Нейробасқару нейрондық желілерді қолдануға негізделген заманауи басқару теориясының бөлігі ретінде күрделі динамикалық жүйелерді басқару міндеттерін шешу үшін соңғы жылдары белсенді түрде дамуда. Нейробасқару міндеттерін шешуге жүйелік қадам түрлі конструктивті-функционалдық элементтерден тұратын нейрондық желіге негізделеді. Нейрондық желі жоғары параллельді динамикалық сызықты емес жүйе болып табылады. Оның конфигурациясы басқарудың шешілетін міндетіне және талап етілетін шығыс реакцияға бапталып, қоршаған ортаның параметрлеріне байланысты. Нейробасқаруды әске асыру кезінде айнымалы параметрлері бар жүйелерді сызықты емес дифференциалдық теңдеулермен сипаттау қажеттігі туындамайды.
Түрлі объектілерді тұрақтандыру жүйелерінде ПИД-реттегіштерді кеңінен қолдану факторларына олардың құрылымдарының қарапайымдылығы мен жоғары сенімділік жатады. Жуық шамадағы деректер бойынша [1] жапон кәсіпорындарының 84 %-да осы күнге дейін ПИД-контроллерлер пайдаланылады. Бұл контроллерлерде оператор сапа көрсеткіштерінің жақсартылуына қолжеткізе отырып, үш параметрлерді басқаруға болады. Алайда кемшілігі болып жұмыс нүктелерінің өзгеруі кезінде әсерлердің арқасында контроллерді қайта баптау қажеттігі табылады [2].
Үздіксіз жұмыс режимі бар ірі кәсіпорындарда мұндай контроллерлерді пайдалану кезінде мұқият бақылауды талап етеді, яғни персонал саны көбейеді. Сонымен қатар, айнымалы параметрлері бар, кешігуі бар, нақты сызықтық еместігі мен едәуір бөгеуілдері бар процестер үшін ПИД-контроллерлерді пайдалану тиімді емес болуы мүмкін. ПИД-реттегіштерді баптау қиындығы оңтайлы баптауларды іздеумен түсіндіріледі және нәтижесінде процесс динамикасын бөлшектеп оқу қажеттілігі 80 % сызықты реттегіштердің оңтайлы емес режимде жұмыс істейтіндігіне алып келді [3].
Заманауи жағдайларда басқару жүйесін жасау кезінде математикалық моделі күрделі немесе белгісіз объектіні басқару талап етіледі. Бұл кезде басқару жүйесіне синтез классикалық әдістермен шектен тыс күрделі немесе мүмкін емес болып келеді. Мұндай міндетті шешу үшін адаптивтік басқару әдістері жақсы болып келеді [4].
Қазіргі уақытта өнеркәсіптік ендіру кезеңінде және тәжірибе-өнеркәсіптік жасалымдар немесе таза теориялық ұсынымдарда орналасқан нейрожелілік алгоритмдері бар адаптивтік басқарудың әр түрлі әдістері белгілі. Олардың барлығы өз құрылымында реттеудің классикалық (ПИД) алгоритмдерін және басқарудың адаптивтік (нейрожелілік) алгоритмдерінен тұрады. Бірақ үлкен артықшылықтарға ие болып олардың оңтайландырудың шектелген кеңістікке ие, бұл оңтайлы басқарушы әсерлерді іздеу нұсқаларын қысқартады. Сонымен қатар, олар көп параметрлік басқарудың жүргізе алмайды және адаптацияға әлсіз ұшырайды, себебі әр ПИД-реттегіштің бапталуы бір-бірінен жеке іске асырылады, яғни басқарушы әсерлерді түзету кезінде сызықтық емес өзара байланыс ескерілмейді.
Осылайша, аса маңызды болып реттегіштердің адаптациялық қасиеттерін арттыру табылады. Күрделі технологиялық процеспен басқару сапасын жақсарту үшін нейрожелілік алгоритмдердің негізінде басқарудың автоматтандырылған жүйесінің құрылымын пайдалану ұсынылады (сурет 1).
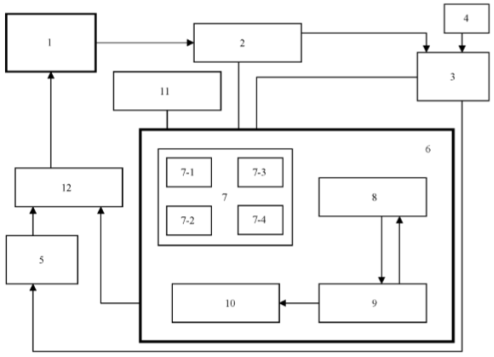
Сурет 1 Нейрожелілік алгоритмдер негізінде автоматтандырылған басқару жүйесінің құрылымы
Күрделі технологиялық процесті басқару үшін нейрожелілік реттегіш ақпараттық-есептеу кешені түрінде орындалады да, келесі негізгі блоктардан тұрады: басқару объектісі 1; басқару объектісінен алынған деректерді түрлендіруді іске асыратын деректерді алғашқы өңдеу блогы 2; деректерді енгізу/шығару блогы 3, немесе тапсырма келетін жүйе мен пайдаланушының өзара әсерін іске асыратын пайдаланушының графикалық интерфейсі 4; ПИД-реттеу алгоритмін іске асыратын блок 5, мұнда датчик көрсеткіштерінің негізінде орындаушы механизмге басқарушы әсер қалыптасады. Көп параметрлерді басқару блогы 6 төрт негізгі блоктардан тұрады: жүйенің жұмыс тарихының блогы 7 (құрамдас бөліктер: 7-1 – басқару объектісінің жұмыс параметрлерін жинау блогы, 7-2 – жұмыс массивтерін қалыптастыру блогы, 7-3 – тиімділік коэффициентінің формула блогы, 7-4 – тиімділік коэффициентінің мәндерін жинау блогы). Блок жеке блоктар үшін деректердің түрлі таңдалымдарын қалыптастырады және жүйенің негізгі параметрлерін жинақтауды, сонымен қатар интеллектуалды классификатордың 8 жүйе жұмысының тиімділік коэффициентін есептеуді іске асырады. Интеллектуалды классификатор деректердің массивтерін (модельдеу 9 мен басқару 10 блоктарының жұмысы үшін) қалыптастырады және таратады, нейрожелілік алгоритмдер көмегімен алынған шешімнің сапасын іске асырады. Басқару әдісін таңдау блогы 12 модельдеу блогынан 9 алған баға негізінде қандай да бір критерий бойынша жүйенің басқарылатын әр параметрі үшін басқару әдісін таңдайды, яғнибасқару мақсатына жетуді оңтайландырып, ПИД-реттегішке немесе көп параметрлі реттегішке басқаруды беру туралы шешім қабылдайды.
Жүйе негізгі режимдердің тізбектей іске асырылуын қарастырады: деректерді дайындау, оқыту және деректерді өңдеу. Жүйенің деректерді дайындау және оқыту режимдерінде болған кезде көп параметрлік басқарудың блогы объектіні басқаруда қатыспайды.
Деректерді дайындау режимі үш байланысқан процестерден тұрады: басқару объектісінің жұмысы туралы бастапқы векторларды қалыптастыру, оларды идентификациялау және басқару объектісі деректерінің жұмыс массивтерін жасау.
Басқару объектісінің 7-1 жұмысы туралы деректер басқару объектісі жұмысының параметрлерін жинақтаудың берілген блогымен жиналады. Ары қарай басқару объектісінің жұмысы туралы бастапқы векторлардың идентификациясы іске асырылады. Идентификациялық белгілеросы векторлардың айырықша қасиеттеріне сәйкес және басқару объектісінің жұмысы туралы ақпаратты береді. Деректердің жұмыс массивтерін жасау процесі жұмыс массивтерін қалыптастыру блогымен 7-2 іске асырылады да, блоктағы 7-1 әр қалыптасқан басқару объектісі деректерінің бастапқы векторына сәйкес келеді.
Басқару объектісі жұмысының параметрлерін жинау блогымен 7-1 деректерді жинақтау жүйенің барлық жұмыс режимдерінде үздіксіз орындалады. Деректерді дайындау режимі аяқталған кезде жүйенің жұмыс режиміне байланысты ары қарай оқыту, өңдеу сияқты операциялар іске асырылады.
Оқыту режимінде жүйенің барлық интеллектуалды блоктарының параметрлер адаптациясы шығыс ақпаратына қойылатын талаптарға сәйкес іске асырылады: басқару 10, модельдеу 9 блоктары және тиімділік коэффициенттерінің формулалары 7-3. Оқытуды жұмыс массивтері қалыптасатын блоктарда 7-2 іске асырады. Оқыту процесінде алынған тиімділік коэффициенттерінің мәндері интеллектуалды классификатор блогымен 8 ары қарай талдау үшін тиімділік коэффициентінің 7-4 мәндерін жинау блогына жазылады.
Оқыту процедурасы аяқталған соң деректердің кіріс/шығыс блоктарының 3 көмегімен деректерді өңдеу процедурасының режимдері (автоматтық және қолмен басқару) орнатылады.
Автоматтық режимде жүйе деректерді өңде процедурасын іске асыру кезінде интеллектуалды классификатор блогында жүйенің тиімділік коэффициенті мәндері бойынша және жүйенің жұмыс сапасының параметрлері бойынша басқарудың оңтайлы стратегиясын анықтайды немесе режимнің ауысуын іске асырады.
Қолмен басқару режимінде деректерді өңдеу процедурасын іске асыру кезінде деректердің кіріс/шығыс блогына 3 жүйемен шығарылатын тиімділік коэффицентін, жүйенің жұмыс режимінің сапа параметрлерін және басқа да көрсеткіштерін өздігінен талдап, оңтайлы басқару стратегиясын немесе режимді ауыстыруды оператор орындайды.
Осылайша, күрделі технологиялық процесті басқару үшін ұсынылатын нейрожелілік реттегіш жүйенің адаптациялық қабілеттіліктерін арттыру арқылы басқару объектісін басқару сапасын жоғарылатуға мүмкіндік береді.
Әдебиет:
- Аведьян Э.Д. Алгоритмы настройки многослойных нейронных сетей // АиТ. – 2005. - № 4. – С. 106–118.
- Автоматизация синтеза и обучение интеллектуальных систем управления. / Под ред. И.М. Макарова и В.М. Лохина. – М.: Наука, 2009. – 228 с.
- Беспалов А.В., Харитонов Н.И. Системы управления химико-технологическими процессами. – М.: Академкнига, 2007. – 696 с.
- Бояринов А.И., Кафаров В.В. Методы оптимизации в химической технологии. – М.: Химия, 2005. – 564 с.

