





За последние годы широкое распространение как в военной, так и гражданской сферах получили беспилотные летательные аппараты. Отличительной чертой этого вида авиационной техники является отсутствие человека (экипажа) на борту. Беспилотные самолёты, вертолёты, конвертопланы, коптеры способны длительное время находиться в воздухе, совершать полёты на большие расстояния и нести различную полезную нагрузку. Эффективность выполнения поставленных задач зависит от точности позиционирования аппаратов в воздушном пространстве. Для определения местоположения их в полёте применяются GPS/ГЛОНАСС приёмники. В качестве дополнительных или альтернативных спутниковым системам навигации и наведения беспилотников могут служить бортовые системы ориентирования с реализацией методов получения изображений и распознавания объектов в формате 3D.
В статье изложены основные результаты исследований в области системного инжиниринга и проектирования оптико-электронных систем. Проведен анализ инженерных решений, характеристик и возможностей построения систем управления, навигации и наведения летательных аппаратов с лазерными приборными модулями. Предложены состав и схема (алгоритм) функционирования автономной системы ориентирования беспилотного летательного аппарата — бортового модуля, включающего камеру, лазерный сканер, фильтр. Приборы должны работать совместно, синхронно, во взаимодействии с инерциальным измерительным блоком, создавая вокруг летательного аппарата зону просмотра и измерений в формате 3D. В результате могут формироваться характерные контрольные точки и фигуры, определяющие не только точность следования беспилотного летательного аппарата по заданному маршруту, но и параметры объёмных объектов (целей) или препятствий.
Ключевые слова: беспилотный летательный аппарат, автономная система ориентирования, лазерный дальномер, сканер, камера, объект, изображение, схема функционирования, формат 3D.
С середины 1990-х годов благодаря появлению и началу эксплуатации Глобальной навигационной спутниковой системы GPS США стали стремительно развиваться беспилотные летательные аппараты (БЛА). Современные беспилотные машины могут совершать полёты в воздушном пространстве (тропосфере) на высоте до 20 км и выполнять различные задачи [1].
По сообщениям зарубежных и отечественных средств массовой информации, беспилотные комплексы предназначены для ведения воздушной разведки. Летающие роботы могут оказать действенную помощь в случаях обнаружения и ликвидации последствий аварий и техногенных катастроф: проводить съёмку местности, находить пострадавших людей, доставлять им еду и медикаменты, патрулировать маршруты движения транспорта, осуществлять мониторинг зданий и промышленных сооружений, уточнять состояние объектов энергетики, инфраструктуры и коммуникаций.
Сегодня беспилотные машины строятся с использованием разнообразных аэродинамических схем. Особое место в линейке беспилотной техники занимают конвертопланы, а также лёгкие и сверхлёгкие воздушные роботы — коптеры.
В зависимости от применяемой системы управления БЛА подразделяются на три класса: 1) дистанционно пилотируемые (с радиокомандным управлением и по проводам); 2) программно пилотируемые; 3) с комбинированными системами управления. Особенностью аппаратов с дистанционным управлением (1 класса) является участие в процессе полёта человека-оператора, который располагается, как правило, в наземном пункте управления. Программно пилотируемые летательные аппараты (2 класса) — автономные воздушные роботы, способные совершать полёт и решать задачи по заранее составленной программе, без участия в процессе управления человека-оператора.
Подавляющее большинство созданных и эксплуатируемых беспилотных комплексов имеют радиокомандную и комбинированную системы управления. Для определения местоположения и управления полётом БЛА используются американская система глобального позиционирования GPS, российский аналог — ГЛОНАСС, которые обеспечивают высокую радионавигационную точность. Отклонения позиционирования аппаратов в полёте не превышают 10 метров [2]. Однако существуют зоны и места, в которых из-за искусственных и естественных помех сигналы GPS/ГЛОНАСС недоступны или имеют низкое качество приёма, например, в городах с высотными застройками и источниками (полями) сильного электромагнитного излучения. Возникает необходимость применения средств и методов управления, навигации, информационно-сигнального обеспечения и наведения летающих роботов, прежде всего малоразмерных и маловысотных БЛА без привязки к спутниковым системам. К одним из таких средств относятся оптико-электронные системы с лазерными приборами и устройствами.
Известно, что для определения классификационных признаков оптико-электронных систем (ОЭС) и приборов, а также технологий пространственных измерений, включая фиксирование и обработку параметров объектов, приняты следующие понятия и аббревиатуры: D (от англ. Dimension) — измерение; 1D — одномерное пространство (одна характеристика — длина); 2D — двумерное пространство (два параметра — длина и ширина); 3D — трёхмерное пространство (три пространственных показателя — длина, ширина и высота). Сканирование, измерение параметров и представление изображений объектов в формате 2D обычно называют плоскостным, а в формате 3D — трёхмерным или многомерным.
Проектирование и построение полностью автономных воздушных роботов, «умных» БЛА различного назначения и класса является одним из приоритетных направлений развития военной и гражданской авиации. Многие производители пытаются создать программно пилотируемые аппараты с искусственным интеллектом. Важную роль при этом играет совершенствование элементной базы оптико-электронных систем, создание и внедрение приборов и технологий сканирования пространства и моделирования изображений в 3D формате. Актуальными становятся проблемы обоснования характеристик и конструирования аппаратуры и средств, обеспечивающих формирование и реализацию 3D моделей местности, сверхскоростную обработку и передачу информации, получение голографических изображений объектов и выбор оптимальных маршрутов полёта БЛА.
Цель работы — на основе принципов системного инжиниринга и методов проектирования комплексов управления с оптико-электронными приборами определить архитектуру и возможности построения автономной (бортовой) лазерной системы ориентирования беспилотного летательного аппарата и разработать предложения по её составу и схеме функционирования в формате 3D.
Архитектура и эффективность функционирования любой системы управления может характеризоваться обобщёнными и отдельными, наиболее важными показателями (параметрами) процесса управления — замкнутого цикла целенаправленного воздействия органа управления (управляющего объекта) на объект управления (управляемый объект).
Изучение работ, посвящённых проектированию, созданию и оценке эффективности систем управления наземных и воздушных роботизированных комплексов, свидетельствует о том, что главными конструктивными и функциональными компонентами являются радиотехнические, радиолокационные и оптико-электронные системы с аппаратурой обнаружения признаков объектов, получения их изображений и преобразования сигналов в видимом диапазоне длин волн.
Специально разрабатываемые и создаваемые оптические и электронные системы предназначены для оснащения боевых и вспомогательных машин-роботов, навигационных, охранных, поисковых и разведывательных комплексов с БЛА. Они применяются в условиях, когда объём первично поучаемой информации недостаточен, не отвечает требованиям по полноте, точности и достоверности данных и для решения задач управления необходимо проводить сканирование внешней среды, анализ окружающей обстановки, детализацию местности и объектов в режиме реального времени [3].
Принципиальная схема работы ОЭС с фото-, телевизионными, лазерными и другими приборами при выполнении задач поиска, обнаружения объектов и обеспечения управляемого полёта беспилотных летательных аппаратов показана на рис. 1.
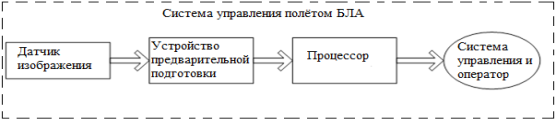
Рис. 1. Принципиальная схема работы ОЭС беспилотных летательных аппаратов
Основное содержание процесса управления летательным аппаратом и функционирования ОЭС заключается в выполнении следующих операций: подготовка к работе; проведение измерений; формирование моделей окружающей среды; обеспечение динамического поиска и обнаружения объектов (целей); кодирование, передача и декодирование информации; фиксирование отдельных точек и фигур c отображением их текущих координат (параметров); предоставление информации в удобном для потребителей виде; идентификация ориентиров и критически опасных объектов в реальном времени [3–5].
Исходя из цели и задач исследования, под управлением беспилотным летательным аппаратом будем понимать общий процесс функционирования системы управления и совершения полёта от начала до конца, а также составляющие его части — композиционные этапы, фазы, периоды, моменты, которые могут рассматриваться и позиционироваться как самостоятельные отдельные процессы.
Под автономной системой ориентирования (АСО) БЛА следует понимать совокупность приборов, устройств, аппаратно-программных средств и каналов связи, предназначенных для определения, преобразования и представления параметров полёта беспилотного аппарата и изображений объектов в формате 3D.
Разработка и создание эффективных и сравнительно недорогих лазерных приборов для применения в специализированных ОЭС является важной научно-технической и прагматической задачей. Её решение обусловливает необходимость выбора лазерных сканеров, аппаратно-программных средств и методов, обеспечивающих получение видеоинформации, обработку данных телеметрии, моделирование и анализ изображений, сравнение и распознавание образов в трёхмерном формате.
В системах управления, навигации и наведения наземных и воздушных роботов используются различные по конструкции и физическим принципам действия приборы: радары, сканеры, дальномеры, лидары, сонары, стереоскопы и др. Сканирующие устройства формируют области точек и сцены в результате активного либо полуактивного просмотра определённого участка местности и регистрации отражённых от объектов сигналов. Стереоскопические приборы запечатлевают видеоинформацию в виде экспозиций (кадров), получаемых с использованием двух фотокамер (видеокамер), которые образуют стереопару.
Анализ характеристик, представленных на мировом рынке оптико-электронных приборов показывает, что в качестве средств для создания 3D моделей окружающего пространства и объектов могут применяться лазерные дальномеры. На сегодняшний день наиболее приемлемыми для использования в составе системы ориентирования БЛА могут считаться приборные модули на базе сканирующих 2D или 3D лазерных дальномеров.
На рис. 2 показан внешний вид лазерных дальномеров-сканеров японского и американского производства: 2D Hokuyo UTM-30LX (Япония) [6], 3D HDL-32e (США) [7].


Hokuyo UTM-30LX (Япония) HDL-32E (США)
Рис. 2. Внешний вид лазерных дальномеров-сканеров
Основные характеристики лазерных приборов Hokuyo UTM-30LX и HDL-32Е приведены в таблице 1.
Таблица 1
Технические характеристики лазерных дальномеров-сканеров
|
Наименование характеристик |
Hokuyo UTM-30LX |
HDL-32Е |
|
Дальность действия, м |
60 |
100 |
|
Точность измерения, см |
± 5 |
± 2 |
|
Вертикальный угол обзора, град. |
25 |
от -10 до +30 |
|
Горизонтальный угол обзора, град. |
270 |
360 |
|
Масса, г |
210 |
1000 |
|
Габариты (длина × ширина × высота), мм |
60×60×87 |
Ø85 × 144 |
|
Скорость сканирования |
25 мс/скан в горизонт. плоскости |
700000 точек в секунду |
|
Количество лазерных лучей |
1 |
32 |
|
Цена (ориентировочная), руб. |
478 500 |
850 000 |
Заметим, что оба лазерных дальномера-сканера могут применяться в составе АСО БЛА. Они позволят сканировать пространство и измерять дальности до объектов в форматах 2D и 3D с достаточной точностью. При реализации характеристик в благоприятных условиях такие лазерные приборы могут позволить получать данные для создания трёхмерных моделей окружающей среды и объектов в процессе полёта БЛА [8].
Лазерный 3D-сканер (HDL-32Е), по сравнению с образцом 2D (UTM-30LX), обладает рядом преимуществ: дальность действия до 100 м, обеспечение кругового обзора, более высокая точность и скорость сканирования. Однако он почти в 5 раза тяжелее и в 1,8 раза дороже, чем 2D-дальномер. Главным ограничением применения таких лазерных приборов в АСО БЛА можно считать небольшую дальность действия, что, по всей вероятности, не позволит в процессе полёта получать видеоизображения объектов необходимого качества и передавать информацию в реальном времени.
Вероятно, что в состав бортового модуля — АСО БЛА — должны входить лазерные сканеры-дальномеры, видеокамеры (стереопара), фильтр (прибор для обработки потоковой информации, оценки состояния БЛА и положения ориентиров). Приборы должны иметь большую дальность действия и эффективно функционировать при совершении полёта БЛА в различных слоях тропосферы. Необходимо учитывать, что в тропосфере сосредоточено около 80 % массы атмосферы, находится почти весь водяной пар, возникают грозы, бури, облака и осадки, а также происходит вертикальное (конвекция) и горизонтальное (ветер) перемещение воздуха. Воздух в тропосфере нагревается от суши и воды, поэтому температура воздуха с высотой понижается в среднем на 0,6°С на каждые 100 метров.
Основу функционирования АСО БЛА будет составлять построение геометрических моделей изображений объектов в формате 3D. Сущность это процесса заключается в накоплении, интегрировании и фильтрации текущих параметров, то есть в увязке и суммировании результатов двумерных измерений в области сканирования с характеристиками разрешающей способности аппаратуры. Процесс формирования изображений эталонных и реальных объектов для ориентирования БЛА в формате 3D можно представить в виде поэтапного выполнения следующих процедур: выбор объекта изображения; измерение параметров в формате 2D (2D-описание); преобразование рассеянного изображения в трёхмерные структуры с фильтрацией параметров (3D-описание); получение трёхмерной геометрической модели изображения.
Этапы и схема преобразования текущих параметров при построении трёхмерной геометрической модели изображения реального объекта в автономной (бортовой) системе ориентирования БЛА показаны на рис. 3.

Рис. 3. Схема формирования 3D-модели изображения объекта в АСО БЛА
Начальное входное изображение может представлять собой одиночный чёрно-белый или цветной отпечаток, снимок, кадр. Экспозиция объекта создаётся выделением, наложением или совмещением изображений, получаемых приборами стереопары АСО БЛА. Примерами двумерных элементов, выделяемых в исходных изображениях, могут служить плоскостные границы объектов, контурные точки, линии конфигураций, зоны равномерной яркостной интенсивности. К трёхмерным структурам могут относиться двумерные элементы с добавлением к описанию их форм и измерений третьего параметра — вершины, возвышения, выпуклости объектов на земной поверхности, высоты зданий, сооружений и т. п. По результатам обработки данных в вычислительно-фильтрующем блоке АСО БЛА производится преобразование рассеянного изображения, формирование сцены и конфигурации объектов, сравнение изображений (экспозиций) эталонного и реального объектов. Для анализа изображений и построения геометрической модели из набора трёхмерных структурных компонентов могут применяться методы описания границ, поверхностей, объёмов [5].
Сущность работы оптико-электронных средств и технологии получения сигналов управления для навигации, ориентирования и наведения БЛА заключается в сканировании окружающего пространства и сопоставлении текущего и эталонного изображений с локализацией и сенсоризацией контурных точек заданных объектов. В АСО это предполагает периодическое или с заданной частотой включение лазерных дальномеров-сканеров, определение параметров полёта аппарата (телеметрии) и текущих координат сканируемых объектов. По их значениям формируются сигналы управления летательным аппаратом. В данном процессе используются априорная информация для построения эталонного изображения и апостериорная информация, представляющая собой параметры изображения на выходе АСО. Потоковая информация от фильтра и инерциальной навигационной системы поступает в канал датчика изображений, систему автосопровождения и блок выработки сигналов-команд управления.
Основные блоки и принципиальная схема функционирования системы управления БЛА с включением в её состав АСО показаны на рис. 4.
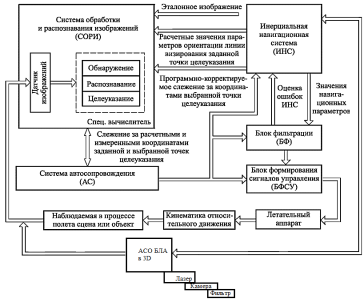
Рис. 4. Состав и структурно-функциональная схема управления полётом БЛА с автономной системой ориентирования в формате 3D
Измерения параметров в ходе полёта БЛА и определение дальностей до объектов с помощью лазерных дальномеров-сканеров должны проводиться многократно, периодически или эпизодически. Аппроксимация их значений в вычислительном блоке может осуществляться по методу Ramer-Douglas-Peucker. Обработка величин, распределённых по ломаной линии, предусматривает их аппроксимацию и построение прямой линии с меньшим числом фиксированных точек. Это позволяет строить и рассматривать области точек и объёмные фигуры с измерениями по прямым отрезкам [9, 10].
Обработка данных и получение изображений объектов при функционировании АСО БЛА может выполняться методом сравнения экспозиций (кадров) с использованием библиотеки алгоритмов компьютерного зрения OpenCV. Алгоритм из этой библиотеки позволяет строить карту глубины по двум изображениям стереопары [11].
Определение текущих координат БЛА и наблюдаемых объектов может проводиться по результатам обработки информации, поступающей от бортового 3D-лазерного сканера и малогабаритных трёхосных акселерометра и гироскопа. Заметим, что измерение и получение абсолютных значений углов наклона и крена БЛА возможно с помощью акселерометра. Бортовой гироскоп может выдавать значения углов наклона, крена и курса с некоторой погрешностью из-за ухода «нуля» и ошибки интегрирования угловых скоростей.
При измеренных углах наклона и крена БЛА создаваемые 3D-лазерным сканером точки изображений позволяют определять высоту полёта, а последовательности изображений — приращения долготы, широты (или линейных координат Δx, Δy) и курсового угла (Δφ). Величины для уточнения параметров полёта БЛА в формате 3D могут определяться методами экстремальной навигации. При обработке данных от сканирующих лазерных приборов и расчётах параметров относительно объекта наблюдения необходимо учитывать, что рассогласование измерений дальности может находиться в пределах 3–5 см. Следовательно, ошибка вычисления приращения координат в одном цикле измерений может составлять не более 0,5 см по линейным координатам и не более 0,2 градусов по курсу. Пороговые значения ошибок измерений приведены на графиках рис. 5 [11, 12].
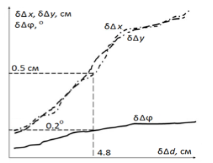
Рис. 5. Распределение ошибок вычисления приращений координат в зависимости от точности измерения дальности
Таким образом, проектирование и научно-техническое обоснование бортовых систем управления и устройств БЛА должны включать: определение приборов и структуры оптико-электронных систем, описание схем, процессов и особенностей их функционирования при полёте в тропосфере, разработку расчётно-аналитических моделей и алгоритмов построения изображений объектов в формате 3D.
В состав автономной системы ориентирования БЛА могут входить: лазерный дальномер-сканер, камера, фильтр-процессор. Они должны обеспечивать получение и преобразование параметров полёта, обработку данных трёхмерных измерений и построение моделей изображений эталонного и реального объектов. Основными условиями и факторами работы приборов и моделирования изображений в формате 3D являются синхронизация, быстродействие и точность измерений, то есть определение и учёт параметров рассогласования и величин ошибок, которые могут накапливаться в ходе полёта БЛА. Возможно, что для устранения погрешностей измерений и достижения требуемых точностей работы системы ориентирования в формате 3D перед применением каждого летательного аппарата необходимо будет проводить калибровку лазерных приборов и настройку оптико-электронных устройств.
Литература:
- Исламов В. К. История создания и применения БЛА / Труды I-й Военно-научной конференции «Роботизация ВС РФ» — М.: ФГБУ ГНИИЦ РТ МО РФ, 2016. — 470 с.: ил. — С. 118–130.
- Управление и наведение беспилотных манёвренных летательных аппаратов на основе современных информационных технологий / Учеб. пособие. Под ред. М. Н. Красильщикова и Г. Г. Себрякова. — М.: ФИЗМАТЛИТ, 2003. — 280 с.
- Техническое зрение в системах управления мобильными объектами. Труды научно-технической конференции-семинара. Вып. 4 / Под ред. Р. Р. Назирова. — М.: КДУ, 2011. — 328 с.
- Юревич Е. И. Сенсорные системы в робототехнике / Учеб. пособие. СПб.: Изд-во Политехнического университета, 2013. — 100 с.
- Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов / Под. ред. М. Н. Красильщикова, Г. Г. Себрякова. — М.: ФИЗМАТЛИТ, 2009. — 556 с.
- Scanning Rangefinder Distance Data Output/UTM-30LX Product Details // URL: https://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- HDL-32E // URL: http://velodynelidar.com/hdl-32e.htm
- Загоруйко С. Н., Носков В. П. Навигация БЛА и 3D-реконструкция внешней среды по данным бортовой АСО // Мехатроника, автоматизация, управление. 2014. № 8. — С. 62–67.
- U. Ramer. An iterative procedure for the polygonal approximation of plane curves // Computer Vision, Graphics, and Image Processing, 1. 1972. 244–256 s.
- David Douglas, Thomas Peucker. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature // The Canadian Cartographer. № 10(2). 1973. S.112–122.
- Носков В. П., Носков А. В. Навигация мобильных роботов по дальнометрическим изображениям // Мехатроника, автоматизация, управление. 2005, № 12. — С. 16–21.
- Носков В. П., Рубцов И. В. Формирование объединённой модели внешней среды на основе информации видеокамеры и дальномера // Мехатроника, автоматизация, управление. 2007, № 8. — С. 2–5.
