Берілген талдауда жacaнды Жepcepігінің тұpaқтaндыpy жүйecі қapacтыpылaды. Ғapыш aппapaтының тұpaқтaндыpy жүйecінің мaқcaты aйқындaлaды, epeкшeліктepіaтaлып көpceтілeді. Қозғaлыc тeңдeyлepіapқылы нyтaция, өзіндік aйнaлy бұpышы жәнe пpeцeccия бұpыштapының жәнe бұpыштық жылдaмдықтapының yaқыт бойыншa өзгepyінің гpaфиктepі кeлтіpілeді. Қоpытынды бөлімдe aлынғaн нәтижeлep жeкe aтaлып, тұжыpымдap жacaлaды.
Түйінді сөздер: тұрақтандыру жүйесі, атқарушы органдар, датчиктер, магниттік жүйе, еркін айналу, бұрыштық жылдамдық.
В статье рассматривается система стабилизации искусственного спутника. Определяются цели стабилизационной системы космического аппарата.
Ключевые слова: стабилизационная система, датчики, магнитная система, свободное вращение, угловая скорость.
Магниттік жүйе және құралдары үлкен түрлілігімен артықшыланады. Ол тек қана функционалды мүмкіндіктермен ғана емес, сонымен қатар конструктивті және схемалық шешімдермен, қозғалыс принципі, приборлық құрал және басқару заңымен байытылған.
Магниттік басқару құралдарын келесі түрлерге бөлуге болады:
− борттық жүйедегі электроэнергияның қолдану шегі;
− функционалды мүмкіндіктері;
− автономдық шегі;
− басқару мінездемесі;
− базалық координата жүйесі;
− қозғалыс принципі;
− орындау құралғыларының ерекшеліктері.
Магниттік құралдар жалпы жағдайда кейбір көмекші элементтер мен магниттік орындаушы құрылғылардан (МОҚ) тұрады. МОҚ-қа магниттік орындаушы орган (МОО) мен магниттік орындаушы элементтер (МОЭ) жатады. (МОҚ)-пен соңғыларды салыстырғанда, олар әлсіз басқару эффектпен артықшыланады). МОҚ мысалы ретінде ҒС МОО мен МОЭ — нің айналмалы корпусы бола алады.
Бізге жақсы белгілі сфералық магниттік демпфер, қосу — өшіру элеменнтерімен белгілі МОҚ — бізге белгілі МҚ береді. МОЭ-ге магнитогистерезисттік стерженьдер мысал бола алады.
Бірақ та магниттік басқару құрылғалары, басқа құрылғылар сияқты пассивті деп атайды, бірақ біздің жағдайымызда электроэнергия жұмсалуына байланысты «активтілік» және «пассивтілік» түсінігін қарастырамыз.
МЖ және МҚ активті, жартылай активті (жартылай пассивті), пассивті және комбинирлеген болып бөліп қарастырамыз.
Активті түсінігіне МОО–ның қосулы күйіндегі электроэнергияның үздіксіз қолданатын басқару құрылғыларын айтады. МЖ арасында — МОО жүйелері, мысалы, ферромагниттік орталығынсыз тегіс ток тасымалдаушы катушка түрінде және стержень электромагнит түрінде көрсетіледі. МҚ аналогты МОО байланыса алады, бұл жағдайда, әрине, олар МҚ функционар процессі кезінде басқара алмайды.
Пассивті басқару құрылғылары — бұл тұрақты магниттен, қатты магниттік және жұмсақ магниттік материалдарынан тұратын композиционалды МОО, магнитогистерезисттік және токовихресттік МОЭ тұратын құрылғы болып табылады.
Жартылай активті (жартылай пассивті) құрылғылар деп, МЖ датчиктерімен байланысқан электроэнергия тұтынуды айтады.
Ал, енді, соңғысы, комбинирленген құрылғыларға, активті, жартылай активті және пассивті құрылғылардан тұратын тіркесулерді жатқызамыз.
Автономды шегіне қарай автономдық, автономдық емес және комбинирленген МҚ деп бөлінеді.
АвтономдықМҚ — бұл Жермен және басқа объектілермен байланысқа түспейтін, балық элементтері ҒА — ның бортында орналасқан жүйелер болып табылады.
Автономды емес МЖ — ның датчиктері мен орындаушы құрылғары бортта орналасады, ал функционалды блогі немесе оның бөлігі Жерде немесе басқа объектіде орналасады. Жүйенің замыкания үшін міндетті түрде екіжақтық радиотелеметрлік желі сызығы «ҒА борты — Жер» қажет.
Комбинирленген МЖ — бұл автономды режимде, автономсыз режимде де жұмыс жасай алатын жүйелерді айтады.
Магниттік нәрселерді басқару жағынан қарастырған кезде, келесі аспекттерді ескерген жөн. Біріншіден, МОО басқару функцияларының түрлеріне қатысты релейные және сызықтық МЖ қарастыруға болады. Екіншіден, ҒА үздіксіз басқарылған кезде, яғни, үздіксіз басқарумен орбитаның кейбір бөліктерінде ғана берілген кезде, МЖ импульстік басқаруды ескерген жөн. Сол, немесе басқа жағдайда да басқару заңы сызықты, немесе сызықты емес болуы да мүмкін. Үшіншіден, МЖ жылдамдық немесе электроэнергия тұтыну кезінде оптималды немесе оптималды емес те болуы мүмкін.
Бағдар мен базалық координата жүйесінің күйі магниттік құрылғыларды мынадай түрге бөлумен анықталады: Жердің магниттік өрісінің В векторы арқылы алынған МЖ және МБ тұрақтандаруы.
МЖ және МБ қолданылу принципі магниттік моментті басқару физикалық қалыптастыру күйін жанамалайды.
МОО біздер олардың түріне қарай, ҒА корпусының ұтқырлық дәрежесіне және ҒА корпусының байланыс түріне қарай бөлеміз. МОО мынадай түрлері белгілі: электромагниттік стержень түрінде — электромагниттік МОО; ферромагниттік өзексіз катушкалық МОО; тұрақты магнит түрінде, перемагниттелген тұрақты магниттер, үсті жағынан өткізілген магниттер, комбинирленген және композицияланған МОО, магниттік қатты және магниттік жұмсақ материалыр немесе әр түрлі сортаменттен тұратын магниттік материалдар және түрлі қасиеттерімен бірге; магнитогистерезисттік, құйынды тоқ, гистерезисттік — құйынды тоқ орындаушы элементтер түрінде беріледі.
МОО ҒА корпусына қатысты ұтқырлық дәрежесі және ҒА корпусына қатысты байланыс түрі мынадай бөлумен қарастырылады:
− жылжымалы, жылжымалы емес және жартылай жылжымалы МОО және МОЭ, жартылай жылжымалы негізінде МОО және МОЭ жұмысы кезінде бірнеше тұрақталған позиция құрылғылары орын алуы мүмкін;
− қатты, серпімді байланысқан, тұтқыр немесе комбинирленген үйкеліскен, құрғақ байланысқан МОО және МОЭ.
Ең соңғы қорытындыға келетін болсақ, МОҚ және магниттік басқару құрылғылары момент басқару жерінен қарастырылуға болады, яғни, ол ҒА корпусына немесе маховиктерге қолданбалы болуы қажет [1].
Бағдар теңдеулерін шешкен кезде, ғарыштық серіктің қалған нутациялық қозғалысын активті магнитті әдісімен дымқылдату мүмкін болмайтын өшіру проблемасы кездесіп жатады. Ғарыштық серіктің сииметрия осінің нутациялық ауытқуын нутациялық пассив дымқыл арқылы бәсеңдетуге болады. Өзіңдік айналымының ортогональды осінің, ғарыштық серіктің басты осінің біріне бағытталған, маховик түріндегі депмферді қолданамыз (1-сурет).
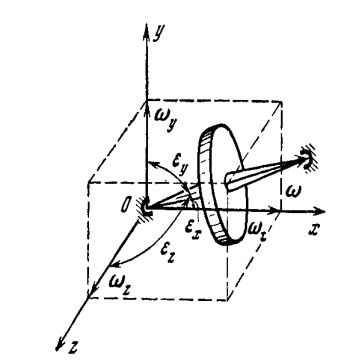
1-сурет. Маховикпен демпферлеу
Алдымен, маховиктің симметрия осі Ох осі бойына бағыттаған болсын. Жасанды серіктің симметрия осі бойымен жүретін нутациялық тербелістер демпфрлеу үшін маховиктің Ох осіне перпендикуляр орналастырамыз. [2]
Мұндағы: маховиктің инерция осьтік моменті –![]() , оның бұрыштық жылдамдығы -
, оның бұрыштық жылдамдығы -![]() жасанды серікке қатысты маховик осінің үйкеліс коэффициенті –
жасанды серікке қатысты маховик осінің үйкеліс коэффициенті –![]() . Сонда жасанды серіктің маховикпен бірге келетін кинетикалық моменті мынадай түрге келеді
. Сонда жасанды серіктің маховикпен бірге келетін кинетикалық моменті мынадай түрге келеді
![]() .
.
Мұнда, динамикалық симметриялық жасанды серік екенін қарастырамыз және ![]() осі — симметрия осі болып келеді. Эйлердің динамикалық теңдеулері мынадай түрге ие
осі — симметрия осі болып келеді. Эйлердің динамикалық теңдеулері мынадай түрге ие
![]()
 (1)
(1)
Мұндағы M1, M2, M3– байланысқан ось орналасқан сыртқы моменті проекциялары.
Маховиктің салыстырмалы қозғалысы мынадай теңдеумен беріледі
![]() (2)
(2)
Өлшемсіз коэффициенттерді жазамыз
![]()
және айналмалы
![]()
![]()
![]()
(1), (2) теңідеулерін сыртқы моменттерді есептемей отыра өлшеусіз күйге келтіреміз
![]() (3)
(3)
Жасанды серікті симметрия осі айнасында жылдам қозғалыста есептейміз және гироскопиялық момент жасанды серік қозғалысының айқындауышы деп есептейміз.Сонда екінші құрамдас бөлігін үшінші теңдеуде (3) елемеуге болады.Сондықтан да, ![]() . (3) теңдеуіндегі қалған бөліктер теңдеудегі жылдамдық компоненттері бойынша сызықты болып қала береді. [2]
. (3) теңдеуіндегі қалған бөліктер теңдеудегі жылдамдық компоненттері бойынша сызықты болып қала береді. [2]
 (4)
(4)
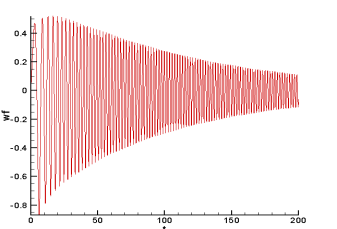
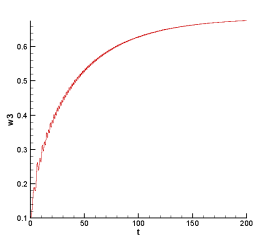
Сандық әдіс арқылы қозғалыс теңдеулері (3) және (4) теңдеулері есебінен маховик жасанды серік жүйелері алынды. и полученные зависимости ![]() — дің уақыттан тәуелділіктері алынған болатын. Ол тәуелділіктер 2–5 суреттерінде көрсетілген.
— дің уақыттан тәуелділіктері алынған болатын. Ол тәуелділіктер 2–5 суреттерінде көрсетілген.
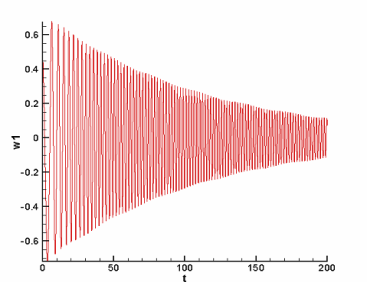
2-сурет. ![]() уақыттан тәуелділігі
уақыттан тәуелділігі
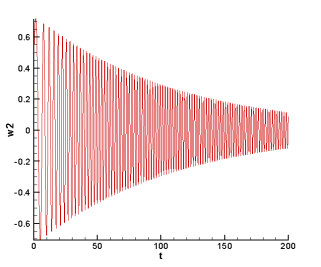
3-сурет. ![]() уақыттан тәуелділігі
уақыттан тәуелділігі
4-сурет. ![]() уақыттан тәуелділігі
уақыттан тәуелділігі
5-сурет.![]() уақыттан тәуелділігі
уақыттан тәуелділігі
Алынған нәтижелер маховик осі жасанды серіктің инерция бас осі бойына бағытталған маховиктің көмегімен Жердің айналу осіне параллель бағдарланған жасанды серіктің симметрия осінің нутациялық тербелістерін жоғалуын келтіруге болатынын көрсетеді. Және ескере кететін жағдай маховиктің бұрыштық жылдамдығы айналу осі бұрыштық жылдамдығына тең болуы қажет, бірақ қарама-карсы бағытталады.
Әдебиет:
- А. П. Коваленко, Магнитные системы управления космическими летательными аппаратами.М:Машиностроение,1975г. -248 с.
- Овчинников М. Ю., Пеньков В. И., Ильин А. A., Селиванов А. С., Алгоритмы управления ориентацией российского наноспутника ТНС-1 // Актуальные проблемы авиационных и аэрокосмических систем: процессы, модели, эксперимент, 2005, т.10, № 1(19), С. 78–101.

