Представлен взгляд на организацию структуры виртуального промысла и её функционирование в составе адаптивной кибермодели в качестве самонастраивающейся системы.
Данная статья продолжает представление кибернетического подхода к освоению месторождений, подобных Бакчарскому железорудному месторождению (БЖРМ), заявленному в работах [1–3]. В основу виртуального промысла может быть предложена модель Глушкова [4], предложенная в качестве кибернетического подхода к управлению макроэкономическими системами, описываемыми нелинейными уравнениями. Особенностью этой модели является оптимизация номенклатуры ресурсных источников и выпускаемых товарных продуктов на базе критического критерия при учёте как медленных, так и быстрых (по сравнению с плановым периодом) изменений коэффициентов уравнений. В рамках модели Глушкова последовательно производят оптимизацию параметров/показателей состояния системы в выбранный отрезок времени внутри планового периода, определяют экспертным путём в диалоговом режиме критический критерий, наиболее сильно влияющий на оптимальное состояние системы. Затем, используя этот критический критерий, задают заведомо напряжённый план выпуска товарных продуктов на следующий отрезок времени внутри планового периода и путём минимизации и/или ликвидации невязок устанавливают оптимальный для данного отрезка времени режим функционирования системы. Далее подобное итерационное действие последовательно повторяется с новой вводной информацией, вплоть до достижения конца планового периода.
Предлагается развить указанный подход путём организации не последовательной, а параллельной схемы оптимизации в качестве автоматического управляющего действия, в так называемой нами «джойстик-модели» или «джойстик-режиме». В данном контексте управляющий виртуальный орган — «джойстик» функционально связан со всеми контролируемыми параметрами/показателями виртуального промысла и следит за нахождением всей системы одновременно в контуре оптимального поля допуска значений параметров/показателей. При выходе состояния системы за пределы контура «джойстик» автоматически возвращает систему в контур оптимального поля. При этом может использоваться в качестве критических критериев несколько параметров/показателей добычного промысла, например, как предусмотрено техническим решением в случае с БЖРМ [1] — уровни добычи железа и других компонентов руды; продуцируемого в горной выработке биогаза; органоминерального субстрата. Реализация предложенного подхода может иметь вид, представленный на Рис. 1.
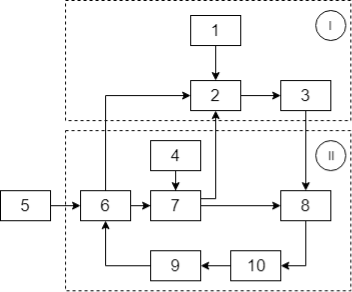
Рис. 1. Схема работы виртуального промысла: 1 — алгоритм эталона поведения добычного промысла; 2 — вычислительный комплекс; 3 — блок настройки; 4 — задатчик; 5 — возмущающее воздействие; 6 — управляемый объект; 7 — измеритель; 8 — преобразователь; 9 — регулятор; 10 — исполнительный блок; I — контур самонастройки; II — контур стабилизации
Как уже отмечалось [3], реальная обстановка эксплуатации добычного промысла на БЖРМ может характеризоваться отсутствием достоверных данных о динамических параметрах объекта, либо их нестационарностью, либо нестационарностью внешних возмущающих факторов, что предопределяет необходимость автоматической перенастройки параметров регулятора. Представленная блочная схема (Рис. 1) состоит из контура самонастройки I в составе блоков 1, 2, 3 (блок 3 — виртуальный «джойстик») и основного контура стабилизации II регулируемых параметров в составе блоков 4–10. Эта схема обеспечивает адаптивность кибермодели добычного промысла к возмущающим воздействиям 5.
В контуре самонастройки I алгоритм эталона поведения добычного промысла 1 имитирует оптимальное динамическое поведение адаптивной системы как интегратор дифференциальных уравнений, согласно которым планируется работа виртуального промысла. Эти дифференциальные уравнения формируются с учётом всех факторов, действующих на систему [3], включая обратные связи [2], и, следовательно, поведение добычного промысла является эталоном. Алгоритм 1 математически устанавливает критерий оптимальности, который вводится в вычислительный комплекс 2. Кроме этого, в вычислительный комплекс 2 поступают сигналы с входа (блок 7) и выхода (блок 6) контура стабилизации II. В блоке 2 поступившие сигналы подвергаются обработке, в результате которой определяется действительный критерий качества адаптивной системы. На основании сравнения критерия оптимальности и критерия качества определяется сигнал управления контура самонастройки I, направляемый на виртуальный «джойстик» — блок 3, который оказывает управляющее/настраивающее воздействие через преобразователь 8, исполнительный блок 10 и регулятор 9 на управляемый объект 6. При этом в контуре стабилизации II параметры регулятора автоматически изменяются таким образом, чтобы поведение добычного промысла «подогнать» к эталонному поведению виртуального промысла.
Дальнейшее развитие адаптивной кибермодели добычного промысла в части доработки виртуального промысла перспективно, по нашему мнению, в направлении создания самоорганизующей системы, в которой структура системы изменяется в зависимости от изменения внешних возмущений или внутреннего состояния системы.
Литература:
- Заявка на выдачу патента РФ № 2018139445/20(065490) от 07 ноября 2018 г.
- Лунев П. С. Адаптивная кибермодель добычного промысла: идея, схема, связи // Молодой ученый. — 2018. — № 51. — С. 11–12.
- Лунев П. С. Адаптивная кибермодель добычного промысла: исходные данные и условия // Молодой ученый. — 2019. — № 5. — С. 14–15.
- Глушков В. М. Диалоговые макроэкономические модели / В кн.: Кибернетика. Вопросы теории и практики. — М.: Наука, 1986. — С. 375–387.

