




На современном этапе внедрения технологий спутниковой навигации в системы интервального регулирования движением поездов возникает острая проблема по поддержанию качества функционирования спутниковой радионавигационного системы в условиях действия внешних неблагоприятных факторов. В статье рассмотрено оперативное оповещение пользователей о геомагнитном возмущении среды как одна из эффективных мер позволяющих повысить качество передаваемых навигационно-временных определений ГЛОНАСС. Предложен к использованию универсальный индекс мерцаний, позволяющий реализовать адаптацию к резкоменяющимся условиям распространения радиоволн за счет соответствующих автоматических настроек в схемах слежения за псевдозадержкой и фазой несущей.
Программа стратегического развития ОАО «РЖД» до 2030 предусматривает внедрение инноваций нацеленных на достижение лидирующего положения компании на отечественном и мировом рынках транспортных услуг. Одним из направлений этой программы – является внедрение систем комплексного управления движением поездов, динамического мониторинга состояния инфраструктуры и подвижного состава с использованием спутниковых технологий. Дальнейшие перспективы развития отрасли, в том числе переход на высокоскоростное и скоростное движение, а также увеличение интенсивности транспортных потоков на магистралях, создают необходимость в широком использовании информационно управляющих систем на основе ГЛОНАСС/GPS.
Направление использования спутниковых радионавигационных систем (СНРС) для железнодорожного транспорта достаточно обширно, из общего числа можно выделить следующие области применения [1, с. 136]:
Контроль соблюдения требований безопасности при управлении движением поездов c передачей этих данных в диспетчерские центры управления движения и в центр управления перевозками;
Регистрация пробега подвижного состава (в частности, для оптимизации системы технического обслуживания и ремонта, определения платы за пользование инфраструктурой);
Информирование клиентуры (пассажиров, грузоотправителей и грузополучателей) о местоположении поездов, вагонов и грузов;
Локализация дефектов пути обнаруженных инспекционным подвижным составом;
Наглядное представление диспетчеру оперативной и достоверной информации о перемещении подвижного состава и его скорости по цифровой карте, а так же автоматическое представление графика исполненного движения в реальном масштабе времени;
Все большую значимость приобретает использование спутниковых навигационных систем ГЛОНАСС, систем спутниковой связи и систем дистанционного зондирования для осуществления поддержки строительства и эксплуатации железных дорог. Для проведения инженерно-изыскательных и проектных работ при строительстве и реконструкции инфраструктуры железнодорожного транспорта применение СРНС позволит существенно сократить затраты на капитальный ремонт железнодорожного полотна и его геодезическое обеспечение, на инвентаризацию земельных участков и расположенных на них зданий, строений и сооружений. Согласно технико-экономическим исследованиям окупаемость затрат на внедрение спутниковых технологий в системах контроля дислокации и управления поездом, а так же обеспечение надежной архитектуры железных дорог не превышает 2-3 лет [2, с. 3].
Так же необходимо отметить, что проводящаяся на ОАО «РЖД» модернизация устройств ЖАТ обеспечивающих безопасность движения, даже с применением современных микропроцессорных систем, имеющих расширенные функциональные возможности, не может существенно повлиять на эффективность железных дорог в целом. Причиной этому является большого количества напольного оборудования и кабельных сетей, требующих постоянного технического обслуживания и ремонта. Решить такую проблему позволит только применение технических средств безопасности с использованием спутниковых технологий [3, с. 7-9].
Таким образом, на сегодняшний день железнодорожный транспорт – это один из крупнейших потенциальных потребителей сервиса на основе спутниковых навигационных систем.
Приведенные выше существующие и перспективные направления использования СРНС предполагают наличие высоких требований к качеству навигационного обеспечения пользователей, а так же все возрастающую актуальность исследований, нацеленных на разработку организационно – технических мероприятий по поддержанию и дальнейшему улучшение навигационных характеристик СРНС, в том числе и в условиях действия внешних неблагоприятных факторов естественного и искусственного происхождения.
На современном этапе внедрения технологий спутниковой навигации большой вес в совокупности погрешностей навигационных определений имеют нерегулярные факторы, такие как гелио-геофизические факторы (ГГФ). Одним из существенных проявлений воздействия ГГФ на аппаратуру СРНС являются резкие и глубокие изменения амплитуды и фазы сигналов НС на входе измерителя радионавигационных параметров (РНП). Такие мерцания амплитуды и фазы сигналов, а также прямое воздействия мощного радиоизлучения Солнца на функционирование навигационной аппаратуры пользователя СРНС, наиболее существенно проявляется в виде резкого кратковременного снижения отношения сигнал/шум на выходе антенны навигационного приемника. Это может привести к срывам сопровождения сигналов навигационных спутников, и к возникновению значительных погрешностей измерения радионавигационных параметров. Кроме того, быстрые и глубокие изменения абсолютной величины фазы несущей, скорости и ускорения её изменений могут выйти за пределы полосы захвата следящих контуров навигационного приемника СРНС. Поскольку любой навигационный приемник СРНС является когерентной следящей системой, то потеря слежения за фазой сигнала приведет к резкому ухудшению точности измерения дальности до НС или же к потере сопровождения сигнала спутника.
Одной из эффективных мер, позволяющих повысить устойчивость функционирования аппаратуры СРНС в условиях воздействия неблагоприятных ГГФ, может стать оперативное оповещение пользователей о геомагнитном возмущении.
Целью оперативного оповещения пользователей СРНС является возможность своевременной адаптации навигационной аппаратуры потребителя к резко изменяющимся условиям распространения сигналов навигационной системы вследствие геомагнитных и спорадических возмущений среды околоземного космического пространства. Это может быть достигнуто путем своевременной перестройки следящих измерителей псевдозадержки и фазы несущей, а также путем исключения навигационных спутников, содержащих аномально большие мерцания параметров сигналов, из процесса решения навигационной задачи (в составе алгоритмов RAIM). Последствия влияния геомагнитных возмущений на качество навигационно-временных определений (НВО), как сложный физический процесс проявляются весьма неоднозначно в различных условиях (сезонно-суточных, по циклу солнечной активности и в зависимости от широты пользователя). Вследствие этого требуется введение некоторого универсального индекса, связывающего качество НВО и текущие гелио-геофизические условия. Основываясь на результатах ряда зарубежных исследований, рекомендуется использовать в качестве такого индекса - индекс мерцаний S4, определяемый как нормированная дисперсия флуктуаций мощности (P) принимаемого сигнала [4, с. 391-395]:
![]() (1)
(1)
Данный индекс может быть использован как индикатор включения адаптивной настройки схем слежения за фазой и псевдозадержкой, а так же для контроля целостности НВО в автономном и дифференциальном режиме работы навигационной аппаратуры потребителя (НАП).
В частности можно рекомендовать индекс S4 для оперативного контроля качества измерений РНП по сигналам отдельных спутников в условиях магнитных бурь и для реализации адаптивной настройки параметров следящих измерителей фазы несущей и псевдозадержки. На рис.1 проиллюстрированы возможности повышения порога помехоустойчивости следящих измерителей РНП при различном уровне ионосферных мерцаний (представленных индексом S4) за счет перестройки основных параметров измерителей. Здесь в качестве порога помехоустойчивости рассматривается минимальное отношения сигнал/шум на входе следящего измерителя (CNthr, дБ), при котором не происходит недопустимого (с точки зрения устойчивости процесса фильтрации) увеличения ошибки фильтрации фазы несущей или псевдозадержки, что определяется следующими условиями (2)
![]() (2)
(2)
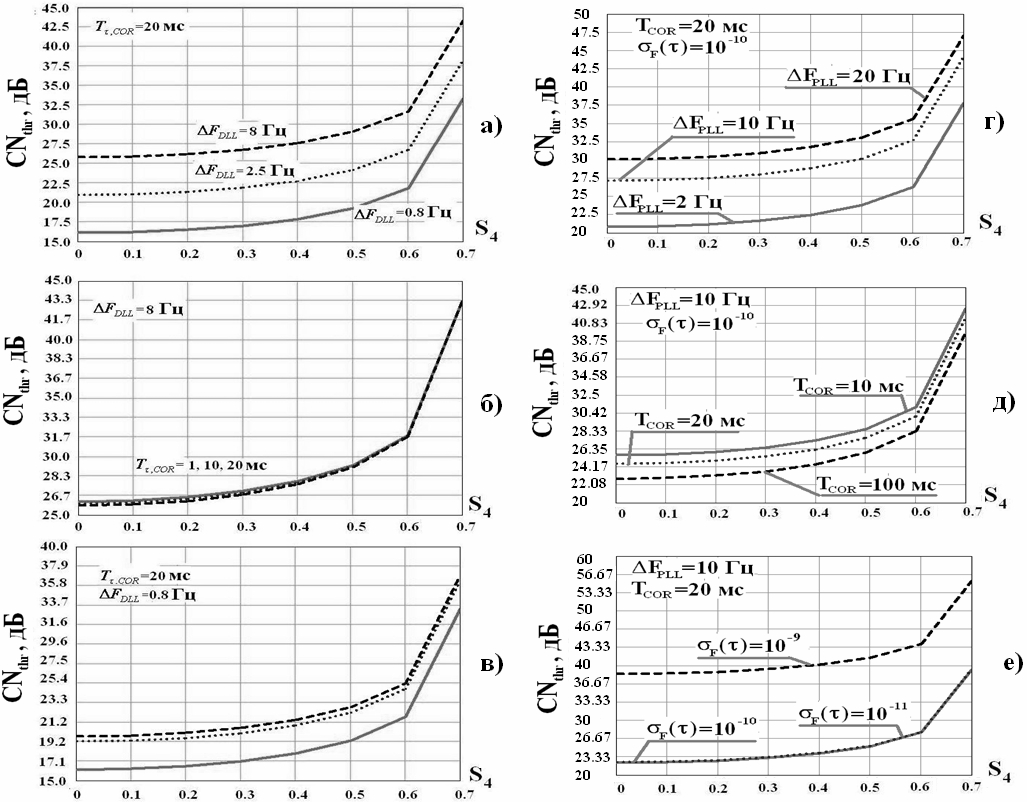
Рис.1. Зависимость помехоустойчивости схемы слежения за фазой (ССФ) и схемы слежения за псевдозадержкой (ССЗ) от параметров настройки схемы слежения и уровня ионосферных мерцаний
При выборе перестраиваемых параметров следящих измерителей шумовой полосы и времени интегрирования дополнительно учитывались следующие условия устойчивости работы схемы слежения за фазой (ССФ) и схемы слежения за псевдозадержкой (ССЗ)![]() .
(3)
.
(3)
 ,
(4)
,
(4)
где:
![]() ,
,
![]() -
шумовая полоса измерителя фазы несущей и псевдозадержки (Гц),
соответственно;
-
шумовая полоса измерителя фазы несущей и псевдозадержки (Гц),
соответственно;
![]() -
время интегрирования (мс);
-
время интегрирования (мс);![]() -
отношение крутизны фактической и расчетной дискриминационных
характеристик дискриминатора псевдозадержки.
-
отношение крутизны фактической и расчетной дискриминационных
характеристик дискриминатора псевдозадержки.
На
рис. 1 а, б, в представлены зависимости
![]() для измерителя
кодовой псевдозадержки при различных параметрах настройки и
конфигурации схемы слежения. На рис. 1 а показана зависимость CNthr
от ширины шумовой полосы
для измерителя
кодовой псевдозадержки при различных параметрах настройки и
конфигурации схемы слежения. На рис. 1 а показана зависимость CNthr
от ширины шумовой полосы
![]() при Tτ,COR
=20 мс при
использовании последовательного коррелятора и дискриминатора,
определяемого выражением
при Tτ,COR
=20 мс при
использовании последовательного коррелятора и дискриминатора,
определяемого выражением
 ,
(5)
,
(5)
где Qk, QE,k и QL,k – отсчеты квадратурных компонент корреляторов, соответствующих прямому сигналу и его сдвинутым копиям с опережением и запаздыванием.
На рис. 1 б представлена зависимость CNthr от времени интегрирования - Tτ,COR, при ∆FDLL=0.8 Гц и использовании того же типа коррелятора и дискриминатора, что и на рис. 1 а. И, наконец, рис.1 в демонстрирует зависимость CNthr от используемого типа дискриминатора, при TCOR =1 мс, и ∆FDLL=0.8 Гц и том же, что и выше, типе коррелятора. В последнем случае сплошная кривая соответствует случаю использования дискриминатора (5), а пунктирные кривые – дискриминаторам, которые описываются выражениями
![]() , (6)
, (6)
![]() , (7)
, (7)
где IP,k, IE,k и IL,k – отсчеты синфазных компонент корреляторов, соответствующие прямому сигналу (IP,k), и его сдвинутым копиям с опережением (IE,k) и запаздыванием (IL,k).
Во
всех случаях предполагалась стандартная расстройка опорных сигналов
дискриминатора псевдозадержки - d=0.5.
Как можно видеть, наиболее эффективный путь добиться повышения
помехоустойчивости следящего измерителя псевдозадержки в условиях
действия ионосферных мерцаний это перестройка шумовой полосы - ∆FDLL.
Так,
изменение ширины шумовой полосы измерителя в пределах
![]() =0,8…8
Гц при уровне ионосферных мерцаний S4>0.5
дает выигрыш в снижении порога устойчивости работы измерителя - CNthr
на 9-10 дБ. Если учесть, что воздействие ионосферных мерцаний ведет к
кратковременным провалам отношения сигнал/шум на 15-30 дБ, адаптивная
оперативная перестройка шумовой полосы следящего измерителя может
стать одной из эффективных мер к повышению надежности работы НАП при
резких изменениях свойств среды распространения радиоволн.
Использование
дискриминатора с алгоритмом работы (5) также позволит улучшить
помехоустойчивость, хотя и не столь существенно - на 1-1.5 дБ (рис.1
в). Вместе с тем, изменение времени интегрирования в допустимых
пределах (4) не ведет к заметному повышению помехоустойчивости
измерителя псевдозадержки при воздействии мерцаний с уровнем S4>0.5.
=0,8…8
Гц при уровне ионосферных мерцаний S4>0.5
дает выигрыш в снижении порога устойчивости работы измерителя - CNthr
на 9-10 дБ. Если учесть, что воздействие ионосферных мерцаний ведет к
кратковременным провалам отношения сигнал/шум на 15-30 дБ, адаптивная
оперативная перестройка шумовой полосы следящего измерителя может
стать одной из эффективных мер к повышению надежности работы НАП при
резких изменениях свойств среды распространения радиоволн.
Использование
дискриминатора с алгоритмом работы (5) также позволит улучшить
помехоустойчивость, хотя и не столь существенно - на 1-1.5 дБ (рис.1
в). Вместе с тем, изменение времени интегрирования в допустимых
пределах (4) не ведет к заметному повышению помехоустойчивости
измерителя псевдозадержки при воздействии мерцаний с уровнем S4>0.5.
Графики
зависимостей
![]() на рис. 1 г, д, е для схемы слежения за фазой несущей при различных
параметрах настройки показывает, что независимо от параметров
настройки измерителя, по мере роста интенсивности мерцаний
увеличивается и минимальное значение CNthr,
что влечет и повышение вероятность срыва сопровождения фазы несущей.
При мерцаниях с индексом S4≤0.5
это проявляется не столь существенно: порог устойчивого сопровождения
фазы несущей - CNthr
увеличивается не более чем на 2-3 Дб. При дальнейшем росте
интенсивности мерцаний, однако, ситуация резко ухудшается. Так, при
уровне мерцаний S4=0.7,
порог CNthr
при некоторых параметрах настройки возрастает на 10-12 дБ и уже
превышает средний уровень сигнала НС на входе измерителя. Изменением
параметров настойки измерителя можно добиться повышения устойчивости
слежения за фазой несущей в условиях действия значительных мерцаний.
Как видно из рис. 1 г наибольший положительный эффект здесь может
дать сужение шумовой полосы следящего измерителя (ΔFPLL):
при сужении в 10 раз пороговое значение CNthr
в области сильных мерцаний (S4>0.5)
снижается на 9 Дб. Увеличение времени интегрирования TCOR
при S4>0.5
дает существенно меньший эффект: величина CNthr
снижается только на 2-3 дБ (рис.1 д). И, наконец, нестабильность
частоты опорного генератора, не оказывает практически никакого
влияния на уровень порога CNthr,
если σF(τ)≤10-10.
В противном же случае, низкая нестабильность частоты опорного
генератора (σF(τ)≥10-9),
напротив, может стать основным фактором, снижающим устойчивость
сопровождения фазы несущей (рис.1 е).
на рис. 1 г, д, е для схемы слежения за фазой несущей при различных
параметрах настройки показывает, что независимо от параметров
настройки измерителя, по мере роста интенсивности мерцаний
увеличивается и минимальное значение CNthr,
что влечет и повышение вероятность срыва сопровождения фазы несущей.
При мерцаниях с индексом S4≤0.5
это проявляется не столь существенно: порог устойчивого сопровождения
фазы несущей - CNthr
увеличивается не более чем на 2-3 Дб. При дальнейшем росте
интенсивности мерцаний, однако, ситуация резко ухудшается. Так, при
уровне мерцаний S4=0.7,
порог CNthr
при некоторых параметрах настройки возрастает на 10-12 дБ и уже
превышает средний уровень сигнала НС на входе измерителя. Изменением
параметров настойки измерителя можно добиться повышения устойчивости
слежения за фазой несущей в условиях действия значительных мерцаний.
Как видно из рис. 1 г наибольший положительный эффект здесь может
дать сужение шумовой полосы следящего измерителя (ΔFPLL):
при сужении в 10 раз пороговое значение CNthr
в области сильных мерцаний (S4>0.5)
снижается на 9 Дб. Увеличение времени интегрирования TCOR
при S4>0.5
дает существенно меньший эффект: величина CNthr
снижается только на 2-3 дБ (рис.1 д). И, наконец, нестабильность
частоты опорного генератора, не оказывает практически никакого
влияния на уровень порога CNthr,
если σF(τ)≤10-10.
В противном же случае, низкая нестабильность частоты опорного
генератора (σF(τ)≥10-9),
напротив, может стать основным фактором, снижающим устойчивость
сопровождения фазы несущей (рис.1 е).
Таким образом, использование оперативных предупреждений, которые передаются в НАП (индексы S4 по наблюдаемым НС, оповещение о превышении порога опасного радиоизлучения Солнца, оповещение об опасных вариациях геомагнитного поля), дают возможность реализовать адаптацию к резко изменяющимся условиям распространения радиоволн за счет соответствующих автоматических настроек в схемах слежения за псевдозадержкой и фазой несущей. Можно добиться снижения влияния сильных мерцаний на качество измерения РНП за счет оптимального выбора параметров настроек следящих измерителей кодовой псевдозадержки (главным образом, ∆FDLL), и фазы несущей (прежде всего ∆FPLL).
В целом результаты теоретических исследований изложенных в статье позволяют сформулировать практические рекомендации, направленные на совершенствование навигационной аппаратуры пользователя ГЛОНАСС, а также ее функциональных дополнений.
Литература:
Jean B. Картографирование железных дорог для систем спутниковой навигации // Железные дороги мира. 2001. № 10. С. 61.
Гапанович В. А. Рациональное использование спутниковых технологий в комплексе антикризисных мероприятий ОАО «РЖД» // Евразия Вести. 2009. № 7. С. 3.
Хоромушкин К.Д., Павлов Е.В. Система интервального регулирования на базе радиоканала // Автоматика, связь, информатика. 2009. № 11. С. 7–9.
Dierendonck, A. J. Van Measuring Ionosphere Scintillation Effects from GPS Signals / Van Direndonck A. J., Hua Q. // ION 59-th Annual Meeting, Albuquerque, 11-13June. – New Mexico, 2001. – P. 391 – 395.
