Показано происхождение, назначение и роль алгоритмов адаптации в задачах управления, как инструмента, обеспечивающего качество управления. Показано, что качество управления зависит от удачного выбора и успеха решения задачи адаптации. Для современных задач адаптации нейросетевых адаптивных алгоритмов управления определена роль и значимость вычислительной системы (ВС), обеспечивающей устойчивость процесса адаптации на каждом шаге работы. Испытываемая ИНС имела импульсные блоки активации на всех нейронах. Показана логическая таблица термов параметрической адаптации ВС.
Проведены тестовые испытания работы в шаговом режиме алгоритма обратного распространения с динамической системой, управляемой прямонаправленной искусственной нейросетью (ИНС). Испытания показали степень влияния параметров динамических систем на синаптические веса (СВ) ИНС. Показано, что использованный в испытаниях известный метод обратного распространения (ОР) применим для прямонаправленных ИНС. Он обеспечивает устойчивость решения задачи адаптации и управления для ИНС с небольшим числом нейронов, но достаточно инерционен и сложен для расчетов ИНС с большим числом нейронов. Результаты испытаний показали на малую чувствительность СВ к отклонениям параметров простых объекта регулирования, а ИНС устойчиво работает на длительном интервале времени без выбросов значений СВ.
Сделан вывод о необходимости разработки для сложных, особенно рекуррентных ИНС численных эволюционных алгоритмов обучения и адаптации прямонаправленных и рекуррентных ИНС.
Ключевые слова: управление, адаптация, устойчивость работы системы управления, устойчивость алгоритма адаптации, вычислительная система, ВС, искусственная нейросеть, ИНС, синаптический вес, СВ, прямонаправленная ИНС, рекуррентная ИНС.
По определению Л. А. Растригина [1], понятие адаптация, как сами нейросети и генетические алгоритмы и имеют биологическое и социальное происхождение.
Так же как управление является образом осмысленного действия человека, адаптация является инструментом для его реализации. Источниками проблем управления являются неопределенности, как объектов, так и средств (органов) управления, а своевременность и качество адаптации на прямую направлены на повышение качества управления.
В последние 20 лет понятие адаптация стало фигурировать в математической, технической и особенно в кибернетической литературе [2]. И проявилось в методах реализации и оценки качества процессов управления.
К настоящему времени выделены структурная и параметрическая адаптация. [1]. Для динамических систем, работающих в шаговых режимах в основном используется параметрическая адаптация. Она обеспечивает устойчивость работы систем управления. И в современных алгоритмах адаптации появился новый объект адаптации, вычислительная система (ВС), а адаптивная система на каждом шаге работы приобрела новое функциональное назначение — система многопараметрической оптимизации [2], и стала обеспечивать устойчивую работу на каждом шаге работы.
В шаговых алгоритмах параметрической адаптации кроме интегральных параметров, обеспечивающих качество управления по классическим показателям, появилась возможность влияния на интенсивность воздействия на темпы процесса адаптации. В шаговых режимах это воздействие обеспечивает работоспособность и заданный запас устойчивости работы динамических систем.
В настоящей работе показаны некоторые результаты параметрической шаговой адаптации при отклонениях параметров динамической системы и действия ступенчатых и случайных возмущений для различных режимов (частотах) работы ВС. Показана работа алгоритма обратного распространения в системе с прямонаправленной ИНС.
Целью исследования было испытание алгоритмов адаптивного регулирования с программами ВС минимальной сложности для их внедрения в библиотеки стандартного программного обеспечения промышленных контроллеров общего назначения.
В настоящее время полевые контроллеры общего назначения являются основой технического перевооружения малых и средних производственных комплексов. По нашему мнению, решение рассмотренной проблемы надо искать на пути повышения интеллекта новых технических средств. Особенно это актуально для объектов малого и среднего бизнеса, в котлах и у потребителей в коммунальном хозяйстве малых поселений в РФ. В РФ они повсеместно заменяют агрегатные технические средства шестидесятых лет выпуска прошлого столетия. Массовое перевооружение технических средств автоматизации требует достаточно больших объемов капиталовложений, как на основное оборудование и средств автоматизации, так и на строительно-монтажные работы и наладку. Это предъявляет высокие требования к эффективности и качеству работы внедряемого инновационного оборудования.
Известно [3], что традиционно «узким местом» на пути повышения качества даже простых схем регулирования является их неудовлетворительная настройка. Не редко, качество работы обновленных технических средств не удовлетворяет современным требованиям. Их наладка требует привлечения квалифицированных специалистов. Таких специалистов мало. Они стоят дорого. И, как, следствие, современные не дешевые контроллеры не обеспечивают ожидаемого качества работы.
Кроме того, как показывает, опыт после первой остановки или изменения режима работы объекта регулирования начальные настройки становятся не оптимальными, а иногда и не допустимыми.
По нашему мнению, решение рассмотренной проблемы надо искать на пути повышения интеллекта новых технических средств. Особенно это актуально для объектов малого и среднего бизнеса, в котлах и у потребителей в коммунальном хозяйстве малых поселений в РФ. На этих объектах нет, и не предвидится появление квалифицированного эксплуатационного персонала.
В настоящей статье предлагаются на обсуждение некоторые результаты исследования работы импульсного (шагового) адаптивного регулятора с ИНС в функциональном блоке. Код программы его работы предназначен для включения в библиотеку инструментального программного стандарта МЭК 61.131–3 CODESYS [4] для реализации в промышленных полевых контроллерах ОВЕН.
На рис. 1 показана структурная схема одноконтурной автоматической системы регулирования (АСР) с работающим по принципу отклонения адаптивным регулятором
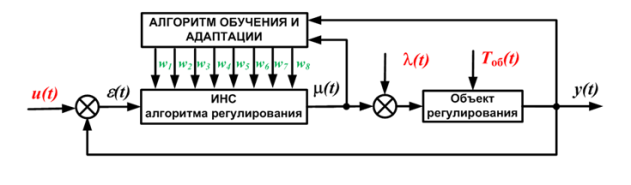
Рис. 1. Структурная схема АСР с адаптивной ИНС
Тестовым объектом регулирования, на котором исследована работа адаптивного регулятора, выбрана схема последовательного соединения трех апериодических звеньев.
Функция формирования регулирующих воздействий (t) в алгоритме адаптивного регулятора реализована прямонаправленной ИНС с шестью нейронами и восемью синаптическими весами. В схеме на рис. 1 показаны восемь значений синаптических весов w1, w2, …w7, w8 ИНС, являющимися искомыми параметрами адаптивного регулятора. Значения синаптических весов адаптивным алгоритмом подбираются к действию регулярных, ступенчатых и случайных возмущений по каналу регулирования (t), ступенчатых возмущений по каналу задания u(t), а также к ступенчатым и случайным изменениям постоянных времени трех апериодических звеньев Tоб(t).
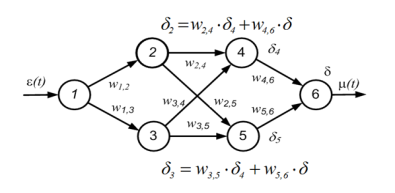
На рис. 2 показан сигнальный граф и матрица смежности настраиваемой ИНС [5,6,7].
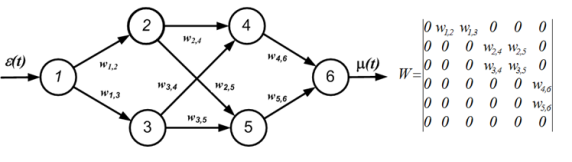
Рис. 2. Сигнальный граф и матрица смежности настраиваемой ИНС.
Для ее обучения использован известный метод обратного распространения ошибки [8]. Для адаптации (подстройки) параметров алгоритма регулирования к изменению параметров регулируемого объекта разработана и испытана в работе эксклюзивная логическая матрица для вычисления регулируемых воздействий на каждом шаге работы регулятора.
Ниже показаны некоторые результаты работы адаптивного регулятора.
а)
б)
в)
г)
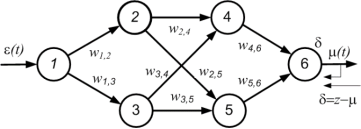
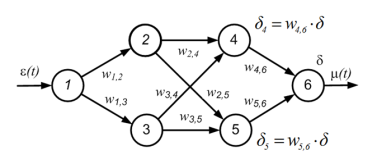
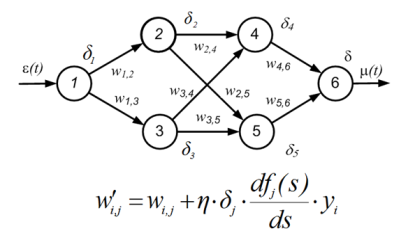
Рис. 3. Этапы последовательного расчета ошибок и синаптичеких весов w ИНС в процессе обучения методом обратного распространения ошибки
Первом шагом в методе обратного распространения ошибки является вычисление из выражения = z — ошибки сигнала на выходе шестого выходного нейрона (рис.3, а). Далее, послойно рассчитываются ошибки всех остальных нейронов от конца до начала ИНС. На рис. 3 б и 3 в показаны формулы вычисления ошибок на 5, 4, 2 и 3 нейронах.
После расчета всех ошибок на всех нейронах алгоритм приступает к вычислению новых значений синаптических весов ![]() по формулам, показанным на рис. 3 г, где - скорость обучения ИНС.
по формулам, показанным на рис. 3 г, где - скорость обучения ИНС.
Эксклюзивным в предлагаемой работе является алгоритм работы алгоритма регулятора. Для его работы не требуется, в классическом смысле, знание динамических свойств объекта регулирования. Работая в шаговом режиме, алгоритм использует память объекта в окрестности текущего шага. В предлагаемом в настоящей статье алгоритме используется память не выше второго порядка. В переводе на язык физического процесса; при выработке регулирующего воздействия адаптивный регулятор использует линейное изменение, скорость и ускорение линейного изменения только для текущего значения регулируемой величины. На следующем шаге эти все три показателя могут быть другими и, соответственно, будет вычислено другое значение регулирующего воздействия на объект регулирования. Эти же показатели текущей динамики объекта регулирования на каждом шаге работы адаптивного регулятора с соответствующими нормами используются для коррекции синаптических весов, т. е. адаптации регулятора к изменению параметров объекта регулирования.
В ИНС использованы импульсные активационные блоки.
На рис. 4 показана таблица логических термов параметрической адаптации, на которой стрелками отмечены направления и число импульсов для всех возможных термов состояния ИНС.
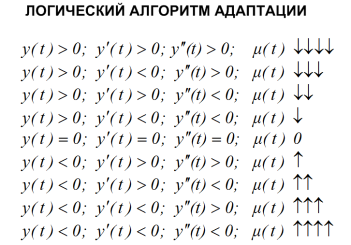
Рис. 4. Логические термы параметрической адаптации ИНС
Эффективность работы адаптивного регулятора испытана на шести экспериментах.
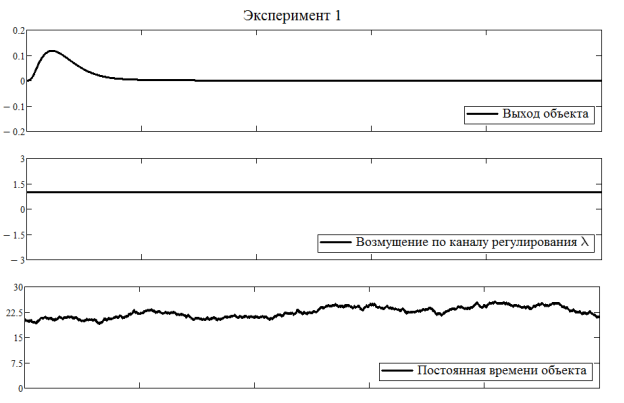
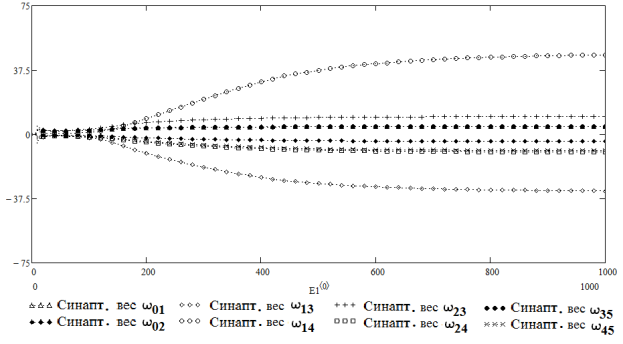
Рис. 5. Адаптация к случайным отклонениям параметров объекта регулирования при ступенчатом возмущении на объект по каналу регулирования
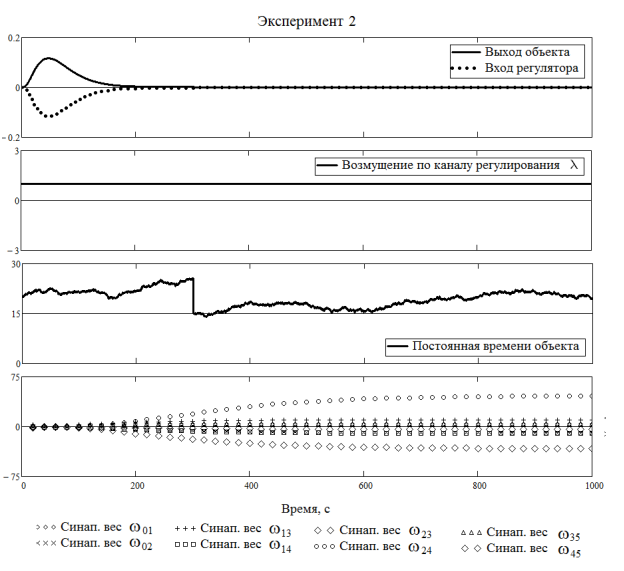
Рис. 6. Адаптация ИНС к случайным отклонениям параметров объекта регулирования и при ступенчатом возмущении на объект по каналу регулирования
Во втором исследовании возмущения по каналам возмущения и задания не поменялись, а в изменении постоянной времени добавился скачок.
Процесс регулирования практически не изменился, а по графику изменения синаптических весов видно, что скачкообразное изменение объекта не привело к переобучению нейронной сети. ИНС не заметила и не отреагировала на ступенчатое отклонение постоянной времени.
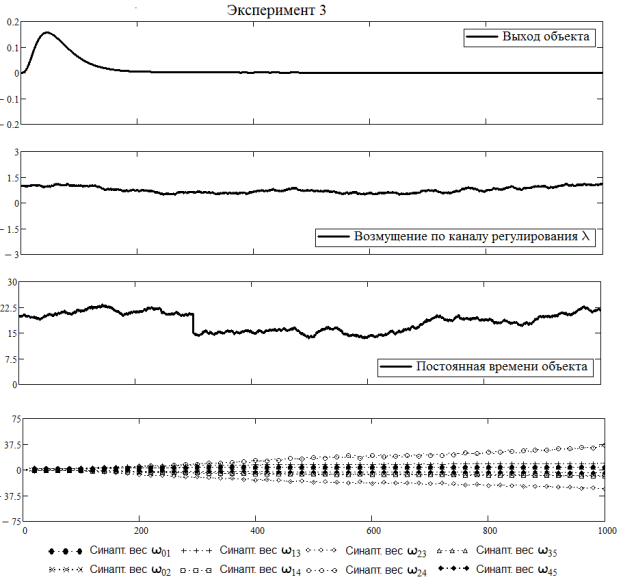
Рис. 7. Результаты тестирования работы ИНС к действию ступенчатого и случайного возмущений по каналу регулирования
Хорошо видна тенденция к обучению синаптических весов к действию возмущений при отсутствии внимания к случайным и ступенчатым отклонениям постоянной времени объекта регулирования.
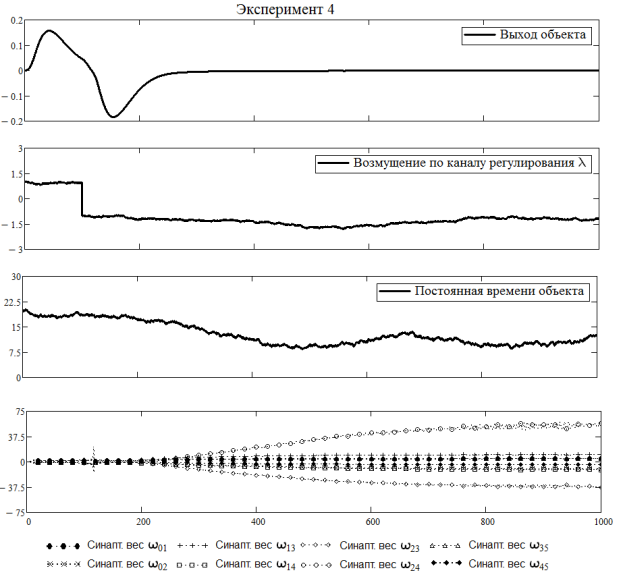
Рис. 8. Результаты исследования влияния ступенчатого возмущения по каналу регулирования
Из теста видно, что действия ступенчатого и случайного возмущений практически не сказались на значениях синаптических весов.
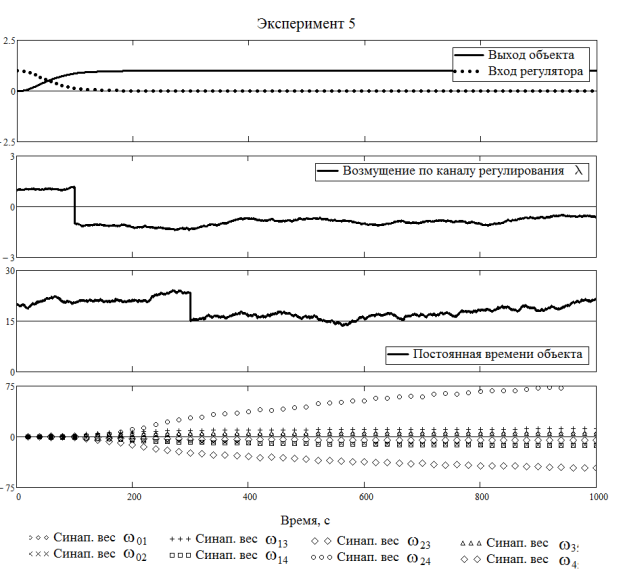
Рис. 9 Результаты исследования чувствительности синаптических весов ИНС к одновременному действию возмущений по каналу задания и регулирования
Показана небольшая чувствительность весов к действию возмущений.
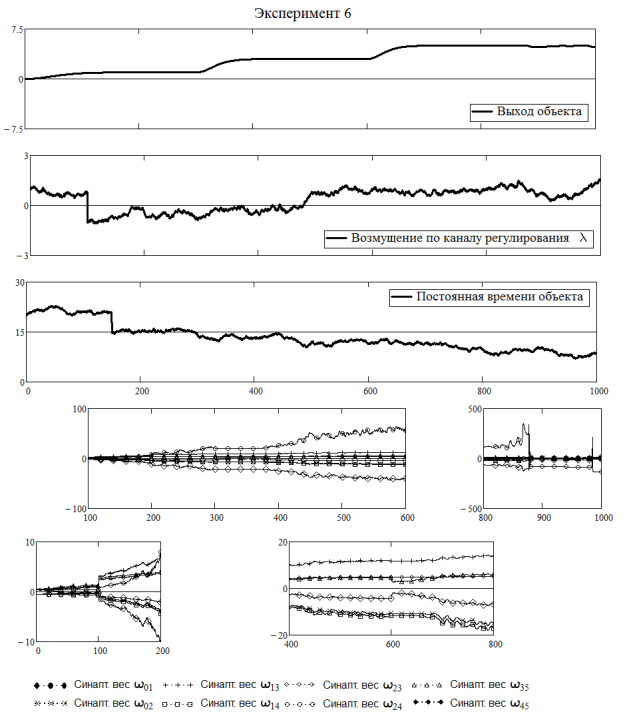
Рис. 10. Результаты исследования чувствительности ИНС к действию двух ступенчатых возмущений по каналу задания, случайного и ступенчатого возмущений по каналу регулирования и ступенчатого и случайного отклонения постоянной времени
Из фрагментов графиков видно, что значения синаптических весов проявляют чувствительность к действию возмущений. Однако на интервале времени исследования адаптивный нейрорегулятор устойчивости не утратил.
Выводы.
- Из графиков видна устойчивость алгоритма адаптации для всех шести тестов.
- Для испытываемого объекта изменения постоянной времени объекта мало влияют на значения СВ.
- Ступенчатые и случайные возмущения оказывают влияние на значения СВ. Однако на исследованном интервале времени потери устойчивости не наблюдалось.
- колебания синаптических весов. Нет необходимости переобучаться непрерывно, следует вводить период обучения, величину которого следует выбирать экспериментально.
- Данная разработка имеет своей целью встраивание чипа программы ИНС в библиотеку прикладного программного обеспечения ОВЕН.
- Интеграция программы ИНС с техническими средствами автоматизации потребует синхронизации работы алгоритмов управления, адаптации и исполнительного механизма.
- Для создания программ адаптации сложных динамических систем вместо алгоритма обратного распространения ошибки требуется разработка нового численного эволюционного алгоритма.
Литература:
- Растригин Л. А. Адаптация сложных систем. — Рига: Зинатне, 1981. — 375 с.
- Батищев Д. И. Поисковые методы оптимального проектирования. М., Сов. радио, 1975. 216 с.
- Проблемы создания и эксплуатации эффективных систем регулирования Ш. Е. Штейнберг, Л. П. Сережин, И. Е. Залуцкий, И. Г. Варламов /Промышленные контроллеры и АСУ /07,2004.
- http://ovenspb.ru/d/237365/d/rp_plk110.1603.pdf/ Программирование логических контроллеров ОВЕН ПЛК110 и ПЛК160/ Руководство пользователя.
- Матричный метод расчетов динамических рекуррентных искусственных нейронных сетей Сабанин В. Р., Дементьев Д. А., Казьмирук И. Ю., Репин А. И./ Молодой ученый 2018г. 13 выпуск, часть 1. С. 1–9
- Андрюшин А. В., Сабанин В. Р., Смирнов Н. И./ Управление и инноватика в энергетике. Издательский Дом МЭИ 2011, 399.
- Некоторые результаты использования искусственных нейронных сетей в качестве регулятора автоматической системы регулирования // Сабанин В. Р., Дементьев Д. А., Казьмирук И. Ю./ Сборник трудов 26-й международной научно-технической конференции «Современные технологии в задачах управления, автоматики и обработки информации» г. Алушта, Крым, Россия 14–20 сентября 2017 г. С. 60–61.
- https://ru.wikipedia.org/wiki/ Метод обратного распространения ошибки.

