




В современном мире все большую популярность приобретают устройства, в составе которых используется шаговый двигатель (ШД), это обусловлено достаточно простым управлением скоростью вращения, а также возможностью точного углового позиционирования положения вала. ШД используется в принтерах, сканерах, факсах, световом оборудовании, а также в разнообразном промышленном и специальном оборудовании, например в станках ЧПУ. Очень широкое применение ШД нашли в робототехнике, автомобилестроении.
Задача состоит в экспериментальном определении оптимальных частот переключения микрошаговых режимов двигателей. Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которой двигатель перестает, вращается стабильно. Определение частот необходимо произвести при постоянном напряжении питания драйвера 4,5В, на сам ШД подаем 16,4В. При этом граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
В исследовательской работе использовали гибридный ШД, который сочетает в себе больший удерживающий и динамический крутящий момент, чем ШД с переменным или постоянным магнитом. Ротор имеет зубцы, расположенные в осевом направлении и он разделен на две части, внутри ротора расположен цилиндрический постоянный магнит. Зубцы верхней половины являются северным магнитным полюсом, а другая половина южным. Особенность ШД в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи. [1]
Чтобы упростить процесс управления ШД существуют соответствующие драйверы. Драйвер — представляет собой электрическую цепь или другой электронный компонент, предназначенный для преобразования электрических сигналов. Драйвер используется для управления биполярным шаговым двигателем с полным шагом, половинным и микрошагом, а также для регулирования тока, протекающего через цепь и направлением вращения двигателя. В данной работе использовался драйвер, созданный на базе микросхемы А4988.
Рабочее место: генератор сигналов произвольной формы HMF 2550, источник питания ATH-1333–2 шт, шаговый двигатель MT-1703HD200AW, драйвер А4988.
ШД имеет размер шага 1,8° (что соответствует 200 шагам на оборот). Драйвер А4988 позволяет работать с микрошагом. Выбор микрошага устанавливается при помощи входов драйвера MS1, MS2, MS3, при подаче соответствующих логических уровней можно организовать пять различных шаговых режимов представленных в таблице 1.
Таблица 1
Микрошаговые режимы А4988
|
Разрешение микрошагов |
MS1 |
MS2 |
MS3 |
Угол поворота на шаге |
|
Полный шаг |
«0» |
«0» |
«0» |
1.8° |
|
Половина шага |
«1» |
«0» |
«0» |
0.9° |
|
Четверть шага |
«0» |
«1» |
«0» |
0.45° |
|
Одна восьмая шага |
«1» |
«1» |
«0» |
0.225° |
|
Одна шестнадцатая шага |
«1» |
«1» |
«1» |
0.1125° |
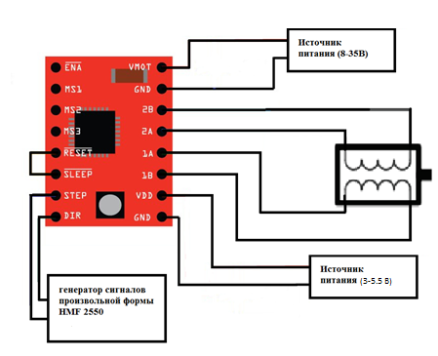
Рис. 1. Схема установки
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR». Каждый импульс, поступающий на вход «STEP» соответствует одному микрошагу ШД в направлении, выбранном с помощью «DIR».
Для разрешения работы драйвера, нужно установить уровень логического «0» на вход «ENABLE». Провода первой обмотки шагового двигателя подключаются к выводам драйвера 1А, 1В, второй обмотки к выводам 2А, 2В.
В таблице — 2, при напряжении питания драйвера 4,5В, разгоняем ШД плавно от стабильного запуска и до частоты срыва, для различных микрошагов. Определили предельное значение частоты, при которой ШД стабильно запускается.
Таблица 2
Частоты запуска исрыва ШД
|
Назначение микрошага |
Оптимальная частота плавного перехода при 4.5 В |
Предельное значение запуска ШД |
|
|
запуск |
предел |
||
|
Полный шаг |
850 Гц / 255 об/мин |
9000 Гц / 2700 об/мин |
1000 Гц |
|
Половина шага |
1500 Гц / 450 об/мин |
2560 Гц / 768 об/мин |
2500 Гц |
|
Четверть шага |
3050 Гц / 915 об/мин |
31500 Гц / 9450 об/мин |
4500 Гц |
|
Одна восьмая шага |
6200 Гц / 1 860 об/мин |
91100 Гц / 27330 об/мин |
7900 Гц |
|
Одна шестнадцатая шага |
12500 Гц / 3750 об/мин |
192300 Гц / 57690 об/мин |
15300 Гц |
Чтобы момент на валу был больше, нужно использовать как можно меньший шаг, то есть микрошаги не оказывают никакого негативного влияния на крутящий момент.
Для управления ШД была написана программа на языке программирования С++. С помощью драйвера А4988 формировали импульсы. Для установки шага использовали три сигнала MS1, MS2, MS3. [2]
Подберем шаги и значения для ШИМ для разных частот вращения. ШИМ по отношению к процессору внешняя система, которая формирует сигнал. Зная, на каких оборотах, работает ШД, можно рассчитать число для ШИМ модулятора.
Найдем по формуле число для ШИМ модулятора N
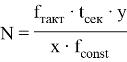
Где fтакт — частота кварцевого генератора 50 МГц;
x — обороты в минуту;
fconst=200 Гц,
tсек=60 секунд;
y — микрошаги;
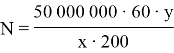
Подставим значения:
Один выход у контроллера, который может менять его шаги. Управляя одним сигналом можно менять только одно число.
|
Разрешение микрошага |
MS1 |
MS2 |
MS3 |
|
Полный шаг |
«0» |
«0» |
«0» |
|
Четверть шага |
«0» |
«1» |
«0» |
Возьмем в пример полный шаг и четверть шага. Меняется только вход MS2.
˃ 2700 об/мин — полный шаг
˂ 2700 об/мин — четверть шага
Изменяя MS2 с «0» на «1» плавно переходим с полного шага на четверть шага. В итоге, была выполнена задача плавного управления, разгоном и торможением ШД с использованием одного сигнала переключения шагов. Исходя из этого была выбрана частота перехода из полного шага в четверть шага — 2700 об/мин, что позволило добиться плавности работы ШД от 0 до 800 об/мин.
Литература:
1. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. — М.: Энергоатомиздат, 1987. — 200 с.
2. Вычужанин В. Управление шаговым электродвигателем с помощью ПЛИС: 3-е изд. Компоненты и технологии, 2004. — 96–98 с.
