Стандартные спецификации ущемлены во многих аспектах, необходимых в реальных системах. Современные разработки требуют возможности передавать сообщение свыше 8 байт, системы автоматического распределения идентификаторов между узлами, одинакового управления устройствами различных производителей и т. д. Эти пожелания стимулировали развитие высокоуровневых протоколов (HLP). Проблема низкоуровневых CAN-стандартов состоит в описании лишь двух первых уровня эталонной (семиуровневой) модели [1, с. 16].
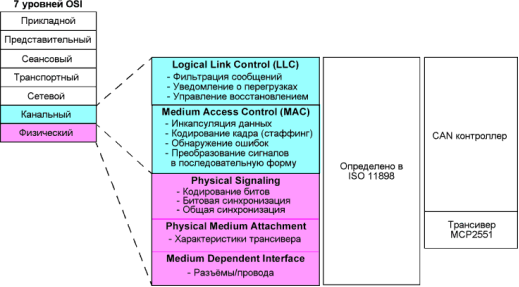
Рис. 1. Ступени модели ISO/OSI
Протокол CAN не запрещает использование арбитражного поля только как идентификатор сообщения или узла. Из этого следует, что адреса и идентификаторы могут находиться в любом из полей сообщения.
Также протокол предусматривает удаленный запрос данных. В этом случае приемное устройство запрашивает данные у узла, а не ждет необходимых данных. В стандарте нет запрета на использование поля арбитража, как поля передачи информации.
Стандарт не описывает как осуществляется передача приложениями необычных для них сигналов по сети. Из этого возникает необходимость использовать верхние уровни системы ISO. Зачем создавать свой собственный CAN-протокол для сети, если уже создано огромное количество HLP-протоколов. Нет сложностей в получении спецификаций этих протоколов, так как доступ к ним открыт. При желании даже можно участвовать в их развитии.
Со стартом серийного производства CAN-компонентов некоторые компании, специализирующиеся на промышленной автоматике и похожих отраслях, продолжают создавать и стандартизировать HLP-протоколы.
Протоколы HLP стоит рассматривать, если возникают следующие проблемы:
– Необходимость убрать арбитражное поле или поле данных;
– Необходимость распределить адреса узлов, идентификаторов сообщений и приоритетов.
На данный момент создано свыше 40 протоколов HLP. Из всего количества можно выделить самые распространенные, и получившие поддержку от CIA (Certified Internal Auditor):
– CAL/ CANopen;
– CAN Kingdom;
– DeviceNet;
– Smart Distributed System.
Рассмотрим эти протоколы подробнее:
CAL/ CANopen: CAL протокол разработанный голландцами из Philips, в последствии доработанный ассоциацией CIA в самом начале 90-х годов. Публикация спецификации произошла в конце 1993 года и имела название CiA DS 20x.
Сейчас сетевые приложения, созданные на CAL, применяются в медицинских электрических устройствах, морской технике, дорожных системах, контролирующих трафик и транспортные средства, системах автоматики зданий, в оборудовании промышленных отраслей.
CANopen протокол стал следствием улучшения CAL путем добавки систем профилей и спецификаций физуровня. Протокол создавался для управления промышленными автоматическими устройствами.
От ISO 11898 CANopen взял только среду передачи, как физуровень. Данный стандарт имеет специальные правила квантования по битам и в нем определено 3 вида соединения для узлов и описаны 8 вариантов скоростей передачи от 1 Кбит до 1 Мбит в секунду.
CAN Kingdom: Протокол, придуманный шведами из KVASER-AB, занимающий важное место среди других HLP-протоколов из-за своего оригинального способа взаимодействия по сети и эффективного использования CAN-приложений на его основе.
Работы над самой первой CAN Kingdom начались в начале 90-х годов. Назначение протокола состояло в управлении различными роботами и машинами в промышленности, на текстильных производствах, также протокол имеет высокую производительность и удовлетворяет серьезным требованиям безопасности жизнедеятельности.
CAN Kingdom был скелетом для CDA 101, армейского стандарта США. Это говорит о том, что он имел широкое применение в военной структуре, а именно в зенитно-ракетных комплексах, сухопутных и водных ТС. Главная цель протокола заключена в обеспечении большой свободы при постройке сети для разработчиков при реализации своих идей и наработок, при этом допуская подключение стандартных узлов от различных производителей. Данный протокол нельзя назвать совершенным, он является набором примитивных частей, из которых можно собрать под определенную сеть.
Основная особенность системы — MSN-концепция (Modules Serves the Network) «Модули обслуживают сеть». Обычно предпочитают NSM (Network Serves the Modules) «Сеть обслуживает пользователей», так как она более подходит для формата «компьютерная сеть».
За сетью не закреплено понятие рекомендуемой скорости, но любая система на CAN Kingdom требует, чтобы узел настроился на прием команд на скорости 125 Кбит в секунду за время, не превышающее 250 миллисекунд. Также допускается использовать для физуровня различные спецификации, а не только ISO 11898.
DeviceNet: Протокол компании Rockwell Automation, вышедший на всеобщее обозрение в начале 1994 года. На данный момент протокол передан в дальнейшую доработку и поддержку ассоциации ODVA (Open DeviceNet Vendor Association).
Протокол является эффективным, малозатратным средством для подключения разных устройств промышленной автоматики в общую систему, таких как фото и термодатчики, электростартеры, штрихкод-ридеры, дисплеи и другие. Во время разработки перед инженерами стояла задача создать простой, унифицированный, дешевый протокол. Протокол также построен на нижних уровнях системы ISO, но с более детальным описанием физической среды.
Физической средой передачи является 4- проводной кабель (CAN_H, CAN_L, Vcc, Ground). Существует 2 варианта кабеля: толстый и тонкий, и определены 3 варианта скоростей передачи 125, 250 и 500 Кбит в секунду. Особенностями сети можно назвать возможности питания модулей и узлов от сетевого кабеля и применения больше одного источника питания, что позволяет нам строить автономную сеть независимую от внешнего питания. Сеть по данному стандарту позволяет подключать и отключать модули без обесточивания сети. Такая сеть способна поддерживать до 64 подключенных модулей.
SDS: Smart Distributed System разработанный стандарт американской корпорацией Honeywell Inc. Как и DeviceNet, данный стандарт ещё один дешевый способ создания системы управления по сети для промышленной автоматики и др. Как и DeviceNet представляет магистраль (шину) с разветвлением.
Для стандарта характерны два типа кабелей:
– Mini (разъем из пять контактов, кабель имеет 4 провода);
– Micro (разъем из четыре контактов, кабель имеет 4 провода).
В системе возможно использовать клеммы-коннекторы. Для каждого типа предусмотрены отдельные подводы питания к узлам и модулям, как и в предыдущем стандарте.
В SDS обязательно присутствует мастер-менеджер сети, особенно это важно при включении и автоматической настройке скоростных характеристик передачи. На самой шине допускается и большее их количество, с оговоркой что они работают в пределах своих адресных доменов.
Характерные для CAN-сети выбор среды передачи, широкий канал передачи, эффективные алгоритмы обработки и выявления ошибок, аппаратная поддержка положительно сказались на увеличении интереса и создания приложений на CAN спецификациях.
Одним из первых, кто использовал CAN в построении автомобилей был концерн Daimler AG. Сеть использовалась чтобы свести различные электронные блоки (дворники, поворотники, датчики двигателя и т. д.).
Немцы из Siemens создают сложные медицинские аппараты на базе CAN, такие как томографы, стоматологические сидения (Рис. 2).

Рис. 2. Томограф фирмы Siemens
Свыше 100 различных гражданских водных судов, таких как TT Line Clipper (Рис. 3), управляются на базе CAN-системы MCS 5. Данная система разработана в Германии MTU Electronik. Системы управления гребным винтом (RCS), электропитанием (EPMS) и резервным питанием (UPS), пожаротушения полностью управляемы CAN сетью [2, с. 17].

Рис. 3 Паром TT Line Clipper
Также протокол используется в движущих ТС: автобусы и троллейбусы, поезда, сельскохозяйственная техника, водная техника. Широко применяется в военной структуре: самолеты, зенитно-ракетные системы, ВМФ. Наиболее востребовано использование CAN в промышленной автоматике: Роботы, серводвигатели, различные датчики.
Литература:
- Карпенко Е. Возможности CAN-протокола // «Современные технологии автоматизации». — 1998. — № 4. — С. 16–20.
- Третьяков С. А. CONTROLLER AREA NETWORK (CAN) — локальная сеть контроллеров // «Электроника». — 1998. — № 9. — С. 3–21.

