




Ключевые слова: асфальтоукладчик, уплотнение смеси, скорость движения, ходовая часть, Matlab-Simulink, имитационная модель.
Строительство автомобильной дороги состоит из технологических процессов, выполняемых в определенной последовательности и требующих больших затрат материальных и трудовых ресурсов. Снижение этих затрат может быть достигнуто массовым внедрением в дорожное строительство комплексной механизации и автоматизации технологических процессов.
Значительные перемены произошли в технологии строительства дорог с асфальтобетонными покрытиями. Современные асфальтоукладчики позволяют обеспечивать более высокую степень предварительного уплотнения асфальтобетонных смесей. Это не только снижает затраты на их дальнейшее уплотнение, но и улучшает качество покрытия. Асфальтоукладчики оснащены автоматическими системами обеспечения продольного и поперечного профиля, блокировки привода хода и рабочих органов.
Наибольшее распространение в промышленности получили системы автоматического управления технологическими процессами с ПИД-регуляторами. Особенностями технологического процесса дорожного строительства являются: выполнение процесса на открытом воздухе и зависимость от факторов погоды; изменения характеристик смеси и покрытия в течении времени; изменение толщины покрытия на разных объектах; технический уровень дорожно-строительных машин; квалификация рабочих, и другие. Таким образом, асфальтоукладчик, как объект управления, представляется как многомерная сложная техническая система (в зарубежной классификации система MIMO) состоящая из подсистем со своими системами автоматического управления (САУ). Скорость движения укладчика является значимым фактором, влияющим на качество асфальтобетонного покрытия автомобильной дороги. Известно, что при строительстве дороги скорость асфальтоукладчика должна быть постоянной от 1,6 м/мин до 3 м/мин.
Теория управления в классическом и современном понимании в основном основана на идее линеаризации систем. Идея предполагает наличие точной математической модели управляемого процесса. Однако, если рассматривать объект линейным, то математическое моделирование не всегда будет отражать действительные физические свойства объекта, учитывая наличие нелинейностей. Для дорожно-строительных машин нелинейности проявляются в гидравлическом приводе основных механизмов и агрегатов. Значительный экономический эффект достигался путем внедрения ПИД-регуляторов и микропроцессорной техники.
В современных условиях при необходимости модернизировать систему управления производится замена контроллеров на более мощные. Отсутствие возможности изменений закона ПИД-управления не приносит желаемого эффекта модернизации. Также известно, что изменяя задание для контура управления, необходимо перенастроить коэффициенты ПИД-регулятора под новый режим работы. Процедура перенастройки коэффициентов в большинстве случаев не выполняется на производстве.
Объектом исследования в магистерской диссертационной работе являются методы автоматизации процессом управления скоростью движения асфальтоукладчика.
Актуальность задачи определяется необходимостью улучшения системы управления скоростью укладки асфальтоукладчиком. При этом достигается снижение физической нагрузки на машиниста-оператора, улучшение качества дорожного асфальтобетонного покрытия.
Цель работы: разработка имитационной модели цифровой системы управления скоростью движения асфальтоукладчиком в программе MATLAB&Simulink.
Для достижения поставленной цели требуется решение следующих задач:
– анализ методов математического моделирования рабочего процесса асфальтоукладчика;
– разработка имитационной модели привода ходовой части асфальтоукладчика;
– проектирование регулятора системы управления скоростью движения асфальтоукладчика;
– построение цифровой модели системы управления скоростью движения асфальтоукладчиком на языке программы MATLAB&Simulink.
– исследование и анализ процесса цифрового управления модели объекта в среде MATLAB&Simulink;
– формирование выводов.
Современные асфальтоукладчики оснащаются системой автоматического регулирования, которая обеспечивает контроль и регулирование продольного профиля и поперечного уклона поверхности укладываемого покрытия. Ровность дорожного покрытия создается с помощью натянутого стального каната или бордюра, а также поверхности основания или покрытия соседней полосы.
Ходовая часть укладчика приводится в движение с помощью регулируемого объемного гидравлического привода. Функциональная схема САУ скоростью движения укладчика показана на рисунке 1.
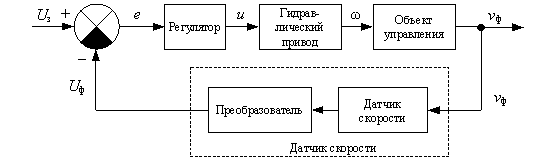
Рис. 1. Функциональная схема САУ: Uз — напряжение соответствующее заданной скорости укладчика; e — сигнал ошибки (e= Uз — Uф); u — управляющий сигнал; ω — частота вращения гидромотора; vф — фактическая скорость укладчика; Uф — сигнал, соответствующий фактической скорости укладчика
В гидроконтуре привода с объемным регулированием можно выделить силовую и управляющую части. Силовая часть включает в себя объемный насос с регулируемой подачей, вспомогательные устройства и регулируемый гидродвигатель объемного типа. Давление в ОГП составляет 25–45 МПа, в сливной магистрали — 2–3,5 МПа.
Имитационная модель асфальтоукладчика и его программная реализация выполнена в среде Matlab-Simulink c помощью блоков стандартной библиотеки и библиотек SimMechanics, Simulink. Связь имитационной и виртуальной моделей, а также оживление виртуальной модели реализуется с помощью блоков библиотеки Simulink, что отображено на рисунке 2. Принятые обозначения соответствуют переменным, используемым для описания математической модели асфальтоукладчика.
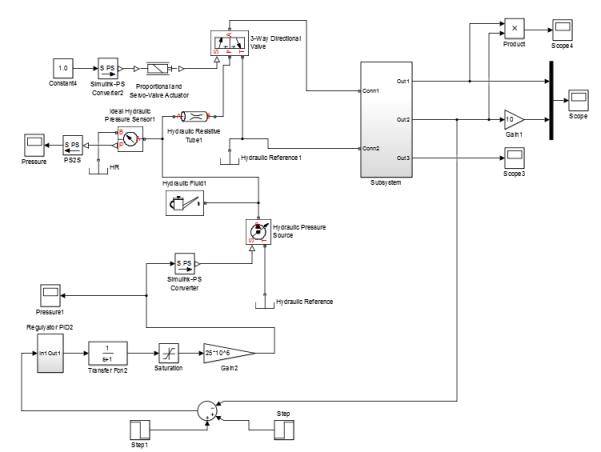
Рис. 2. Имитационная модель гидравлической системы асфальтоукладчика
В результате выполненной работы определена актуальность темы, объект исследования, предмет исследования. Сформулирована цель работы и определены задачи исследования. Выполнена подготовка теоретических данных и необходимых ресурсов для разработки имитационной модели процесса. Проведен анализ методов синтеза регуляторов системы управления.
Литература:
- Угай, С. М. Проектирование асфальтоукладчиков / С. М. Угай. Владивосток: ДВГТУ, 2009. 70 с.
- Справочник по асфальтоукладчикам Vogele. Советы и указания по укладке асфальтобетона асфальтоукладчиками [Электронный ресурс] // Virtgen Group. Режим доступа: http://www.b-construction.ru/assets/files/new-508_spravochnik_Vogele.pdf.
- Апарцев, А. З. Технологические схемы и правила укладки и уплотнения горячих многощебенистых асфальтобетонных смесей при устройстве покрытий автомобильных дорог / Апарцев А. З. СПб. Павловск, 1996. 51 с.
- Ишенко, И. С. Технология устройства и ремонта асфальтобетонных покрытии: учеб.пособие/ И. С. Ишенко, Т. Н.Калашникова, Д. А. Семенов. Москва: Лир-Лрт, 2001. 176 с.
- Олссон, Г. Цифровые системы автоматизации и управления / Г. Олссон, Д. Пиани. Санкт-Петербург: Невский Диалект, 2001. 557 с.
- Прокопьев А. П. Особенности синтеза регулятора нелинейной системы управления / А. П. Прокопьев, В. И. Иванчура, Р. Т. Емельянов // Вопр. соврем. науки и практики. Ун-т им. В. И. Вернадского. 2014. № 4(54). С. 72–80.
