




В статье рассматривается общее представление о функционировании склада стеллажного типа с автоматизированной подъемной установки с частотным преобразователем для векторного управления асинхронными электродвигателями и программируемым логическим контроллером для технологических и коммуникационных задач.
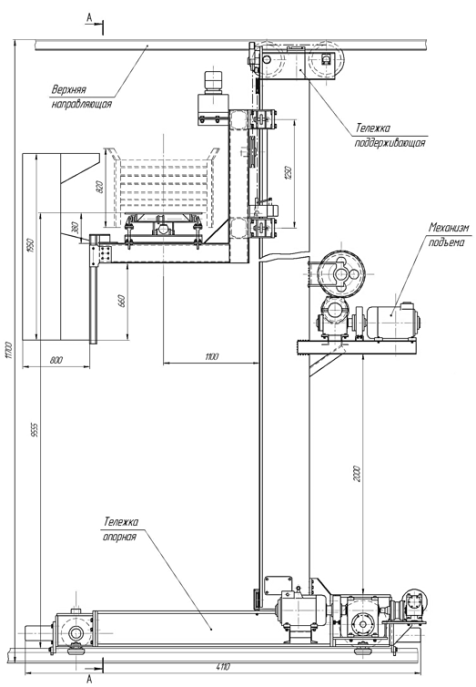
Рис. 1. Вид сбоку стеллажной подъемной установки
Целью работы является автоматизация технологического процесса транспортировки готовой продукции в складское помещение стеллажного типа на основе автоматизированной подъемной установки с многофункциональным электроприводом и программируемым логическим контроллером (ПЛК).
В настоящее время широко автоматизируются технологии управлением складских помещений с использованием новых автоматизированных установок различных видов склада, одним из которых является склад стеллажного типа. Разработка теоретических основ, алгоритмов и моделей складского помещения, являющихся основой для их автоматизации и создания единой системы управления, является актуальной.
Для создания системы такого типа предлагается использовать подъемную установку с частотным преобразователем производства фирмы Control Techniques для векторного управления асинхронными электродвигателями и программируемый логический контроллер фирмы SIEMENS для технологических и коммуникационных задач. Для того чтобы обеспечить автоматизацию управления всем вспомогательным производством необходимо иметь пункт сбора и обработки информации, т. е. необходимо иметь место, в которое, в конечном счете, будет приходить вся информация о каждом товаре в стеллаже, наличие свободных мест и т. д. Это обеспечивает контроллер управления складом SIMATIC S7–200.
Вся информация о ходе технологического процесса и состоянии оборудования передается контроллеру. То есть контроллер в режиме реального времени получает информацию о состоянии системы. Сенсорная панель мониторинга SIMATIC, которая подключен напрямую к контроллеру, дает возможность наблюдать все процессы на мониторе. Таким образом, оператор может наблюдать за ходом всего технологического процесса и влиять на некоторые его параметры.
Особенность системы состоит еще в том, что она может реализовывать режим автоматического управления производством. В этом режиме система управляет стеллажной подъемной установкой с асинхронными электродвигателями, с помощью частотного преобразователя и программируемого логического контроллера без какого-либо вмешательства операторов.
Алгоритм управления подъемной установкой.
Загрузка установки осуществляется следующим образом. После упаковки продукции с электронной меткой в контейнер и подачи ее на платформу загрузки, контейнер пересекает световой барьер и тем самым активирует пускатель для двигателя конвейера загрузки. Контейнер двигается на место «захвата» стеллажной установкой до тех пор, пока не сработает снова световой барьер и пускатель не остановит конвейер. Когда подъемная установка будет находится в исходном месте и в бездействии, при наличии груза на месте «захвата» сработает пускатель загрузки конвейера, контейнер погрузится на грузозахват подъемной платформы. После захвата установкой контейнера с продукцией производится запрос на загрузку контейнера в стеллаж. Задание адреса является сигналом для перемещения подъемной установки по направляющей рельсе. Далее, происходит позиционирование установки по длине стеллажа после чего подъемная платформа с грузом подымается на нужную высоту и снова позиционируется по высоте стеллажа. В работу вступает телескопический стол, который загружает/разгружает контейнер с продукцией. Склад вновь оказывается в исходном состоянии. После этого стеллажная установка остановится и склад готов к повторению всего цикла при поступлении запроса на загрузку или разгрузку. Адреса ячеек в которую загружается/разгружается контейнер заносится в базу данных.
Если имеется запрос на отгрузку и не занят погрузкой, то происходит его включение для доставки требуемого контейнера к месту разгрузки. Для сокращения времени и пути движения подъемной установки целесообразно предварительно произвести анализ положения установки и в зависимости от его результатов выбрать направление последующего движения, это позволяет осуществить благодаря контроллеру управления складской подъемной установки который в реальном времени отслеживает положение установки и определяет последующие движения. Если имеется запрос на отгрузку во время загрузки стеллажа, то установка после отгрузки начнет выполнять операцию разгрузки.
После подхода к зоне разгрузки происходит выгрузка контейнера на конвейер и пуск конвейера.
Таким образом, после завершения всех циклов погрузки/отгрузки стеллажная подъемная установка окажется установленной в исходном положении.
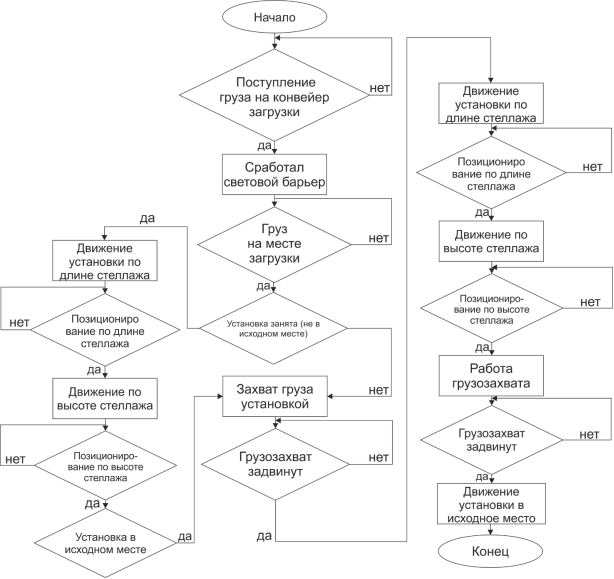
Рис. 2. Алгоритм управления подъемной установкой
Литература:
- Маликов О. Б. Проектирование и автоматизация складов штучных грузов. Л.: Машиностроение, 1989.
- Маликов О. Б. Склады гибких автоматизированных производств. Л.: Машиностроение, 1986. 187 с.
- Смехов А. А. Автоматизированные склады. 3-е изд., М.: Машиностроение, 1979. — 288 с.
