Работа представляет собой исследование методов расчета параметров схемы замещения асинхронного двигателя по данным каталога производителя и анализ результатов моделирования по этим расчетам в MATLAB Simulink.
Ключевые слова: расчет, параметры схемы замещения, асинхронный двигатель, каталожные данные, MATLAB Simulink.
Асинхронные двигатели получили широкое применение во всех отраслях промышленности, поскольку они обладают относительно невысокой стоимостью и намного проще в обслуживании, чем двигатели постоянного тока. Вследствие этого для изучения поведения асинхронных двигателей существуют различные способы моделирования процессов, происходящих при их работе. Конечно, есть более наглядный и реальный способ изучения — использование лабораторных стендов в учебных заведениях. Однако пользование лабораторными стендами ограничено по времени, поскольку их в учебном заведении не бесчисленное количество и при проведении работ необходимо присутствие ответственного лица — преподавателя или лаборанта. Также моделирование позволяет изучить процессы, происходящие в любом желаемом двигателе, для расчета параметров схемы замещения которого необходимы только каталожные данные, предоставляемые производителем. В данной статье и будут рассмотрены различные способы расчета параметров схемы замещения асинхронных двигателей.
Как было сказано ранее, параметры схемы замещения, необходимые для моделирования, возможно рассчитать при помощи каталожных данных двигателя, предоставляемых производителями асинхронных двигателей. Данные способы не претендуют на высокую точность результатов моделирования, но позволяют довольно достоверно оценить даже переходные процессы в двигателях. Конечно, существуют более точные способы расчета, которые позволяют производить более точное моделирование, однако они требуют большего количества данных асинхронной машины, которые обычно не предоставляются современными производителями. Например, в справочнике [2] имеются все параметры схемы замещения, однако данный справочник описывает определенную серию двигателей советского производства, которые не всегда могут являться исследуемым двигателем, хотя и обладают высокой распространенностью на территории России.
Для осуществления моделирования используется компьютерная программа MATLAB Simulink. Данная программа с огромным количеством прикладных пакетов позволяет проводить исследования в различных сферах науки от нейронных сетей до моделирования финансовых прогнозов. Также есть дополнительный пакет SimPowerSystems содержащий в себе большое количество готовых блоков для разрабатывания схем моделирования работы электрических систем. Схема моделирования представлена на рисунке ниже.
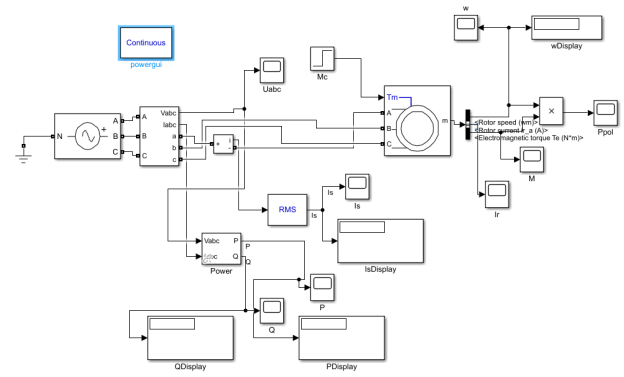
Рис. 1. Схема моделирования в MATLAB
Исследуемым двигателем был выбран двигатель высокой мощности и высокого питающего напряжения по следующим причинам:
- Двигатели высокой мощности невозможно исследовать на лабораторных стендах ввиду их отсутствия, поскольку они являются очень дорогими устройствами.
- Проверить возможность расчета параметров схемы замещения по каталожным данным достоверно отображать поведение двигателей при моделировании, так как обычно этими методами исследуются двигатели средней мощности и питанием напряжения от сети 380 Вольт.
Каталожные параметры исследуемого двигателя, питающегося от сети напряжением Uлн=10000 Вольт и частотой f1=50 Герц приведены в таблице ниже:
Таблица 1
Паспортные данные асинхронного двигателя Siemens 1RA4 452–4HE80
|
|
|
|
|
|
|
|
|
|
|
1120 |
1485 |
95.5 |
0.9 |
75 |
5.5 |
0.7 |
2.2 |
23 |
Все расчеты и моделирование производится в абсолютных единицах. Первый метод расчета [1] описан ниже выражениями 1–11:
Номинальная скорость АД:
![]() (1)
(1)
Номинальный момент АД:
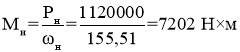 (2)
(2)
Критический момент АД:
![]() (3)
(3)
Пусковой момент АД:![]()
![]() (4)
(4)
Критическое и номинальное скольжение АД:
 (5)
(5)
![]() (6)
(6)
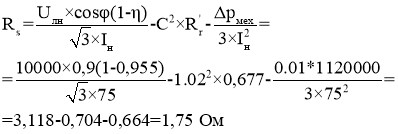
Активные сопротивления статора и приведенное ротора АД:
 (7)
(7)
 (8)
(8)
Индуктивность рассеяния статора и приведенная ротора:
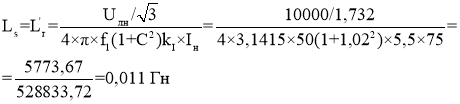 (9)
(9)
 (10)
(10)
Коэффициент приведения:
 (11)
(11)
Значение механических потерь было выбрано согласно выражению ![]() = 1.01–1.05(PH), где меньшее значение соответствует машинам большей мощности. Ниже на рисунках приведены графики тока статора, угловой скорости ротора и момента на валу двигателя от времени.
= 1.01–1.05(PH), где меньшее значение соответствует машинам большей мощности. Ниже на рисунках приведены графики тока статора, угловой скорости ротора и момента на валу двигателя от времени.
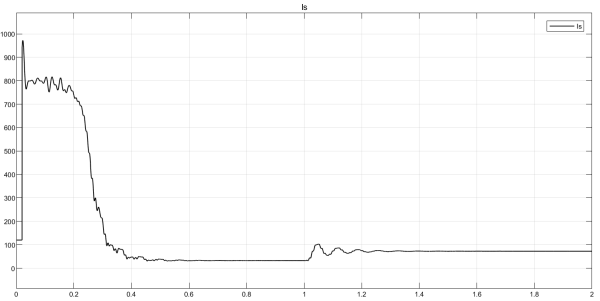
Рис. 2. График тока статора от времени
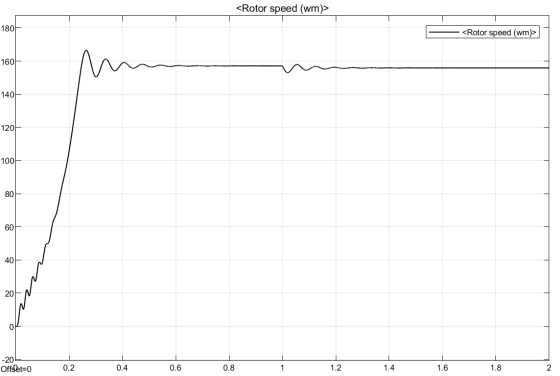
Рис. 3. График угловой скорости ротора от времени
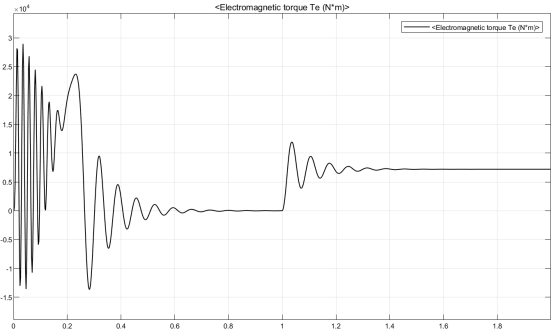
Рис. 4. График момента на валу от времени
Также для наглядности сведем основные измеренные значения в сравнительную таблицу с каталожными и расчетными данными двигателя.
Таблица 2
Расчетные исмоделированные значения
|
Параметры |
|
|
|
|
|
|
Расчетное |
155.51 |
7202 |
75 |
412,5 |
15840 |
|
Смоделированное |
155.8 |
7195 |
76,5 |
800 |
23720 |
Исходя из данных таблицы можно сделать вывод, что номинальные значения в установившемся режиме работы двигателя получаются при моделировании с высокой точностью, однако значения максимального момента и пускового тока сильно отличаются от расчетных.
Перейдем к следующему методу расчету [3]. Такие значения как ![]() рассчитываются тем же образом, что и в первом методе, поэтому возможно сразу их использовать в расчете.
рассчитываются тем же образом, что и в первом методе, поэтому возможно сразу их использовать в расчете.
Механические потери:
 (12)
(12)
Активное сопротивление статора:
 (14)
(14)
Активное сопротивление ротора:
 (15)
(15)
Индуктивность статора и ротора:
 (16)
(16)
Индуктивность рассеяния статора и ротора:
 (17)
(17)
Взаимоиндукция:
![]() (18)
(18)
Коэффициент приведения:
 (19)
(19)
Коэффициент вязкого трения:
 (20)
(20)
Произведём моделирование. Результаты моделирования в виде графиков и таблицы значений расположены ниже.
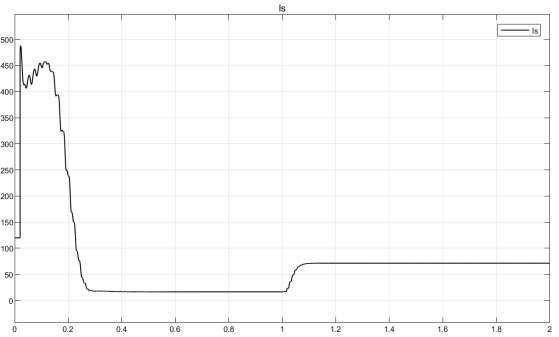
Рис. 5. График токастатора от времени
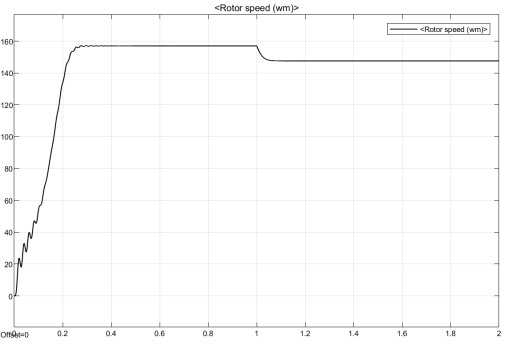
Рис.6. График угловой скорости ротора от времени
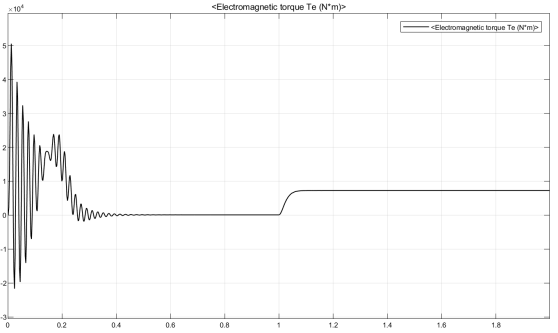
Рис. 7. График момента на валу от времени
Таблица 3
Расчетные исмоделированные значения
|
Параметры |
|
|
|
|
|
|
Расчетное |
155,51 |
7202 |
75 |
412,5 |
15840 |
|
Смоделированное |
147,6 |
7255 |
71,5 |
440 |
23860 |
При данном расчете, смоделированные номинальные значения угловой скорости ротора и тока статора обладают более высокой погрешностью, около 5 %. Однако при этом значение пускового тока обладает погрешностью всего в 6 %, в отличии от предыдущего метода, в котором смоделированное значение пускового тока превышало расчетное примерно в два раза.
Результаты моделирования и сравнения двух методов:
- Данные методы позволяют моделировать работу двигателя высокой мощности при номинальной нагрузке с достаточной точностью в MATLAB Simulink;
- Один из методов позволяет предсказывать значение пускового тока, однако ни один из методов достоверно не отображает значение критического момента.
Литература:
- Герман-Галкин, С. Г. Электрические машины: Лабораторные работы на ПК / С. Г. Герман-Галкин, Г. А. Кардонов. — Санкт-Петербург: КОРОНА принт, 2003. — 256 c.
- Кравчик, A. Э. Асинхронные двигатели серии 4А / A. Э. Кравчик, М. М. Шлаф, В. И. Афонин, Е. А. Солобенская. — Москва: Энергоиздат, 1982. — 504 c.
- Дементьев Ю. Н. Компьютерное моделирование электромеханических систем постоянного и переменного тока в среде MATLAB Simulink: учебное пособие / Ю. Н. Дементьев, В. Б. Терехин, И. Г. Однокопылов, В. М. Рулевский; Томский политехнический университет. — Томск: Изд-во Томского политехнического университета, 2018. — 497 с

