




С появлением одноплатных компьютеров на базе ARM архитектуры многие задачи стали переносить на них, для того чтобы снять излишнюю нагрузку с основных вычислительных систем. Эти нововведение не обошли стороной и машиностроение. Различные подсистемы станков ЧПУ выносятся на сторонние устройства по типу одноплатных компьютеров и микроконтроллеров. Для бюджетного сегмента рынка это оказалось очень удобным решением, которое значительно сокращает затраты времени и финансов.
Достаточно большой проблемой является подключение новых протоколов управления к системе ЧПУ, так если говорить о протоколе CAN, то для того чтобы настроить его работу совместно с системой ЧПУ необходимо произвести значительные изменения в работе ядра системы ЧПУ и произвести множество тестирований. Если создать универсальный модуль управления приводами, то задача соединения его с системой ЧПУ будет сводиться к небольшой настройке ядра системы.
Основные преимущества использования одноплатного компьютера:
‒ Снижение затрат на разработку и доработку ПО;
‒ Открытость архитектуры;
‒ Создание универсального решения;
‒ Снижения нагрузки на ядро системы ЧПУ;
‒ Ценовая составляющая, одноплатные компьютеры на данный момент являются очень бюджетным решением.
Всё вышеперечисленные преимущества говорят о том, что использование одноплатного компьютера является наиболее приемлемым решением, для малых и средних производств, так как иногда невозможно позволить себе дорогое решение, но потребность в решении задач управления остается весьма актуальной.
В качестве одноплатного компьютера для тестирования был выбран одноплатный компьютер Raspberry Pi 3, так как в своей ценовой категории он является лучшим устройствам по показателю цены/качества.
Для обеспечения связи между устройствами(приводами) необходимо выбрать адаптер, в нашем эксперименте это будет mcp2515. В связи с тем что на устройство необходимо подавать сигнал 5В, а передача данных между одноплатным компьютером и адаптером при помощи сигналов 3,3В, то трансивер необходимо модернизировать так, как показано на рисунке 2.
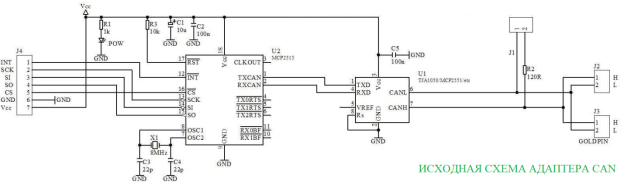
Рис. 1. Исходная схема адаптера CAN
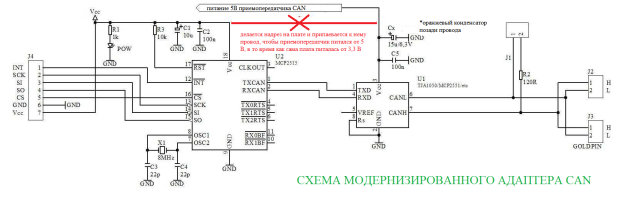
Рис. 2. Модернизированная схема адаптера CAN
Также на рисунке 3 представлена схема подключения одноплатного компьютера и адаптера CAN, передача сигнала осуществляется с частотой 3,3В.
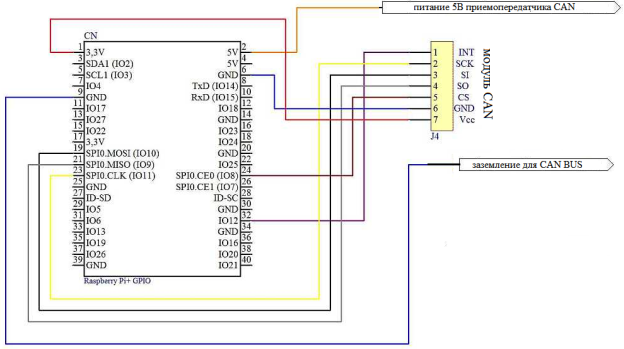
Рис. 3. Схема подключения одноплатного компьютера и адаптера CAN
Исследованы особенности управления приводами и решения задачи управления по средствам использования адаптера управления приводами MCP2515 при помощи одноплатного компьютера Raspberry Pi3. Была представлена структура управления приводами при помощи использования одноплатного компьютера Raspberry Pi3 с целью увеличения производительности на предприятиях малосерийного производства осуществляющих работу на станках с приводами управляемыми по протоколу CAN и увеличение функциональных возможностей оборудования целом.
Целью исследования является разработка модуля управления шаговыми двигателями по протоколу CAN, для создания оптимального решения, которое позволит модернизировать процесс управления приводами в целях повышения производительной продуктивности малосерийных производств. Разрабатываемое решение представляет собой реализацию управления станком с приводами по средствам использования адаптера MCP2515 и одноплатного компьютера Raspberry Pi3 для получения возможности дополнительного конфигурирования системы и снижению затрат. Открытая модульная масштабируемая архитектура системы предоставляет возможность конечным пользователям расширять функциональные возможности при помощи интеграции программно-аппаратных решений. Реализация управления приводами по протоколу CAN при помощи MCP2515 при помощи одноплатного компьютера Raspberry Pi3 позволит создать упрощенное решение для малосерийных производств. На рисунке 4 и 5 соответственно представлены алгоритм работы и структурная схема работы модуля.
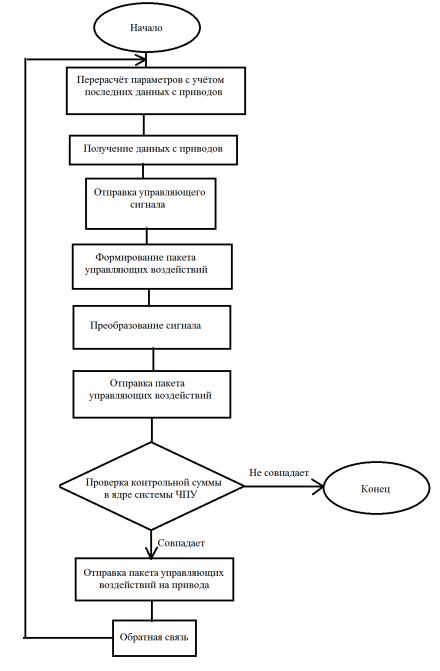
Рис. 4. Алгоритм работы модуля управления
На структурной схеме (рисунок 5) в качестве системы ЧПУ представлена система ЧПУ АксиОМА Контрол, разрабатываемая в МГТУ «Станкин» на кафедре КСУ.
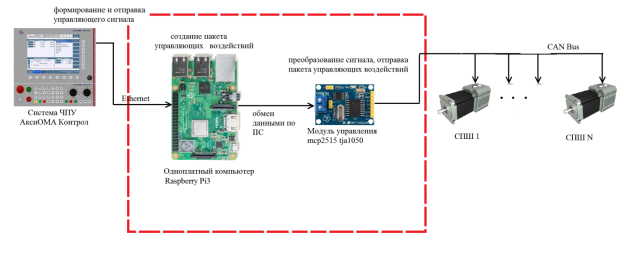
Рис. 5. Структурная схема
Литература:
- Мартинов Г. М. Формирование базовой вычислительной платформы ЧПУ для построения специализированных систем управления / Г. М. Мартинов, Л. И. Мартинова // Вестник МГТУ «Станкин». — 2014. — № 1(24). — C. 82–86.
- ЧПУ «АксиОМАКонтрол» [Электронный ресурс] // Интернет-ресурс кафедры «Компьютерные системы управления» МГТУ «СТАНКИН». URL: http://www.ncsystems.ru/index.php/ru/chpu-aksioma-kontrol (дата обращения: 01.05.2018).
