




В статье рассмотрен робототехнический комплекс «ВАРАН», представлены варианты модернизации этого робота для улучшения скорости при работе на разведке и увеличения маневренности, путём замены гусеничной платформы.
Ключевые слова: мобильный робототехнический комплекс
The article was reviewed robotic complex «VARAN», presented options for upgrading the robot to improve the speed when working on exploration and increase maneuverability by replacing the tracked platform.
Keywords: the mobile robotic system
Для дистанционного проведения визуальной разведки, поиска и первичного диагностирования подозрительных на взрывное устройство (ВУ) предметов с помощью телевизионных камер и специального навесного оборудования, дистанционного обезвреживания ВУ, загрузка ВУ в специальные контейнеры для эвакуации, а также выполнения работ при продвижении по различным дорогам технологических операций по обеспечению доступа к потенциально опасным объектам лучше всего подходит мобильный робототехнический комплекс «ВАРАН». На сегодняшний день, для обезвреживания взрывчатых устройств, без робототехнических комплексов не обойтись. Цель нашей работы — улучшить конструкцию робота (рис.1) и повысить маневренность данной модели на соответствующем участке его работы.

Рис. 1. Мобильный робототехнический комплекс «ВАРАН»
|
Характеристики, используемые для модернизации робототехнического комплекса. |
||
|
Габариты (ДШВ) |
1,2х0,7х0,7м |
|
|
Масса |
185 кг |
|
|
Время работы |
4 часа |
|
|
Радиус действия: |
||
|
-по радио |
1000 м |
|
|
Число степеней подвижности манипулятора |
5 |
|
|
Диапазон регулирования скорости |
0–0,5 м/с |
|
|
Угол поворота манипулятора относительно вертикальной оси |
360 град |
|
|
Питание МР от двух батарей |
12 В |
|
Для достижения цели, мы решили, заменить тяжелую гусеничную платформу, которая используется на «ВАРАНе» на колесную платформу (рис.2)

Рис. 2. Колесная платформа для «ВАРАН»
В приоритете главным показателем является скорость.
‒ Максимальная VГус=0,5 м/с = 1,8 км/ч.
‒ Максимальная VКол=5 м/с= 18 км/ч
При использовании колесной платформы конструкция станет более легкой и маневренной. За счет снижения веса робота, он станет более мобильным. Положительным результатом также станет уменьшение потребляемой энергии. После всех модернизаций работоспособное состояние, при котором значение всех параметров, характеризующих способность выполнять заданные функции, соответствует требованиям нормативно-технической документации.
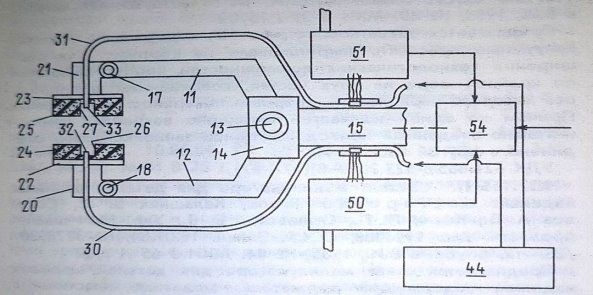
Рис.3. Схват манипулятора с датчиками прижима
Также усовершенствуется схват манипулятора, путем добавления датчиков прижима. Он содержит рычаги 11 (рис.3) и 12, поворачиваемые вокруг оси 13 механизмом 14 обычного типа, связанным с главной приводной системой через полный рычаг 15. На концах рычагов 11 и 12 устанавливаются пальцы 20 и 21, которые могут свободно поворачиваться вокруг осей 17 и 18. На концах пальцев устанавливаются пластины 22 и 23, которым крепятся эластичные подушки 24 и 25. В середине подушек имеются выемки 26 и 27, куда вводится трубки 30 и 31. В трубки подается сжатый воздух из источника 44, который выходит из отверстий 32 и 33 трубок. При соприкосновении подушек с зажимаемым объектом вместо выемок 26 и 27 образуются замкнутые полости, препятствующие выходу воздуха, в результате чего давление воздуха повышается, что определяется датчиками 50 и 51, связанными с блоком 54, управляющим перемещением механизма 14.
Модернизация облегчила конструкцию и улучшила ее характеристики, что представлено на рис.4.


Габариты (ДШВ) 1,2х0,8х0,9м Габариты (ДШВ) 1,2х0,7х0,7м
Масса 85 кг Масса 185 кг
Время работы 6 часов Время работы 4 часа
Диапазон регулирования Диапазон регулирования
Скорости 0–5 м/с Скорости 0–0,5 м/с
Рис.4. Сравнение модернизированного мобильного робототехнического комплекса «ВАРАН» и более ранней модели
Результатом проведенных работ является:
1) Высокая работоспособность в городских условиях
2) Уменьшение веса робота
3) Увеличение времени работы
4) Уменьшение расхода электрической энергии
5) Улучшение маневренности
Литература:
- Концепции развития робототехники / Е. В. Поезжаева // Концепции развития робототехники: учебное пособие / М-во образования и науки Рос. Федерации, Перм. нац. исслед. политехн. ун-т. — Пермь: Изд-во ПНИПУ, 2017. — 437 с. Допущено УМО вузов по образованию в обл. автоматизированного машиностроения (УМО АМ) в качестве учеб. пособия.
- Https://3dnews.ru/563129
- Https://robotsspace.ucoz.ru/news/2008–07–23–172
- Поезжаева Е. В. Промышленные роботы: учеб. пособие: в 3 ч.– Пермь: Изд-во Перм. гос. техн. ун-та. –Ч.1. — 2006; Ч.2, Ч.3. — 2009.
