1 Введение
Тема работы посвящена исследованию возможности применения классических методов машинного обучения к оценке параметров и прогнозированию нерегулярных колебательных процессов. Известно, что полигармоническое колебание <на глаз> бывает трудно отличить от хаотического. Однако задачи прогнозирования для полигармонического процесса решается легче, поскольку модель процесса не обладает свойствами локальной неустойчивости (<разбегания траекторий>). В статье разработаны программы оценивания параметров и прогнозирования полигармонических колебаний на основе методов решения целевых неравенств, развитых В. А. Якубовичем и его учениками [1, 2, 3, 4]. Особенностью задачи является наличие ограниченных погрешностей измерений, затрудняющих применение традиционных методов математической статистики.
2 Постановка задачи
Пусть измерению доступен сигнал вида:
y ( t ) = A 1 sin( ω 1 t ) + ... + A n sin( ω n t ) + φ ( t ) , (2.1)
где n ≥ 2, ω i и A i — неизвестные частоты и амплитуды, φ ( t ) — ограниченная помеха: |φ ( t ) | (; ∆ φ < ∞ . Отслеживать можем только суммарный сигнал y , про отдельные составляющие неизвестно.
Задача состоит в том, чтобы оценить неизвестные частоты ω i и амплитуды A i ( i = 1 ,..., n ) и построить модель y ˆ( t ) сигнала y ( t ) с заданной точностью.
Модель строится с оценочными коэффициентами и выглядит:
y ˆ( t ) = A ˆ 1 sin( ω ˆ 1 t ) + ... + A ˆ n sin( ω ˆ n t ) . (2.2)
Для дискретных точек t i = i · h с шагом h = 1 / 100, i = 1 ,..., N , где N — количество точек, вводим цель оценивания:
|y i − y ˆ i | 2 < δ, i = 1 ,..., N, (2.3)
где δ — заданная точность, y i = y ( t i ) и y ˆ i = y ˆ( t i ) .
Сигнал (2.1) двукратным дифференцированием можно свести к уравнению y ¨ + ω 2 y = 0, которое удобно для оценки неизвестного параметра ω 2 .
По аналогии для разных n будет получаться система из n таких же дифференциальных уравнений. Выражения с суммой и произведением неизвестных параметров в них будут переобозначаться в θ i и решение будет состоять в получении оценочных θ ˆ i с заданной точностью.
3 Оценка параметров алгоритмом «Полоска» в условиях помех
Для поставленной задачи существует несколько решений через методы: рекуррентных целевых неравенств (РЦН), стохастической аппроксимации, многошаговых алгоритмов адаптации. Мы хотим исследовать возможность аппроксимации полигармонических сигналов с помощью конечно-сходящегося алгоритма, рассчитывая, что при большом числе параметров он будет проще и иметь меньшую чувствительность к помехам.
Для описания алгоритма «Полоска» [4, 5, 6] в условиях нашей задачи рассмотрим модель (2.1) в общем виде:
y = θ T x + φ,
где y — выходная переменная, θ и x — векторы параметров и входов системы, они подробно описаны в пунктах с оценкой параметров, |φ ( t ) | (; ∆ φ .
Задача сводится к решению рекуррентных целевых неравенств относительно вектора неизвестных параметров θ .
|y k − θ T x k − 1 | (; C, k > k ∗ < N. (3.1)
Здесь k — номера шагов при решении неравенств, а y k — входящий сигнал с помехой, полученный по дискретному аналогу формулы (2.1), а C — константа, характеризующая ширину полосы.





Свойства подобных и более общих алгоритмов впервые были изучены в рамках развитого В. А. Якубовичем и его учениками метода решения рекуррентных целевых неравенств [1, 2, 3].
Было доказано в [1, 2, 4, 5, 6], что различные модификации алгоритма «Полоска» сходятся за конечное число шагов. В постановке нашей задачи к входному сигналу добавили ограниченное возмущение φ ( t ), поэтому нужно получить условия сходимости алгоритма в этом случае. Они даются следующей теоремой.
Теорема 1. Если существует такой вектор θ ∗ , что
|y k − θ ∗ x k | <= C ∀k,
где y k — полученный из формулы (2.1) входящий сигнал, в котором помеха |φ ( t k ) |<=c· ∆ φ , то алгоритм
(3.2) — конечно сходящийся, т. е. θ k = θ k − 1 и |η k | (; Cпри всех достаточно больших k.
Доказательство основано на применении и расширении результата известной теоремы из книги В. А. Якубовича на случай наличия помех. Верхняя оценка помехи здесь больше той, которая в постановке задачи. Это связано с определенным оцениванием сигнала по дискретной формуле.
Таким образом, при рассмотрении неравенств не важно, есть ограниченная помеха или нет. Нам важно, какое неравенство разрешимо и при какой ширине полосы.
4. Оценка параметров алгоритмом «Полоска» в условиях помех
Подробно рассмотрим метод на частном случае нашей задачи, он будет применяться и для больших n . Решение задачи основано на оценке модели сигнала в виде дифференциального уравнения порядка 2 n .
Бигармоническая модель выглядит так:


3.1 Оценка параметров для n = 2

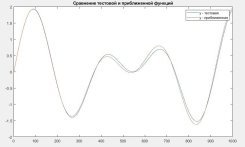
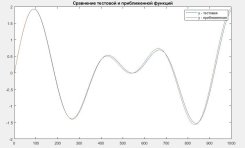
а) φ = 10 − 5 sin(50 · k · h ).б) φ = 0.

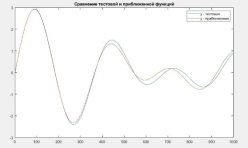
Получим сходимость за 86 шагов и оценки θ ˆ 1 = 6 . 0510, θ ˆ 2 = 8 . 0755 и пересчитаем их в исходные.
Получаем решение ω ˆ 1 = 1 . 4097, ω ˆ 2 = 2 . 0159. Получившаяся погрешность менее одного процента.
Построим график с выбранными параметрами и приближенными на Рис. 1 для случая с помехой и без. Было подсчитано, что при изменении параметров θ ˆ по ходу алгоритма значение функционала
Q ( θ ) уменьшается.
5. Сравнение с МНК
Проведем сравнение алгоритма «Полоска» и метода наименьших квадратов (МНК) для оценки параметров сигнала с помехой.
Как говорилось ранее, в случае наличия возмущений в сигнале он может не работать или давать большую погрешность. Проверим это, проведя оценки для смоделированного сигнала с помехой и без нее.
Зададим функцию по формуле yk = sin(ω1 · k · h) + sin(ω2 · k · h) + φ(k · h) с помехой. Зададим число точек N = 1000, h = 1/100. Начальное приближение вектора параметров — θˆ1 = 1, θˆ2 = 1.
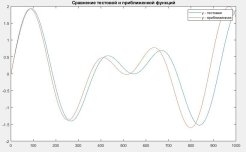
а) МНК.б) «Полоска»

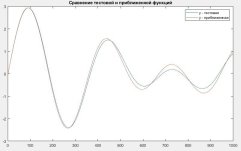
а) МНК.б) «Полоска».


Известно, что МНК дает хорошую точность с помехами статистического характера. В нашей задаче помехи имеют хаотический характер, что не подходит для МНК. Поэтому приближение МНК получается хуже, чем алгоритмом «Полоска».
6. Заключение
Для решения задачи определения неизвестных параметров с заданной точностью в полигармоническом сигнале с ограниченной помехой был применен метод рекуррентных целевых неравенств, а точнее, алгоритм «Полоска». Выбранный нами алгоритм показал высокую точность определения параметров, и оценочная модель сигнала имела отклонение менее 1 процента. Дальнейшее исследование может быть посвящено оценке параметров сигнала при неизвестном n .
Литература:
- Якубович В. А. (1966) Рекуррентные конечно сходящиеся алгоритмы решения систем неравенств // Докл. АН СССР. Т166. № 6. С. 1308–1311.
- Якубович В. А. (1969) Конечно сходящиеся алгоритмы решения счетных систем неравенств и их применение в задачах синтеза адаптивных систем // Докл. АН СССР. Т189. № 3. С. 495–498.
- Фомин В. Н. (1976) Математическая теория обучаемых опознающих систем. Л.: Изд-во ЛГУ.
- Фомин В. Н., Фрадков А. Л., Якубович В. А. (1981) Адаптивное управление динамическими объектами. М.: Наука.
- Фрадков А. Л. (1990) Адаптивное управление в сложных системах. М.: Наука.
- Андриевский Б. Р., Фрадков А. Л. (2001) Элементы математического моделирования в программных средах MATLAB 5 и Scilab. СПб.: Наука.


