




Проанализируем возможность уменьшения погрешности от акустического воздействия высокой интенсивности с помощью схемных решений, а именно, двухканальную компенсацию.
В одноконтурных системах невозможно удовлетворение условиям инвариантности без нарушения условий устойчивости. Для выполнения условий устойчивости по отношению к определенным возмущениям необходимо, чтобы информация об этом возмущении поступала в контролируемую точку, относительно которой достигается инвариантность, не менее, чем по двум каналам.
Двухканальная автокомпенсация влияния акустического излучения на гироскоп достигается прямым использованием принципа двухканальности Б.Н. Петрова и состоит в применении двух связанных электромеханически одинаковых гироскопов с противоположными по направлению векторами кинетических моментов [1]. Обеспечение поставленной цели достигается идентификацией начальной выставки приборов относительно общего основания.
Возможность автокомпенсации влияния акустического силового воздействия на ДУСУ в двухканальной схеме реализуется созданием вместо одного – двух структурно однородных каналов для получения двух функционально одинаковых проявлений внешних помех, различающихся только знаком. Однородность каналов прохождения акустического возмущения обеспечивается использованием гироскопов, имеющих одинаковую кинематику подвеса.
Оценим специфику некоторых электромеханических устройств, использующих двухстепенные гироскопы в качестве комплектующих элементов при работе в интенсивных акустических полях. Для примера рассмотрим гиростабилизированную платформу.
Известно, что для создания на подвижных объектах триортогональной системы координат, либо заданного ориентирного направления, используются различного рода гироскопические стабилизаторы. Одной из разновидностей гиростабилизаторов являются, как известно, силовые гироскопические стабилизаторы, представляющие собой электромеханические устройства, снабженные специальными стабилизирующими двигателями для компенсации внешних возмущающих моментов, действующих на стабилизированную платформу и управляемых по сигналам двухстепенных гироскопов, выполняющих роль чувствительных элементов.
Исследования показали, что эффективным способом компенсации влияния интенсивных акустических полей является модуляция постоянных возмущающих моментов периодической функцией времени. Известная техническая реализация этого способа состоит в автокомпенсации акустической погрешности путем принудительного вращения подвеса гироскопа относительно оси, параллельной вектору кинетического момента гироскопа [2].
Расширим задачу анализа и будем рассматривать работу гиростабилизатора в реальных условиях одновременного воздействия как интенсивных акустических возмущений, так и вибрации корпуса носителя, обусловленной работой маршевых двигателей и силовых установок. Для этого случая предлагается перспективная схема силового (рис. 1) гиростабилизатора.
Двухосный силовой гиростабилизатор (рис. 1) состоит
из основания, на котором установлены амортизаторы с закрепленными на
них подшипниками осей прецессии двухстепенных гироскопов с одинаковой
кинематикой подвеса, параллельными между собой векторами кинетических
моментов
![]() и
и
![]() и взаимноперпендикулярными осями прецессии. Основание принудительно
вращается с угловой скоростью
и взаимноперпендикулярными осями прецессии. Основание принудительно
вращается с угловой скоростью
![]() специальным двигателем вокруг оси, перпендикулярной плоскости
стабилизированной платформы, на которой оно установлено.
специальным двигателем вокруг оси, перпендикулярной плоскости
стабилизированной платформы, на которой оно установлено.
Выходной сигнал датчиков угла и гироскопов поступает на преобразователь координат, который механически соединен с основанием. Выходной сигнал преобразователя координат поступает на согласующее устройство, а также на вход усилителей, управляющих стабилизирующими двигателями.
Силовой гиростабилизатор при одновременном
воздействии интенсивных акустических возмущений и вибрации корпуса
носителя работает следующим образом. Интенсивные акустические поля
генерируют в элементах конструкции гироскопов изгибные колебания,
которые в совокупности приводят к появлению на некоторых частотах
постоянных по величине и направлению возмущающих моментов,
ориентированных вдоль осей прецессии, и, следовательно, служат
причиной возникновения систематических погрешностей гироприборов.
Принудительное вращение подвесов гироскопов вместе с основанием с
угловой скоростью
![]() специальным двигателем вокруг оси, перпендикулярной плоскости
стабилизированной платформы и параллельной векторам кинетических
моментов
специальным двигателем вокруг оси, перпендикулярной плоскости
стабилизированной платформы и параллельной векторам кинетических
моментов
![]() и
и
![]() гироскопов, позволяет смодулировать вектор возмущающего момента
периодической функцией времени типа
гироскопов, позволяет смодулировать вектор возмущающего момента
периодической функцией времени типа
![]() .
Это приведет к такой же модуляции во времени систематической
погрешности двухстепенного гироскопа и, тем самым, позволит свести к
нулю ее среднее значение за период вращения.
.
Это приведет к такой же модуляции во времени систематической
погрешности двухстепенного гироскопа и, тем самым, позволит свести к
нулю ее среднее значение за период вращения.
Устранение влияния вибрации основания, вызванной воздействием интенсивного акустического возмущения осуществляется установкой подшипников осей прецессии на амортизаторы.
Ввиду того, что принудительное вращение подвесов гироскопов приводит к их переориентации в пространстве, тогда как стабилизированная платформа вместе с двигателями остается неподвижной, сигналы датчиков угла гироскопов поступают на усилители стабилизирующих двигателей с преобразователя координат, механически связанного с основанием и повторяющего его вращение, а электрически соединенного с датчиками угла.
В исходный момент времени векторы кинетических
моментов
![]() и
и
![]() гироскопов параллельны вектору
гироскопов параллельны вектору
![]() угловой скорости вращения основания. С проявлением возмущений по осям
стабилизации происходит рассогласование этих векторов, что приводит к
возникновению дополнительных гироскопических моментов, обусловленных
влиянием перекрестной составляющей вектора
угловой скорости вращения основания. С проявлением возмущений по осям
стабилизации происходит рассогласование этих векторов, что приводит к
возникновению дополнительных гироскопических моментов, обусловленных
влиянием перекрестной составляющей вектора
![]() ,
параллельной осям чувствительности гироскопов. Электрический сигнал
датчиков угла, пропорциональный этой скорости, предварительно
усиленный усилителями, поступает на датчики момента, формирующие
величину и направление момента, чтобы обеспечить исходную
параллельность векторов
,
параллельной осям чувствительности гироскопов. Электрический сигнал
датчиков угла, пропорциональный этой скорости, предварительно
усиленный усилителями, поступает на датчики момента, формирующие
величину и направление момента, чтобы обеспечить исходную
параллельность векторов
![]() ,
,
![]() и
и
![]() .
.
Для устранения влияния вибрации корпуса носителя на погрешность стабилизации подшипники наружной рамы силового гиростабилизатора устанавливаются на амортизаторах [3].
Дальнейшим усовершенствованием схемы силового гиростабилизатора является ГС с принудительным вращением подвесов электрически связанных двухстепенных гироскопов с противоположно направленными векторами кинетических моментов и одинаковой ориентацией осей подвеса (рис. 2). В этом случае датчики угла гироскопов через суммирующее устройство и усилители соединяются с укрепленными на осях прецессии датчиками момента, а через дифференциальный усилитель подключаются к преобразователю координат. Применение механического спарника в этом случае нецелесообразно ввиду нарушения его нормального функционирования при интенсивности звукового излучения выше 160 дБ. Кроме того, механический спарник практически исключает использование в гиростабилизаторе поплавковых гироскопов.
Формирование выходного сигнала двухстепенных гироскопов в виде разности выходных сигналов двух электрически связанных приборов позволяет компенсировать влияние мгновенных значений моментов-помех, обусловленных боковой чувствительностью гироскопов и влиянием углового ускорения корпуса носителя как в случае стационарного, так и нестационарного характера их изменения во времени. Кроме того, компенсируется также сдвиг нуля, имеющий место при кинематическом возмущении со стороны корпуса носителя даже при угле поворота подвижной части гироскопа, равной нулю.
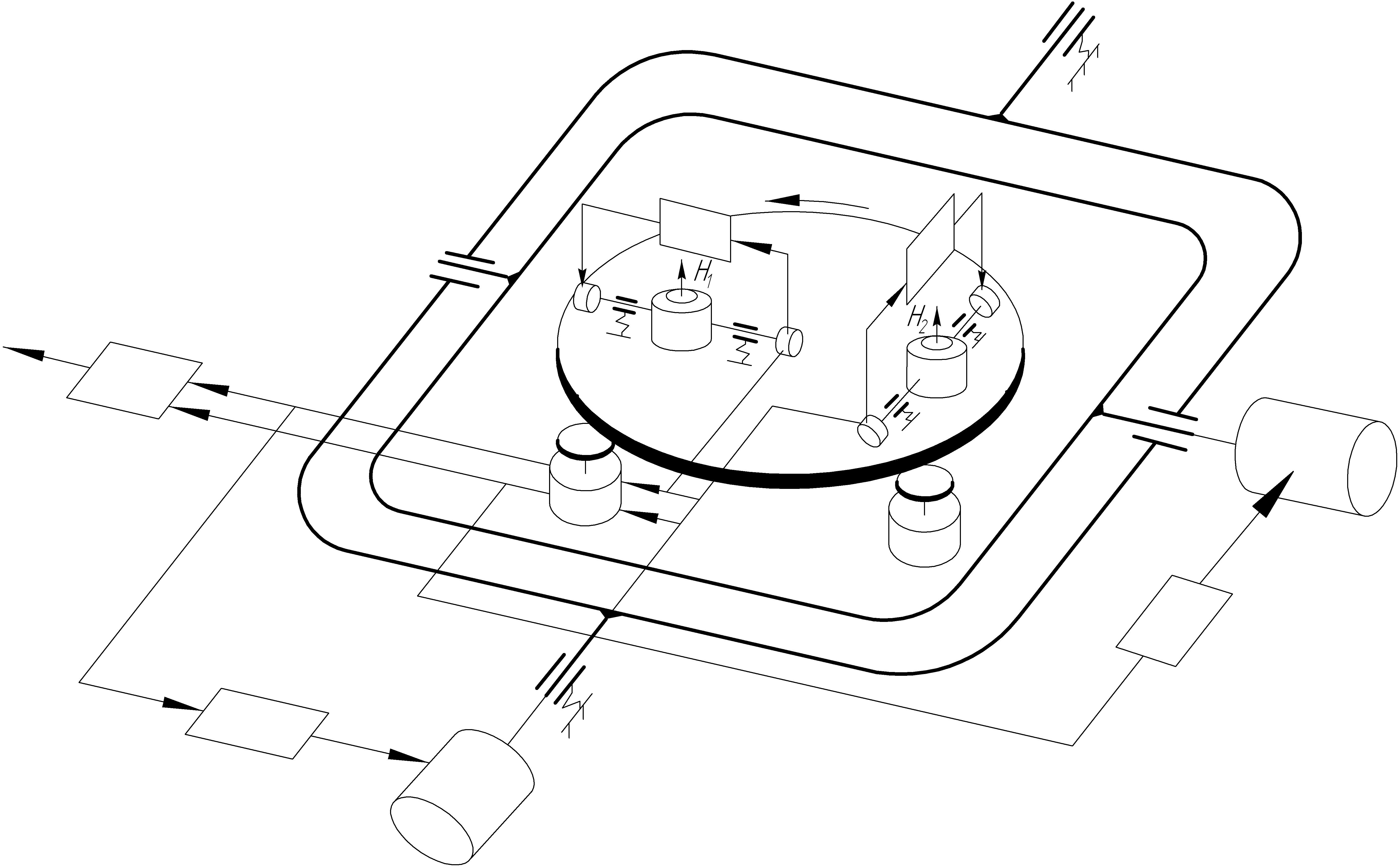
Рис. 1. Кинематическая схема силового гиростабилизатора, работающего в условиях
одновременного кинематического и акустического высокой интенсивности воздействий
В исходном положении векторы кинетических моментов
![]() гироскопов параллельны между собой и перпендикулярны плоскости
стабилизированной платформы. Интенсивное акустическое возмущение
генерирует в элементах конструкции гироскопов изгибные колебания и
напряжения в материале, которые в совокупности приводят к появлению
постоянных возмущающих моментов и, следовательно, к систематическим
погрешностям гироскопов. Формирование выходного сигнала двухстепенных
гироскопов устройства для гироскопической стабилизации изделий в виде
разности выходных сигналов двух электрически связанных
разновращающихся гироскопов позволяет компенсировать влияние
мгновенных значений моментов-помех, обусловленных боковой
чувствительностью гироскопов и влиянием углового ускорения корпуса
носителя, причем, как в случае стационарного, так и в случае
нестационарного характера их изменения во времени. Кроме того,
компенсируется также сдвиг нуля, имеющий место при кинематическом
возмущении со стороны корпуса носителя даже при угле поворота
подвижной части прибора равной нулю. Жесткая отрицательная обратная
связь по сумме сигналов датчиков угла гироскопов позволяет провести
взаимную коррекцию их положения между собой и вектором
гироскопов параллельны между собой и перпендикулярны плоскости
стабилизированной платформы. Интенсивное акустическое возмущение
генерирует в элементах конструкции гироскопов изгибные колебания и
напряжения в материале, которые в совокупности приводят к появлению
постоянных возмущающих моментов и, следовательно, к систематическим
погрешностям гироскопов. Формирование выходного сигнала двухстепенных
гироскопов устройства для гироскопической стабилизации изделий в виде
разности выходных сигналов двух электрически связанных
разновращающихся гироскопов позволяет компенсировать влияние
мгновенных значений моментов-помех, обусловленных боковой
чувствительностью гироскопов и влиянием углового ускорения корпуса
носителя, причем, как в случае стационарного, так и в случае
нестационарного характера их изменения во времени. Кроме того,
компенсируется также сдвиг нуля, имеющий место при кинематическом
возмущении со стороны корпуса носителя даже при угле поворота
подвижной части прибора равной нулю. Жесткая отрицательная обратная
связь по сумме сигналов датчиков угла гироскопов позволяет провести
взаимную коррекцию их положения между собой и вектором
![]() угловой скорости основания платформы подачей сигнала на датчики
момента.
угловой скорости основания платформы подачей сигнала на датчики
момента.
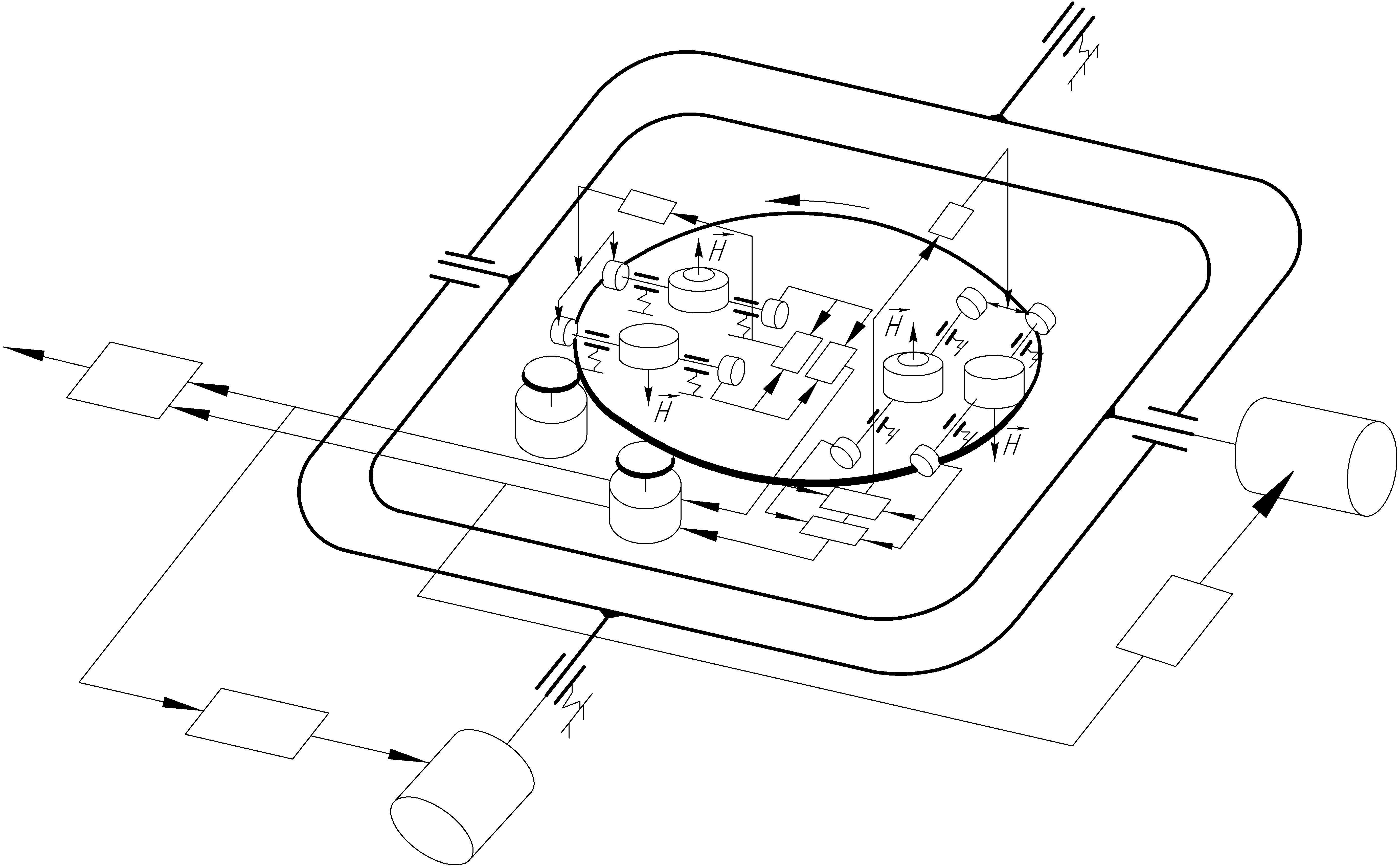
Рис. 2. Кинематическая схема силового гиростабилизатора с двухканальной автокомпенсационной схемой уменьшения влияния внешних механических воздействий
Принудительное вращение подвесов гироскопов вместе с основанием с
угловой скоростью
![]() двигателем вокруг оси, перпендикулярной плоскости стабилизированной
платформы и параллельной векторам кинетических моментов
двигателем вокруг оси, перпендикулярной плоскости стабилизированной
платформы и параллельной векторам кинетических моментов
![]() гироскопов, позволяет смодулировать векторы возмущающих моментов,
обусловленных влиянием интенсивного акустического излучения,
дебаланса гироскопов, сил сухого трения, а также других
инструментальных погрешностей периодической функцией времени типа
гироскопов, позволяет смодулировать векторы возмущающих моментов,
обусловленных влиянием интенсивного акустического излучения,
дебаланса гироскопов, сил сухого трения, а также других
инструментальных погрешностей периодической функцией времени типа
![]() ,
что приведет к такой же модуляции во времени систематической
погрешности гироскопов и, тем самым, позволит свести к нулю ее
среднее значение за период вращения.
,
что приведет к такой же модуляции во времени систематической
погрешности гироскопов и, тем самым, позволит свести к нулю ее
среднее значение за период вращения.
Литература:
1. Карачун В.В. Об уменьшении влияния движения основания на погрешность трехосного гиростабилизатора // Механика гироскопических систем: Респ. междувед. научн.-техн. сб. – 1983. – Вып. 2. – С. 47-50.
2. Карачун В.В. Гиростабилизированная трехосная платформа. Автокомпенсация влияния внешних помех / В.В. Карачун, В.Н. Мельник, О.Я. Ковалец; Нац. техн. ун-т Украины «КПИ». – Киев: «Корнейчук», 2010. - 192с.: ил., табл. – Библиогр. : с. 187-191.
3. Melnik V.N., Karachun V.V. Influence of acoustic radiation on the sensors of a gyrostabilisation platform// International Applied Mechanics. – Vol. 40, – №10, 2004. – P. 1164-1170.
