





В данной статье рассмотрен пример реализации генератора сигнала с фиксированной (заранее заданной) частотой.
Ключевые слова: AVR, микроконтроллер, генератор сигнала.
Сигналы с фиксированной (заранее заданной) частотой применяются в работе различных систем индикации режимов работы, а также для тактирования систем управления. Для визуализации работы генератора сигнала, на выход микроконтроллера подключен светодиод D1 и ток ограничивающий резистор R1, по схеме, приведенной на рисунке (Рис1.).
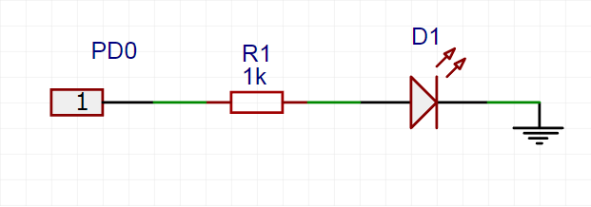
Рис. 1. Схема подключения светодиода
Во-первых, требуется определить частоту работы микроконтроллера. Для этого создадим макрос при помощи директивы #define, с параметром “8000000” (Рис2.).
Рис. 2. Команда определения частоты работы микроконтроллера
Далее для работы с задержками, применяется библиотека delay.h. Подключение о библиотеки выполняется при помощи директивы #include (Рис3.).
Рис. 3. Подключение библиотеки для работы с задержками
Для работы с портами ввода-вывода микроконтроллера применяется библиотека io.h (Рис. 4.).
Рис. 4. Команда подключения библиотеки для работы с портами микроконтроллера
Конфигурацию портов микроконтроллера производится в функции main, в нее помещается настройки порта PD0. Порт PD0 настраивается на выход с начальным логическим уровнем 0(Рис. 5.).
Рис. 5. Конфигурация портов
Также в функцию main помещается цикл while. В цикле прописан код непосредственно генератора тактового сигнала. Генератор реализуется при помощи инвертирования логического значения на ножке PD0 через равные промежутки времени (задержки), используя команду ” _delay_ms(100)”(Рис. 6.).
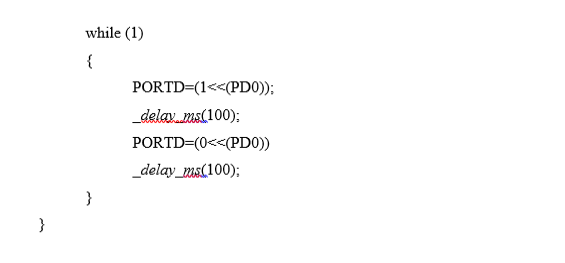
Рис. 6. Код генератора сигнала
На этом программную реализацию генератора тактового сигнала можно считать завершенной.
Литература:
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода: Учеб. для вузов.– 6-е изд., доп. и перераб.– М.: Энергоатомиздат, 1981.– 576 с.
- Томашевский Н. И. и др. Типовые задания к курсовому проекту по основам электропривода — Свердловск: Изд-во Свердл. инж.-пед. ин-та, 1989. — 48 с.
- Шрейнер Р. Т. Системы подчиненного регулирования электроприводов. Ч. 1: Электроприводы постоянного тока с подчиненным регулированием координат: Учеб. пособие для вузов. — Екатеринбург: Изд-во Урал. гос. проф.-пед. ун-та, 1997.– 279 с.
- Прайс-лист НПО «Электропроект» от 28.04.2004г. (www.elp.ru)
- Standard C library for AVR-GCC [Электронный ресурс]. — Режим доступа: http://www.nongnu.org/avr-libc/user-manual/index.html.
- Atmel Studio 7 [Электронный ресурс]. — Режим доступа: https://www.microchip.com/avr-support/atmel-studio-7.
