




Моделирование контура тока системы «ТП – Д» в Matlab-Simulink и Си
Емельянов Александр Александрович, старший преподаватель;
Бесклеткин Виктор Викторович, старший преподаватель;
Зорин Дмитрий Иванович, студент;
Зозулин Михаил Сергеевич, студент;
Романовский Виталий, студент;
Андреева Валерия Игоревна, студент;
Ложкина Диана Петровна, студент;
Черных Анастасия Васильевна, студент
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Пестеров Дмитрий Ильич, студент магистратуры
Уральский государственный университет путей сообщения (г. Екатеринбург)
В работе [1] было рассмотрено моделирование силовой части системы «ТП – ДПТ НВ». В данной работе приведем модель контура тока этой системы в Matlab-Simulink и на языке Си.
Математическая модель контура тока системы «ТП – Д» в Simulink приведена на рис. 1.
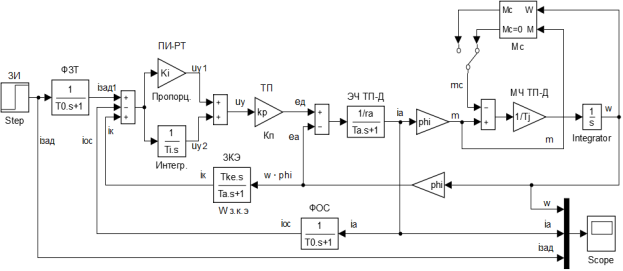
Рис. 1. Математическая модель контура тока системы «ТП – Д» в Simulink
Расчет параметров производим в Matlab-Script (рис. 2).
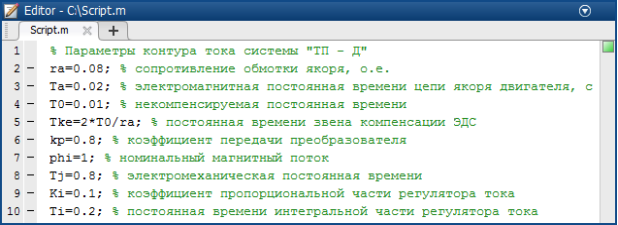
Рис. 2. Расчет параметров модели в Matlab-Script
Результаты моделирования контура тока системы «ТП – Д» в Simulink представлены на рис. 3.
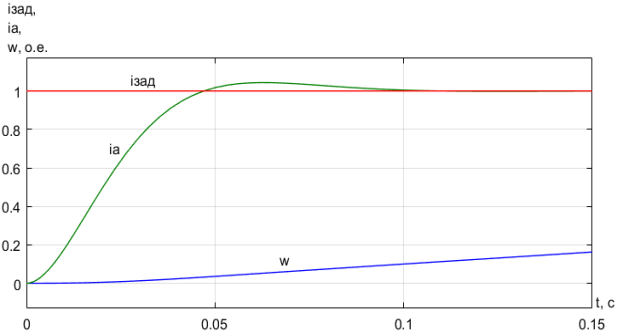
Рис. 3. Графики тока задания iзад., тока якоря ia и скорости ω в Simulink
Выразим ток на выходе звена ФЗТ (фильтр в цепи задания тока):
![]()
![]()
![]()
Перейдем от изображения к оригиналу:
![]()
Задание по току на выходе фильтра для программирования на языке Си будет иметь следующий вид:
![]()
Аналогично выразим ток на выходе звена ФОТ (фильтр в цепи обратной связи по току):
![]()
![]()
![]()
![]()
Ток на выходе звена компенсации ЭДС (ЗКЭ):
![]()
где![]()
![]()
![]()
![]()
Из уравнения звена механической части (МЧ ТП - Д) выразим ω·s:
![]()
![]()
Отсюда выразим ток на выходе звена компенсации ЭДС для программирования на Си:
![]()
ПИ-регулятор тока:
![]()
![]() - пропорциональная часть;
- пропорциональная часть;
![]() - интегральная часть,
- интегральная часть,
где![]()
Преобразуем напряжение uу2 на выходе интегральной части для Си:
![]()
![]()
Программирование контура тока системы «ТП – Д» на языке Си приведено на рис. 4.
Результаты моделирования контура тока «ТП – Д» на Си даны на рис. 5.
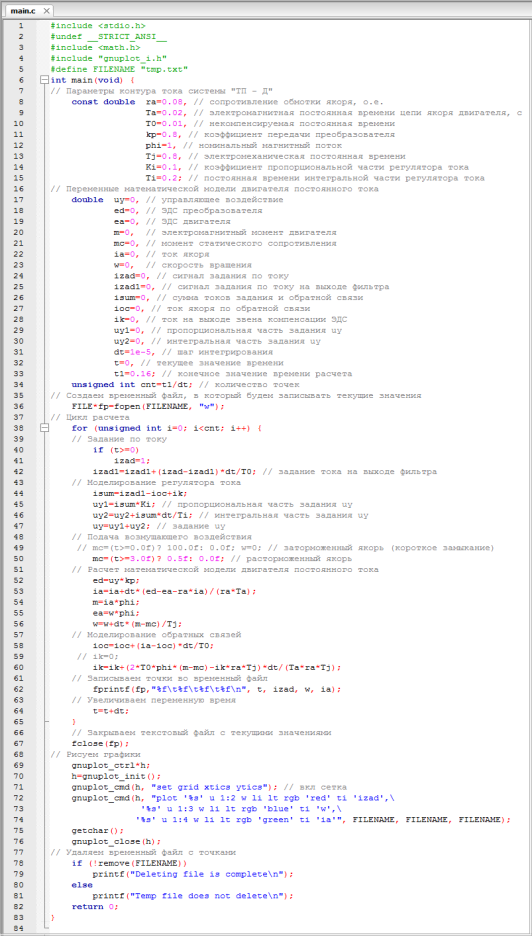
Рис. 4. Программирование контура тока системы «ТП – Д» на языке Си
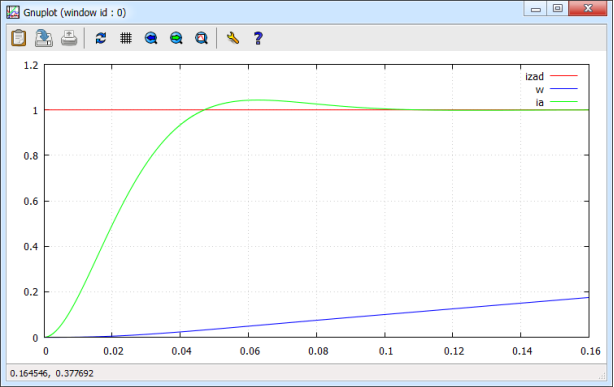
Рис. 5. Графики тока задания iзад., тока якоря ia и скорости ω в Си
Литература:
- Емельянов А.А., Бесклеткин В.В., Агзамов И.М., Зозулин М.С., Онищенко К.Ю., Зорин Д.И., Блинов Е.К., Бухряков И.Ф., Дятлов О.А., Чумичев П.Е., Шамиев Р.Р. Моделирование силовой части системы ТП - ДПТ НВ в Matlab и Си // Молодой ученый. - 2019. - №11. - С. 7-13.
- Шрейнер Р.Т. Системы подчиненного регулирования электроприводов. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 279 с.
- Васильев А.Н. Matlab. Самоучитель. Практический подход. – СПб.: Наука и Техника, 2012. – 448 с.
- Васильев А.Н. Программирование на C++ в примерах и задачах. – М.: Издательство «Э», 2017. – 368 с.
