Автором статьи разработан оригинальный метод компьютерного моделирования высокой детализации (КМВД), который позволяет решать задачи моделирования динамических систем и механизмов любой сложности. С помощью этого метода построены работающие динамические модели механизмов, которые участвуют в управлении поведением автономного робота, а также схемотехнические решения, позволяющие ответить на вопросы самостоятельного обучения. Кроме того, КМВД позволяет решать задачи по созданию механизмов распознавания образов, принятия решений, обучения и многие другие. Новый метод моделирования и управления относится к прорывным технологиям, в котором реализован алгоритм параллельных вычислений для каждого программного цикла, что позволяет многократно увеличить эффективность процессов моделирования и за счёт использования универсального динамического элемента (инкана) отслеживать исследуемые процессы в реальном времени.
Ключевые слова: компьютерное моделирование, динамические системы, самообучение, роботы, распознавание образов, инкан, универсальный динамический элемент, виртуальная жидкость, параллельный пересчёт, нейрон, сложные системы.
Введение
Несмотря на распространённость и очевидные достоинства дифференциальных уравнений, их недостатками при моделировании сложных динамических систем являются:
– малая точность,
– систематическое накопление ошибок,
– недостаточная наглядность динамических процессов,
– сложность контроля и управления системой и при увеличении числа дифференциальных уравнений,
– увеличение времени счёта при уменьшении шага интегрирования.
Разработанный метод компьютерного моделирования высокой детализации (КМВД) можно использовать для исследования сложных механизмов в биологии и других естественных науках. Метод основан на применении универсального динамического элемента (инкана), с помощью которого можно создавать качественные модели механизмов, практически любой сложности, а также раскрывать причинно-следственные связи исследуемых процессов. Моделирование выполняется по оригинальному методу с уникальной технологией, в которой не используется пересчёт дифференциальных уравнений.
Основная часть
Целью и задачей разработки универсального динамического элемента (УДЭ) является устранение недостатков, связанных с несовершенством известных методов моделирования, создание универсального элемента, позволяющего реализовывать на его основе динамические системы и механизмы практически неограниченной сложности, а также повысить эффективность процесса компьютерного моделирования за счёт:
– увеличения скорости вычислений,
– непрерывности исследуемого процесса во времени,
– возможности вмешиваться в ход эксперимента,
– возможности неограниченно увеличивать сложность моделирования динамических механизмов,
– отказа от использования «тяжеловесных” модулей, которые требуют сложное управление и программирование,
– повышения быстродействия, которое достигается за счёт отказа от пересчёта дифференциальных уравнений,
– замены плохоформализуемых и неудобочитаемых формул из дифференциальных уравнений на более наглядные блок-схемы,
– возможности создавать новые типы устройств, используя только УДЭ (инкан).
Данная задача решается за счёт того, что универсальный динамический элемент (УДЭ) может быть выполнен как программным способом, так и при помощи микропроцессорных устройств. Универсальность инкана заключается в том, что на базе одного УДЭ можно построить разные инструменты для моделирования: компаратор, усилитель, схемы совпадения, счётчик, ЛВП, триггер, мультивибратор и другие.
Одним из замечательных свойств моделирования на УДЭ является возможность реализовать параллельный пересчёт значений всех инканов на одном процессоре (за один программный цикл), что обеспечивает синхронную работу всех элементов в реальном времени.
Кроме этого, применение инканов, обеспечивает стопроцентную совместимость любых узлов и механизмов между собой и на любом этапе разработки. Используя инканы нет необходимости применять индивидуальные генераторы функций. Функции синуса, экспоненты можно получить на инкане. УДЭ заменяет все типы простых динамических звеньев, таких как: буферное, усилительное, инерционное, интегрирующее, дифференцирующее, звено запаздывания и т. д.
Компьютерное моделирование высокой детализации относится к низкоуровневому моделированию, которое позволяет создавать динамические механизмы любой сложности и детализации. С помощью низкоуровневого моделирования на инкане можно создавать и изучать самые тонкие, интимные механизмы природы, доступ к которым для других методов моделирования закрыт.
Необходимость в создании низкоуровневого языка моделирования существует с момента создания вычислительной техники, так как этот метод открывает неограниченные перспективы в исследовании всех природных явлений, а также даёт возможность изменить взгляды на принципы работы нейронов и всей нервной системы.
Чтобы начать моделировать динамические системы (а нервная система это тоже динамическая система) нужно изучить свойства и особенности инкана. Инкан — это тот кирпичик, из которого можно построить модель любого сложного механизма.
Графически инкан изображается в виде прямоугольника, к которому присоединены верхнее плечо и нижнее плечо. На плечи инкана будут подаваться управляющие сигналы.
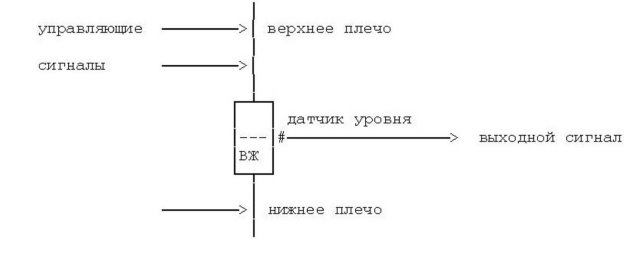
Рис.1. Графическое изображение инкана
Выходной сигнал определяется тем уровнем виртуальной жидкости (ВЖ), который содержится в инкане.
В отличии от математического интегратора, который интегрирует энергию входного информационного сигнала, инкан интегрирует виртуальную жидкость (ВЖ), скорость поступления которой управляется входным сигналом. Масса виртуальной жидкости M(t) будет определяться её накоплением в инкане, которая остаётся от разницы токов притока и стока:
M(t) = +f1(t) -f2(t)
В этом нет ничего удивительного, но на этом принципе можно построить алгоритм работы программного универсального динамического элемента (инкана).
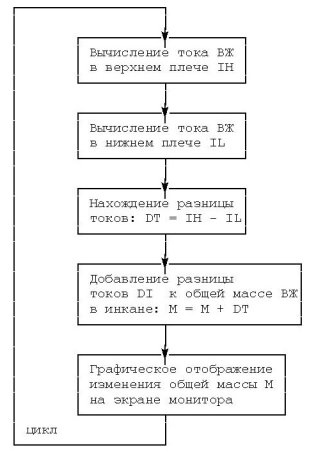
Рис.2. Алгоритм работы универсального динамического элемента
Любую, сколь угодно сложную систему, можно смоделировать используя ограниченное (счётное) число базовых схем, таких как:
– буфер (повторитель),
– инвертор,
– ключ,
– компаратор (датчик),
– триггер,
– счётчик,
– мультивибратор,
– Линейка Вариации Параметра (ЛВП),
– Критический Период Восприятия (КПВ)
и некоторые другие схемы (вспомогательные), которые используются на практике не очень часто, например, схемы совпадения.
Основные свойства инкана
В инкане приток и сток виртуальной жидкости может осуществляться независимо друг от друга, т. е. управление заслонкой Истока не зависит от управления заслонкой Стока. На первый взгляд может показаться, что это тривиальный тезис, но на самом деле этот принцип позволяет расширить возможности классического интегратора.
Изменяя степень влияния управляющих функций на проводимости верхнего плеча или нижнего плеча можно изменять скорость заполнения интегратора виртуальной жидкостью, что позволяет управлять инерционностью инкана. Увеличивая или уменьшая проводимость нижнего плеча в инкане можно соответственно либо «тормозить» либо «активировать» уже идущий процесс в динамической системе.
Применение инкана — как Универсального Динамического Элемента (УДЭ) позволяет повысить быстродействие, которое достигается за счёт отказа от пересчёта дифференциальных уравнений. Это свойство позволяет отказаться от использования быстродействующих компьютеров для моделирования сложных динамических систем.
Кроме того, применение инкана позволяет повысить точность решения, что помогает в точной настройке сложных и очень сложных схем.
На базе только одного УДЭ можно построить разные типы устройств, за счёт изменения его свойств, например:
– компаратор,
– усилитель (буфер),
– мультивибратор,
– инвертор,
– схемы совпадения,
– RS триггер,
– схемы задержки и т. д.
Изменение свойств УДЭ можно обеспечить изменением его основных параметров, таких как: скорость Тока Притока, скорость Тока Стока, включение дополнительных связей и т. д.
Применение инкана позволяет использовать только простые функции. Все сложные функции можно либо обойти, либо сформировать из простых, таких как: линейная, ступенчатая, единичный строб.
Если соединить Буфер входного сигнала с компаратором, то получится схема очень похожая на работу биологического нейрона, которая иллюстрирует правило «Всё или ничего»:
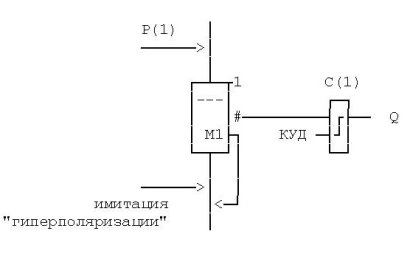
Рис.3. Схема, имитирующая работу биологического нейрона
Необходимо заметить, что недостатком «классической» модели искусственного нейрона является то, что она не принимает во внимание задержки во времени, которые воздействуют на динамику системы (инерционность). Входные сигналы сразу же формируют выходной сигнал. Этого недостатка лишена схема, построенная на инкане и изображённая на Рис. 3. Если на вход Р(1) поступает сигнал ниже критического уровня деполяризации (КУД), то сигнал Q на выходе компаратора не формируется, а если Р(1) превышает КУП, то на выходе формируется «потенциал действия».
Инерционность инкана определяется временем, которое необходимо буферу, чтобы его уровень достиг двух третьих от уровня входного сигнала. Измеряется инерционность в секундах или тактах.
Характерные свойства КМВД на инкане:
– Инкан отличается от классического интегратора, используемого в схемотехнике, тем, что может сколь угодно долго удерживать свой заряд или уровень.
– Все моделируемые процессы происходят в реальном времени. Время непрерывно.
– Простота, наглядность и эффективность построения сложных динамических схем.
– Линейность входных сигналов. Управление инканом осуществляется простыми сигналами: линейными, ступенчатыми, импульсными.
– Аддитивность — возможность сложения входных сигналов для каждого плеча.
– Нет зависимости от размерности исследуемых процессов.
– Возможность неограниченного наращивания элементов в исследуемой модели, без снижения качества моделируемого процесса. Применение инканов допускает неограниченное увеличение элементарных модулей.
– Высокая точность и быстрота нахождения решения.
– Возможность вмешиваться в исследуемый процесс и управлять им в реальном времени.
– Высокое быстродействие. Моделирование на инканах не требует высокоскоростных компьютеров.
– Отслеживание исследуемого процесса в реальном времени.
Моделирование сложных динамических механизмов начинается с разработки и построения графический схемы, основным элементом в которой является инкан. Количество инканов в каждой схеме может быть любым: от одного до сотен тысяч, насколько разработчику хватит ума и фантазии.
Разработка компьютерной модели осуществляется после постановки задачи и полного словесного описания работы изучаемого механизма. Результатом работы является построение динамических моделей с выявлением наиболее существенных факторов и закономерностей, позволяющих прогнозировать состояния системы под действием различных факторов.
После составления графической схемы, её данные заносятся в программу, которая пересчитывает значения для каждого УДЭ и выводит их на экран монитора. В процессе моделирования можно перманентно вносить изменения в схему, изменять количество УДЭ, редактировать любые параметры и т. д.
Главное преимущество КМВД — это возможность абстрагировать любой механизм или элемент в образе инкана. Что это значит? К примеру, собирая какой-либо динамический механизм, инженер использует моторы, потенциометры, заслонки, фильтры, рычаги и различные другие элементы, из которых может состоять устройство. Так вот, при моделировании в КМВД, обращаться к любому из этих элементов можно одним и тем же способом, как к обычному инкану.
Заключение
Уникальность метода состоит в разработке новой технологии, которая не имеет аналогов в мировой практике моделирования. На сегодняшний день все известные пакеты динамического моделирования используют принцип пересчёта алгебро-дифференциальных уравнений — принцип, который давно устарел и не позволяет в полной мере использовать возможности компьютерного моделирования и управления сложными механизмами.
На основе динамического элемента можно строить любые произвольные объекты, свойства которых будет задавать сам разработчик! КМВД не требует высокоскоростных компьютеров и может быть использован в разработке программ на базе микропроцессорной техники, что позволяет создавать сложные механизмы управления передвижными роботами, автономными агентами, дронами и т. д.
Основные области применения КМВД:
– Компьютерное моделирование технических и физических процессов,
– Построение и алгоритмизация компьютерных моделей в медицине, биологии,
– Нелинейные процессы и самоорганизация в биологических системах (роль гомеостаза в адаптации),
– Построение моделей нелинейных систем и систем автономного управления,
– Разработка методов сбора и обработки зрительных данных в задачах анализа движения объектов,
– Алгоритмы распознавания образов, обработки изображений и биометрической информации,
– Алгоритмы обработки информации в реальном времени,
– Алгоритмы энергораспределения и энергоснабжения,
– Алгоритмы и механизмы управления роботами и автономными агентами.
Также с помощью метода КМВД могут решаться задачи, связанные с автономным обучением роботов, стабилизацией ракеты при посадке, программировании игр, распознаванием аномальной работы двигателей и многие другие.
Литература:
- Канарейкин А. В. Самообучение автономного робота с использованием метода компьютерного моделирования высокой детализации КМВД. СПб. Страта. 2019.
- Канарейкин А. В. Свидетельство ГРПЭВМ № 2017661336. Программа моделирования динамического элемента (инкана).
- Канарейкин А. В. Свидетельство ГРПЭВМ № 2018660306. Программа, реализующая метод компьютерного моделирования динамических систем и механизмов на инкане (метод высокой детализации).

