




Моделирование преобразователей координат и АИН ШИМ в Си
Емельянов Александр Александрович, старший преподаватель;
Бесклеткин Виктор Викторович, старший преподаватель;
Агзамов Игорь Маратович, студент;
Зозулин Михаил Сергеевич, студент;
Зорин Дмитрий Иванович, студент;
Бухряков Иван Федорович, студент;
Онищенко Константин Юрьевич, студент;
Дятлов Олег Алексеевич, студент
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Пестеров Дмитрий Ильич, студент магистратуры
Уральский государственный университет путей сообщения (г. Екатеринбург)
В работе [1] приведена функциональная схема математической модели САР скорости системы «АИН ШИМ – АД». Моделирование проводилось в Matlab-Script. В данной статье приводим небольшую часть этой схемы, состоящую из преобразователей координат и автономного инвертора напряжения с широтно-импульсной модуляцией (АИН ШИМ), как показано на рис. 1.
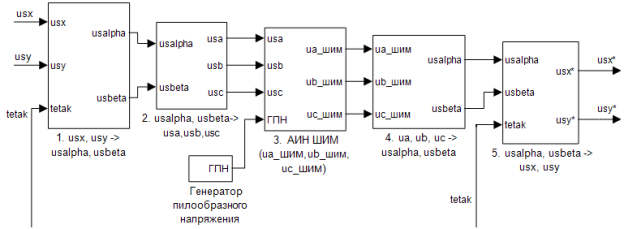
Рис. 1. Преобразователи координат и АИН ШИМ
Цель данной работы – создание программы этой подсистемы на языке Си.
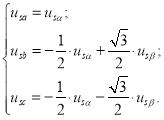
С помощью первого элемента производится преобразование вектора ![]() с проекциями usx и usy из системы координат, вращающейся с частотой ωк, в неподвижную декартову систему координат с осями α и β, в которой в каждый момент времени будут определяться по следующим зависимостям [2], [3]:
с проекциями usx и usy из системы координат, вращающейся с частотой ωк, в неподвижную декартову систему координат с осями α и β, в которой в каждый момент времени будут определяться по следующим зависимостям [2], [3]:
|
|
(1) |
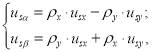
гдеρx = cos θк и ρy = sin θк.
Угол поворота θк определяется из следующей формулы:
|
|
(2) |
Производная dθк в работе [1] была представлена через конечные разности:
![]()
Отсюда:
|
|
(3) |
![]()
![]()
![]()
![]()
При программировании в Си из всех уравнений исключаем скобки (i) и (i+1). В этом случае уменьшается число символов и, если число циклов составляет сотни тысяч, то это скажется на быстродействии расчета. Рассмотренные выше уравнения в этом случае примут следующий вид:
![]()
![]()
![]()
![]()
![]()
Примечания:
1. Скорость вращения координатной системы ωк вычисляется в системе [1] в блоке «наблюдатель».
При программировании в Си подсистемы (рис. 1) примем в формуле ωк = 2π·f частоту f = 50 Гц = const.
Для того, чтобы использовать число π = 3,14…, необходимо ввести заголовочный файл #include __STRICT_ANSI__. Число π в Си обозначается M_PI, тогда скорость вращения ωк запишется в следующем виде:
![]()
2. Проекции статорного напряжения usx и usy в работе [1] вычисляются на выходе регуляторов тока по проекциям x и y с учетом алгебраической суммы сигналов с выхода звена компенсации перекрестных связей. В данной работе примем usx = 1 и usy = 0.
3. В начале программы идет перечисление переменных us_alfa, us_beta, t, tau и т.д. В каждом цикле стираются предыдущие значения этих переменных и записываются новые. Для того, чтобы увидеть графическое изображение изменения тех или иных переменных во времени, используется программа «gnuplot», которая состоит из более шестисот операторов. «Gnuplot» необходим либо в обучающих программах, либо на стадии отладки программ. После отладки «gnuplot» удаляют из программы и загружают в микроконтроллер только рабочую программу, а графики смотрят на реальном осциллографе.
На рис. 2 приведена программа реализации на языке Си первого блока преобразования координат. Зависимости us_alfa и us_beta во времени даны на рис. 3.
В следующем блоке осуществляется преобразование проекций вращающего вектора ![]() usα и usβ в мгновенные значения по проекциям вращающегося вектора на оси a, b, c неподвижной трехфазной системы координат.
usα и usβ в мгновенные значения по проекциям вращающегося вектора на оси a, b, c неподвижной трехфазной системы координат.
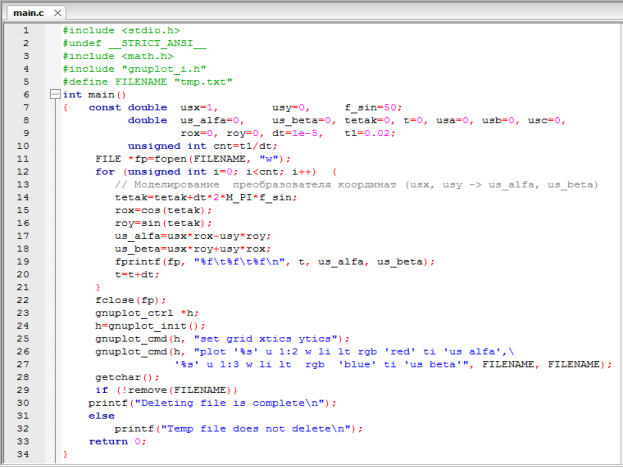
Рис. 2. Программа преобразования вектора ![]() из вращающейся системы (x, y) координат в неподвижную декартову систему (α, β)
из вращающейся системы (x, y) координат в неподвижную декартову систему (α, β)
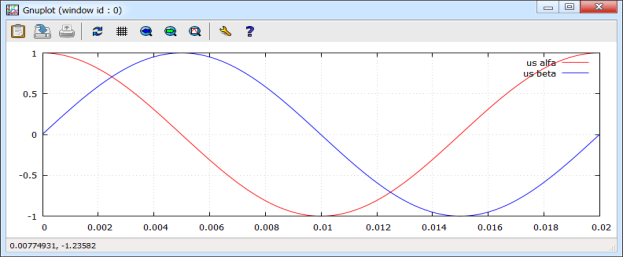
Рис. 3. Зависимости us_alfa и us_beta на выходе первого преобразователя
Формулы преобразования приведены в работах [2], [3] и имеют следующий вид:
|
|
(4) |
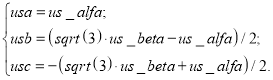
Мгновенные значения usb и usc при программировании в Си лучше дать в следующем виде:
![]()
![]()
В Си система уравнений (4) будет иметь следующий вид:
Полная программа двухэтапного обратного преобразования в Си приведена на рис. 4.
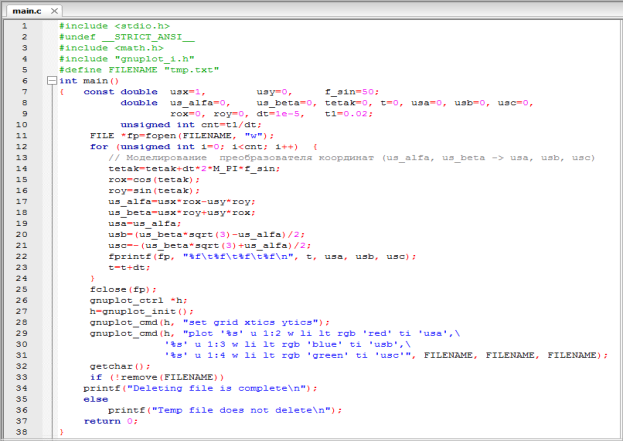
Рис. 4. Программа двухэтапного обратного преобразования вектора ![]() из вращающейся системы координат в неподвижную трехфазную систему
из вращающейся системы координат в неподвижную трехфазную систему
Результаты программирования usa, usb и usc приведены на рис. 5.
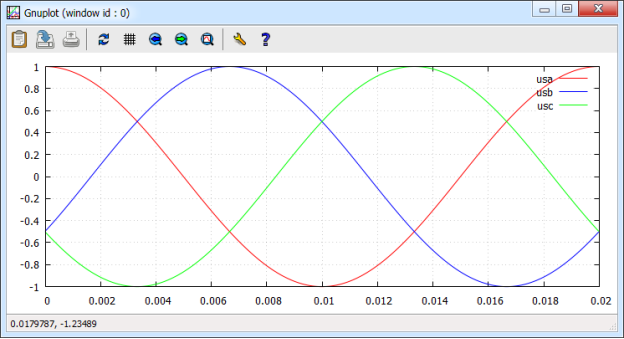
Рис. 5. Зависимости usa, usb и usc во времени
Сигналы usa, usb и usc с выхода второго блока подаются на следующий блок – автономный инвертор напряжения с широтно-импульсной модуляцией. Этот блок состоит из двух частей: нуль-орган и инвертор напряжения.
Для лучшего понимания приведем на рис. 6 моделирование нуль-органа в Matlab-Simulink и Matlab-Script из работы [1]. Достоинством моделей в Simulink является наглядность. Видимы связи сигналов, например, для фазы «a»: сигнал usa сравнивается с сигналом, поступающим с генератора пилообразного напряжения, и за сумматором устанавливается релейный элемент, чувствительный к знаку, и как бы ни менялись величины входных сигналов на сумматоре, он скачком поддерживает постоянный уровень сигнала. Как только меняются знаки на выходе сумматора, мгновенно релейный элемент скачком переключает на противоположный и поддерживает его постоянным и т.д. На выходе релейного элемента получаются ступенчатые сигналы с разной шириной по времени, отсюда название – широтно-импульсная модуляция. В левом нижнем углу показаны осциллограммы выходных сигналов нуль-органов по фазам fa, fb и fc, получивших название «коммутационные функции».
В правой части показана программа с логическими операторами на универсальном языке математики. Ценность этой формы моделирования (программирования) в его универсальности.
Для того, чтобы перейти к программированию в Си, достаточно убрать (i) и (i+1). Чем меньше символов, тем выше скорость расчета.
На рис. 7 приведено программирование нуль-органа в Си для фазы «а». На рис. 8 показаны результаты моделирования по одной фазе, и мы увидим копию осциллограмм в Matlab и Си.
На рис. 9 приведены математические зависимости выходных напряжений АИН – usa_pwm, usb_pwm и usc_pwm от коммутационных функций fa, fb и fc [2], [3]. В левой верхней части приведена реализация этих формул на математической модели Matlab-Simulink, а в правой нижней части в Matlab-Script. В нижней левой части даны осциллограммы пятиуровневых выходных напряжений АИН ШИМ (![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ).
).
Ценность данного рисунка (рис. 9), приведенного из работы [1], состоит в том, что на одном листе представлены вместе формулы и различные способы реализации. Снова исключив из математической модели Matlab-Script (i) и (i+1), переходим к программе АИН ШИМ на языке Си.
На рис. 10 приведена полная программа, включающая не только АИН ШИМ, но и двухэтапные обратные преобразователи. Результаты моделирования на выходе блока 3 представлены на рис. 11.
На рис. 12 дана программа всех элементов подсистемы (АИН ШИМ – преобразователи координат) в Си. Результаты моделирования на выходе блоков 4 и 5 приведены на рис. 13 и 14.
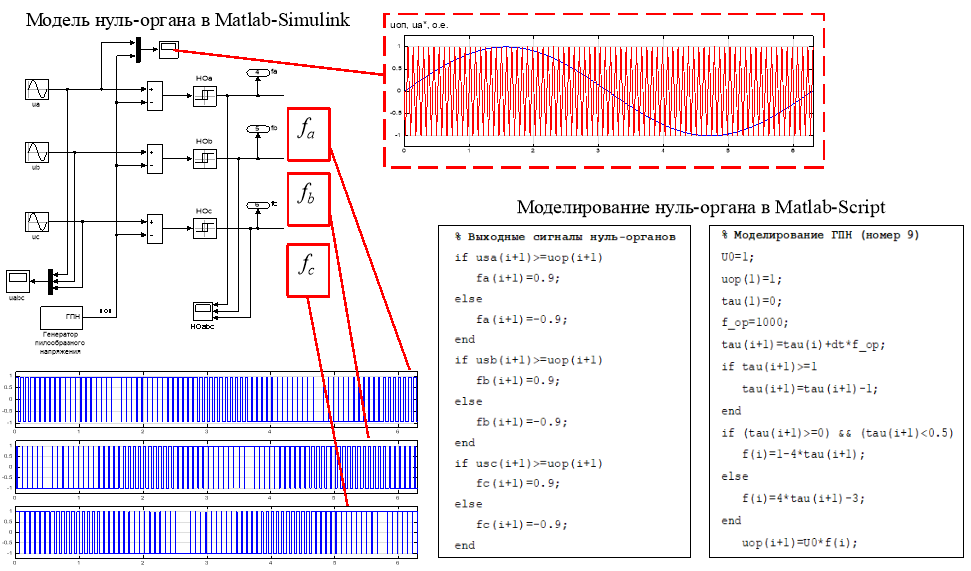
Рис. 6. Нуль-орган в Simulink и Matlab-Script
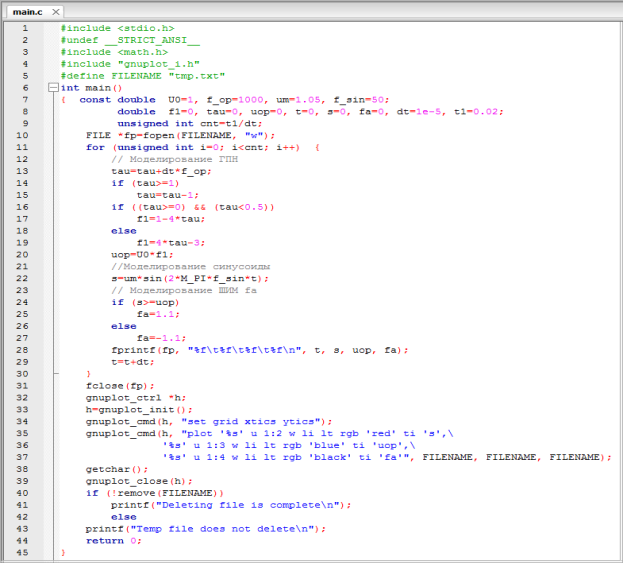
Рис. 7. Моделирование usa, uop и fa для фазы «а» в Си
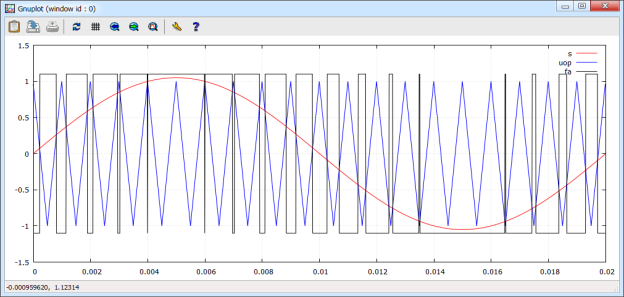
Рис. 8. Зависимости usa, uop и fa от времени
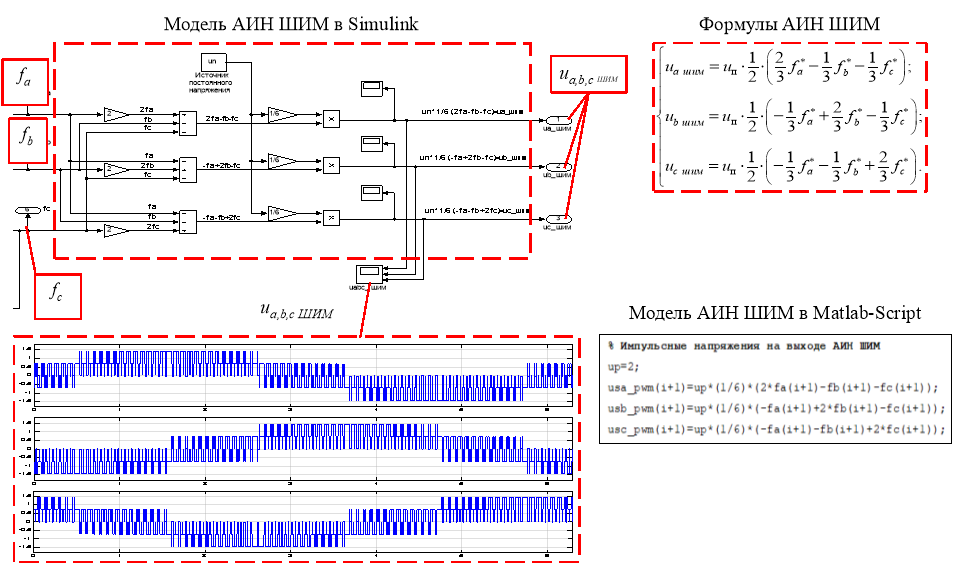
Рис. 9. Моделирование АИН ШИМ в Simulink и Matlab-Script
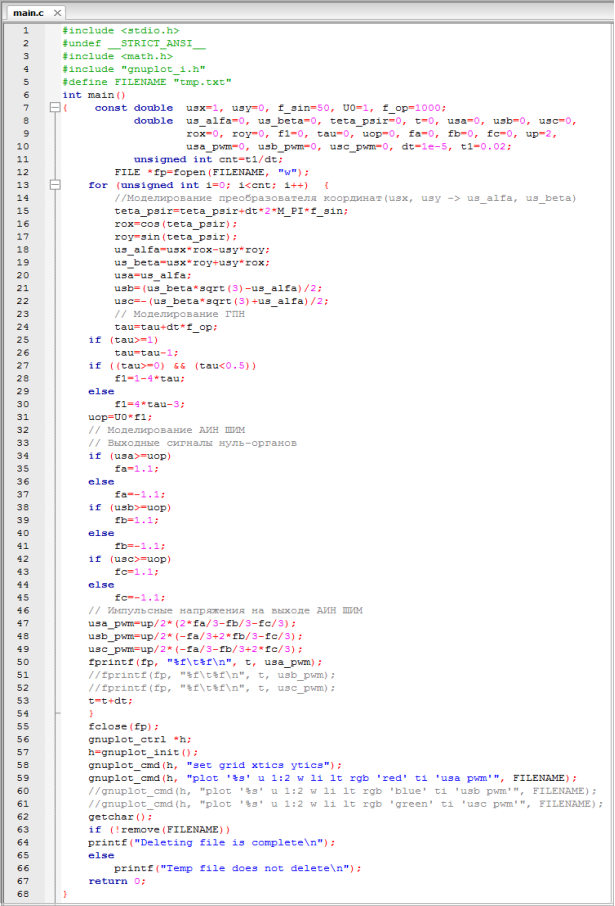
Рис. 10. Программирование в Си АИН ШИМ на выходе блока 3 с учетом двухэтапного обратного преобразования координат
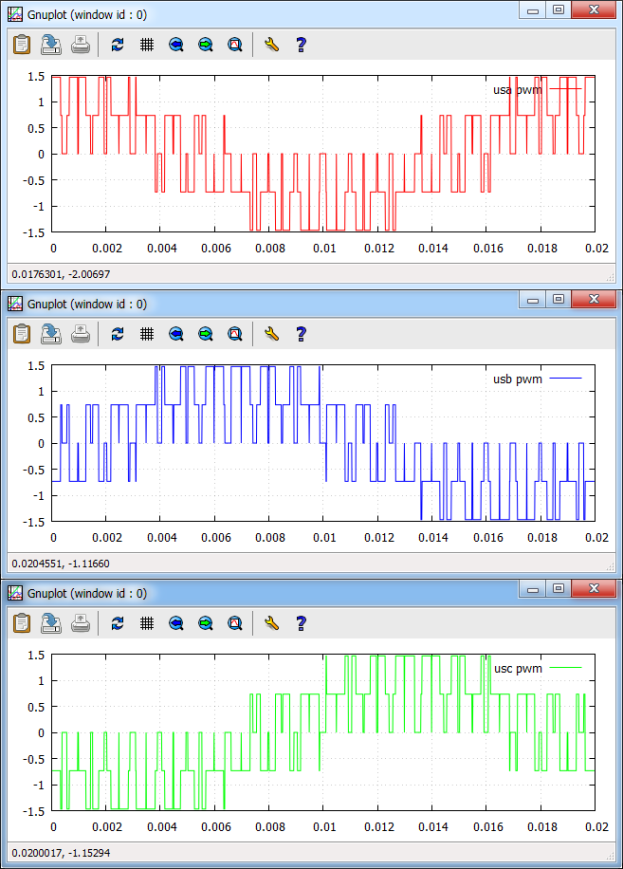
Рис. 11. Зависимости usa_pwm, usb_pwm и usc_pwm на выходе блока 3
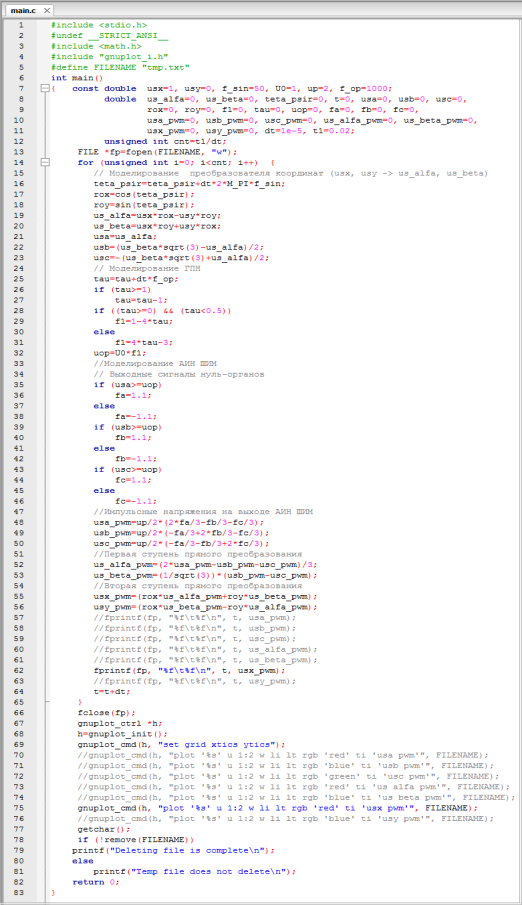
Рис. 12. Программирование в Си всех элементов подсистемы (АИН ШИМ – преобразователи координат)
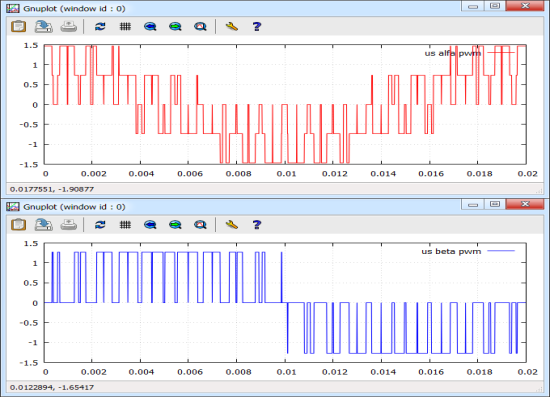
Рис. 13. Сигналы us_alfa_pwm и us_beta_pwm на выходе блока 4
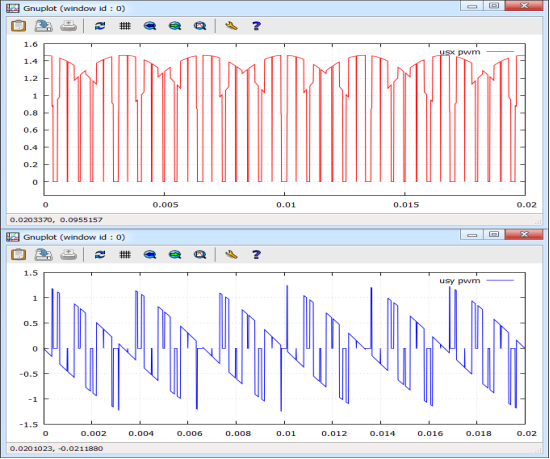
Рис. 14. Сигналы usx_pwm и usy_pwm на выходе блока 5
Литература:
- Емельянов А.А., Гусев В.М., Пестеров Д.И., Даниленко Д.С., Воротилкин Е.А., Коновалов И.Д., Бесклеткин В.В., Иванин А.Ю. Моделирование САР скорости системы «АИН ШИМ – АД» с переменными ψr - is в Matlab-Script в системе относительных единиц // Молодой ученый. — 2018. — №22. — С. 6-31.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. - Екатеринбург: УРО РАН, 2000. - 654 с.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.
- Васильев А.Н. Программирование на C++ в примерах и задачах. – М.: Издательство «Э», 2017. – 368 с.
