Бұл мақалада біз белгісіз роботты белгісіз кіріспен кіру қанықтылығы бар манипуляторды басқару, масштабтау мен бұзылулар мәселесін қарастырамыз. Осы мақсатта кірісті өңдеу үшін адаптивті басқару моделі (MRAC-тәрізді) қолданылады.Модельге сілтеме тұрақты күйге кіреді (ISS) және қажетті басқару сигналдарының арасындағы қателіктер арқылы басқарылады. Белгісіз параметрлер роботты динамиканың сызықтық-параметрлік қасиетін қолдану арқылы шешіледі. Белгісіз енгізу масштабтары мен бұзылулар регрессорлық емес тәсілмен өңделеді. Біздің дизайн барлық сигналдардың кіруін қамтамасыз етеді.
Яғни, жабық цикл жүйесі шектелген, ал бақылау қатесі алдын ала анықталғанға байланысты ықшам жинаққа ауысады. Жұмыстың тиімділігін көрсету үшін екі буыны бар жазықтық шынтақ манипуляторында модельдеу ұсынылған.
Түйінді сөздер: робот-манипулятор, бейімделгіш басқару, белгісіз параметр, енгізу қанықтылығы, траекторияны бақылау.
В этой статье мы решаем проблему управления неопределенным роботом-манипулятором с входными насыщениями, масштабирование и возмущения неизвестными входными данными. Для обработки входных данных используется эталонное адаптивное управление модели (подобное MRAC). Эталонная модель вводится в состояние стабильной (МКС) и управляется ошибками между требуемыми сигналами управления и входные насыщения. Неопределенные параметры обрабатываются с помощью свойства линейной в параметрах роботизированной динамики, в то время как неизвестные входные масштабирования и помехи обрабатываются не регрессорным подходом. Наш дизайн гарантирует, что все сигналы в замкнутых системах ограничена, и ошибка отслеживания сходится к компактному набору, который зависит от заданного границы управляющих входов. Моделирование на плоском локтевом манипуляторе с двумя суставами предоставлено для иллюстрации эффективности предлагаемого контроллера.
Ключевые слова: робот-манипулятор, адаптивное управление, неопределенный параметр, входная насыщенность, отслеживание траектории.
Роботты манипуляторды автоматты басқару және робототехника саласына көңіл бөлу және осы саладағы артықшылықтарға байланысты үлкен нәтижеге қол жеткізді [1–5]. Роботтардың динамикалық моделін жасау жоғары сызықтық емес және белгісіз дәл жүктемелерге байланысты, сонымен қатар роботтар әдетте физикалық жағдайлар мен кірістер арқылы шектеледі. Берілу механизмдеріне байланысты масштабтау анық емес болып келеді [6–9]. Белгісіздік пен бұзушылықты елемеудің кесірінен шектеулердің орын алуы мүмкін немесе жүйе зақымдалады. Бұл жұмыста біз анықталмаған робот манипуляторды басқару, яғни енгізу қанықтылығын, белгісіз енгізу масштабын ескеру және бұзылулар мәселесін қарастырамыз.
Жоғарыда аталған мәселенің бірінші ерекшелігі — оны шешу үшін кіріс қанықтылығы қолданамыз. Қолданыстағы тәсілге негізделген кіріспен басқарудың оңтайлы есебін шешу туралы шектеулер ұсынылды. Балама тәсіл қанықтыру функциялары туралы түсінікке негізделген. Осы жұмыстарда көрсетілгендей, траектория үшін бақылау немесе шығыс бақылау мәселесі, бастапқы шекаралас аймақта болу шарттары, қажетті енгізу қанықтылығының қанағаттануын қамтамасыз етеді. Бұл алынған жүйе тек жергілікті жерде жұмыс істей алатынын білдіреді.
Екінші ерекшелік — белгісіздікпен күресу жүйенің параметрлері. Қосылу себебінен модельдегі айнымалылар мен белгісіз параметрлер, атап айтқанда, инерция, кориолис және центрифугал күштерінің матрицалары, белгісіз параметрді бағалау үшін қалыптастырушылар регрессордың тәсілін ұсынды. Осы тәсіл негізінде бірнеше бейімдеу, басқару элементтері бар адаптивті басқару, бейімділікке негізделген адаптивті басқару және екі тәсіл арасындағы аралық басқарудың кері динамикасы болатындай етіп жасалған. Алайда, кіріс қанықтылығы ескерілгенде, белгісіз параметрлердің екеуін де бір уақытта өңдеу және кіріс шектеулері үшін проблема болып табылады. Қолданыстағы тәсілдерге байланысты шектеулер тікелей қолданылмауы мүмкін. Сонымен қатар, кіріс масштабы болған кезде белгісіз және бұзылулар жүйеге, басқаруға әсер етеді, сол кезде проблема күрделене түседі. Ғаламдық тұрақтылық тек белгіленген мақсатқа жету үшін қолданылады.
Мәселені тұжырымдау
Бұл жұмыста біз сипатталған робот манипуляторды келесі теңдеулер бойынша зерттейміз [6]:
D (q) q¨ + C (q, q˙) q˙ + G (q) = Ψu + w, (1)
| ui | u¯i, i = 1,..., n, (2)
мұндағы q ∈ Rn — жалпыланған координаталардың векторы;
u ∈ Rn — шектеуді қанағаттандыратын басқару кірістерінің векторы(2);
u¯i> 0, i = 1,..., n — оң сан;
D ∈ Rn × n симметриялы оң инерция матрицасы;
C ∈ Rn × n — бұл Кориолис және центрифугалық күштер матрицасы;
G ∈ Rn — бұл тартылыс күші;
Ψ ∈ Rn × n — белгісіз кіріс матрицасын масштабтау;
w ∈ Rn — бұл вектор, бірақ белгілі бір байланыста, яғни оң саны бар, яғни w w¯.
Бұл жұмыста барлық жүйе кері байланыс үшін қол жетімді. Осы жұмыстың бақылау мақсаттары:
1) Қажетті траектория qd (t) ∈ Rn барлық сигналдар кезінде тұйық цикл жүйесі шектелген және бақыланған.
2) Мұндағы басқару мәселесінің өзгешелігі байқалады [8]. Бақылау шектеулі болғандықтан шектеу (2) қанағаттандырылады және бұзу w қосылады. Салыстыру [8] -дегі бар жұмыстары мен белгісіз енгізу масштабы бұл жерде мәселені қиындатады. Басқару дизайнын жасамас бұрын туындаған келесі қиындықтырды шешіп алу қажет. Яғни, позицияны бақылау мәселесі көрсетілген [13].
Басқару дизайны
Бұл бөлімде адаптивтің басқару дизайны берілген (1) және (2) жүйелер үшін шектеулі басқару. Осы кезде біз бақылау қатесін анықтаймыз:
p = q — qd, (3)
және сүзгіленген жылдамдық айнымалысы
r = p˙ + Λp, (4)
мұндағы Λ ∈ Rn × n оң диагональды матрица. Егер r шекарасы болса, онда (p, p˙) шекараланады. Сонымен қатар r → 0 білдіреді (p, p˙) → 0. Тиісінше, қабылдау (4) бойындағы (4) уақыт туындысынан динамиканы теңдеу r ретінде аламыз:
D (q) r˙ = — C (q, q˙) r + Ψu + w — D (q) (q¨d — Λp˙) — C (q, q˙) (q˙d — Λp) — G (q). (5)
D (q), C (q, q˙) және G (q) in (5) белгілері белгісіз, біз осы белгісіздіктерді регрессорды қолдана отырып шешеміз, сонда матрица келесідей болады. Белгілеу
w= q˙d — Λ (6)
1-мүліктің iii) тармағын қолдана отырып, бізде бар
Y (q, ˙ q,) θ = D (q) ˙ + C (q, q˙) + G (q), (7)
мұндағы θ ∈ R — белгісіз параметрлер векторы және Y (q, q˙,) ∈ Rn × белгілі функция регрессоры. Содан кейін біз (5) ретінде қайта жазамыз:
D (q) r˙ = — C (q, q˙) r — Yθ + Ψu + w. (8)
(8) -ға байланысты, Ψ белгісіз және u шектеулі болғандықтан (2) арқылы, әдеттегі бейімделу тәсілдері [8] тармақтарында тікелей қолдануға болмайды.
Модельдеу нәтижелері
Ұсынылған бақылаудың тиімділігін көрсету үшін, біз модельді шынтақ
манипуляторын суретте көрсетілгендей екі төңкерілген буынмен жасаймыз
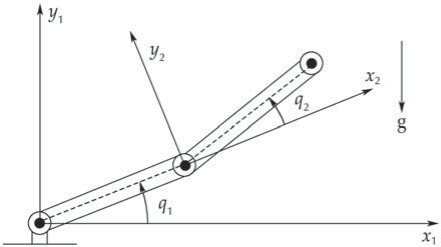
Сурет 1. Екі төңкерілген қосалқы шынтақ манипуляторы
Қорытынды
Бұл жұмыста біз кіріс қанықтылығы бар робот манипулятор, белгісіз кіріс масштабы және сыртқы бұзылулар белгісіздікті шешуді ұсындық. Біріншіден, белгісіздік роботтың динамикасы белгілі функция регрессоры қолдану арқылы өңделеді. Екіншіден, кіру қанықтылығымен күресу үшін MRAC- ты енгіздік. Соңында, белгісіз кіріс масштабы және сыртқы бұзылулар регрессорлық емес тәсілмен қабылданбады.
Нәтижесінде, контроллер кіріс қанықтылығын қанағаттандырды және бақылау қателіктерінің конвергенциясына қол жеткізді. Кіріс қанықтылығына байланысты аймақты модельдеу, басқару мақсаттарының аяқталғанын көрсетеді.
Әдебиет:
- Ф. Л. Льюис, Д. М. Доусон, C. Т. Абдалла. Робот манипуляторы. Бақылау: Теория және практика. 2-ші басылым. Нью-Йорк: Марсель Деккер Inc., 2004.
- М. В. Спонг, С. Хатчинсон, М. Видясагар. Роботты модельдеу және Бақылау. Нью-Йорк: Джон Уили и Сонс, 2005.
- Хи. Берік бейімделу, кеме динамикасы бар икемді теңіз көтергішінің шекаралық бақылауы. Автоматика, 2011, 47 (4): 722–732.
- Хи. Нейрондық желіні роботының күйінің нәтижелері бойынша басқаруды қалпына келтіру,. Журнал Интеллектуалды және роботты жүйелер, 2015, 80 (1): 15–31.
- Хи, Занг. Істің берік адаптивті басқаруы позицияларына арналған көмек жүйесі. Автоматика, 2014, 50 (7): 1843–1851 жыл.
- Х.Бергуис, Р.Ортега, Х.Неймейер. Берік бейімделетін робот контроллер. IEEE робототехника және автоматика бойынша операциялар, 1993 ж., 9 (6): 825–830.
- E. В. Пантелей, А. А. Стоцкий. Адаптивті траектория / робот манипуляторлардың схемасы. Халықаралық журнал адаптивті басқару және сигналдарды өңдеу, 1993 ж., 7 (6): 489–496.
- S. S. Ge. Екі динамикасы бар роботтарды адаптивті басқару параметр белгісіздігі және белгісіз енгізу масштабы. Мехатроника, 1996, 6 (5): 557–569. [9] T. T. Tран. Роботты адаптивті басқару белгісіздігі мен енгізу қанықтылығы бар манипулятор. IEEE Мехатроника және автоматика бойынша халықаралық конференция (ICMA), Пекин: IEEE, 2015: 1525–1530.

