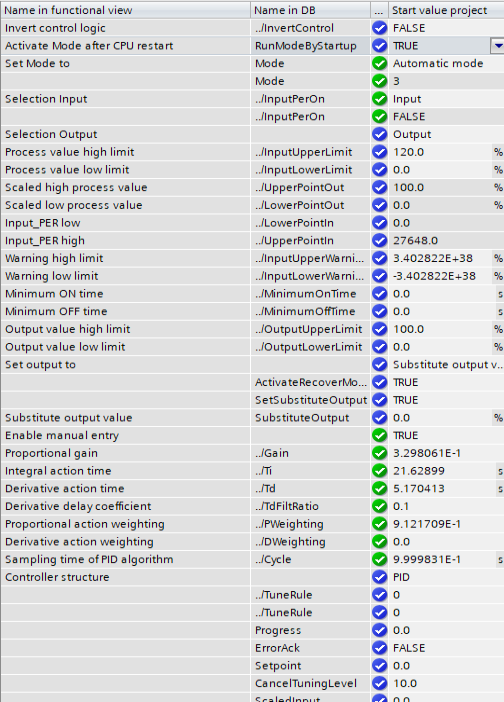
Рис. 14. Параметры корректирующего регулятора
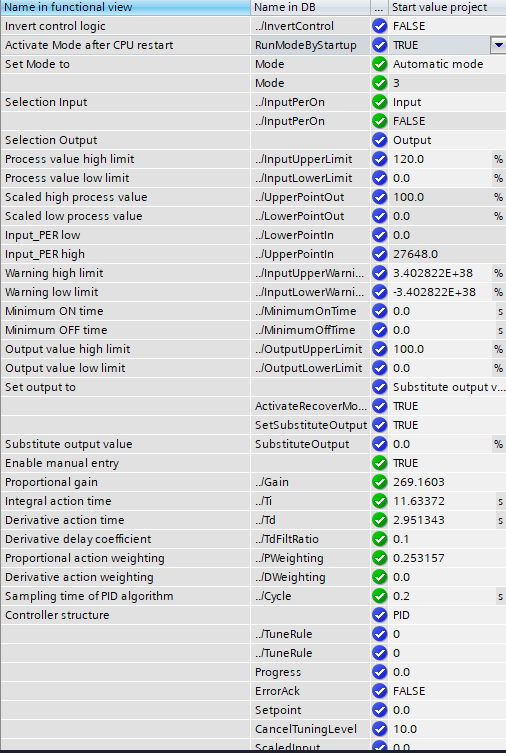
Рис. 15. Параметры стабилизирующего регулятора
Литература:
- Иванов В. А. Регулирование энергоблоков. — Л.: Машиностроение, 1982.-311с.
- Astrom K. D., R. D. Bell “Drum-boiler dynamics”. Automatica, 36(2000) 363–378.
- Шумская Л. С. Изменение уровня в барабанных котлах при нестационарных режимах. Теплоэнергетика, № 6, 1954, с.35–39.
- Шумская Л. С. Номограммы для определения постоянных времени по давлению и уровню в барабанных котлах при нестационарных режимах. «Автоматическое регулирование и управление энергетических установок». Труды ЦКТИ, вып.147, Л. 1977, с.45–69.
- https://textarchive.ru/c-2804307.html
- https://cyberleninka.ru/article/n/proektirovanie-zakona-upravleniya-sistemoy-regulirovaniya-podachi-topliva-parovogo-kotla-s-uchetom-trebovaniy-ekonomii-energoresursov/viewer

