





К настоящему времени, в практике зарубежного грузового вагоностроения, широкое применение получили различные варианты конструкции упругих боковых опор кузова непрерывного контакта. Применение данного типа опор в конструкции отечественных грузовых вагонов связано с рядом трудностей, объясняемых различиями в конструкции ходовых частей [1]. В связи с чем, актуальной является задача определения рациональных параметров упругих боковых опор непрерывного контакта, с учетом особенностей конструкции, содержания и эксплуатации отечественных грузовых вагонов.
Современное развитие вычислительной техники и средств имитационного моделирования позволяет решать подобные задачи на основе численных экспериментов с применением математических моделях. Разработка модели грузового вагона, оборудованного упругими боковыми опорами постоянного контакта, производилась в среде программного комплекса численного интегрирования уравнений движения «Универсальный механизм».
Разработанная модель грузового вагона состоит из 23 абсолютно твердых тел (кузов, две надрессорные балки, четыре боковые рамы, восемь фрикционных клиньев, четыре колпака боковых опор, четыре колесные пары), для каждого из которых задана масса mi и элементы тензора инерции Ji , где i – номер тела.
Задание моментов инерции производилось относительно осей собственной системы координат тела (СКi) {Сi, xi, yi, zi}, начало которой совпадает с центром масс тела (рис. 1). Для описания положения и количества степеней свободы тел системы введены две общие системы координат: базовая неподвижная (СК00) {С0, X0, Y0, Z0} и базовая подвижная (путевая) (СК0) {0, x , h, z}.
Движение экипажа в целом и его составных тел представляется как сложное, состоящее из переносного (вместе с путевой системой координат) и относительного (относительно базовой подвижной (путевой) системы координат) движений. Начало подвижной базовой (путевой) системы координат поступательно движется вдоль оси пути со скоростью движения экипажа.
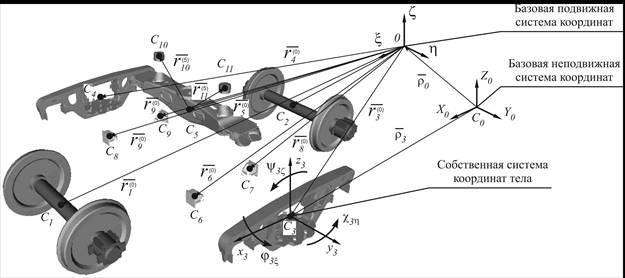
Рис. 1. Задание систем координат в модели тележки
Положение i-го тела в СК0, может быть определено положением вектора ri(0) (здесь и в дальнейшем, нижний индекс обозначает систему координат или номер тела, для которых вычисляется величина, а верхний индекс показывает в какой системе координат производится вычисление) соединяющего начала СК0 и СКi, а также углами между осями СК0 и СКi. Эти величины могут быть представлены в виде тензора проекций вектора ri(0) на оси СК0 (Ri(0)) и матрицы поворота (направляющих косинусов) (Аi(0)), имеющих размерность 3х3.
Величины углов между осями систем координат могут быть найдены через преобразование, заключающееся в выполнении трех элементарных поворотов в определенной последовательности, посредством которых оси СКi становятся параллельны осям СК0. Углы элементарных поворотов называются углами ориентации [4]. Алгоритм вычисления углов поворота определяется последовательностью осуществления элементарных поворотов. При этом для каждого варианта такой последовательности существуют вырожденные положения, в которых не могут быть однозначно определены численные значения углов ориентации. Во избежание подобной ситуации в процессе моделирования, использовалась последовательность углов ориентации Крылова (Кардано), для которых вырождение наступает при значении углов ориентации + p/2 [2].
Для однозначного определения положения тела, имеющего шесть степеней свободы, в системе координат СК0 достаточно шести обобщенных координат, которые могут быть объединены в вектор положения размерности 6х1. Для боковой рамы (рис.1) такой вектор будет иметь вид:
 (1)
(1)
где r3x(0), r3h(0), r3z(0) – проекции вектора описывающего положение начала СК3 в СК0 на координатные оси СК0;
 – углы между координатными осями СК3 и СК0 (x3 Ù x, y3 Ù h, z3 Ù z соответственно).
– углы между координатными осями СК3 и СК0 (x3 Ù x, y3 Ù h, z3 Ù z соответственно).
На рис. 1 углы поворота СК3 показаны условно, т.к. в положении изображенном на рисунке оси СК3 иСК0 параллельны.
Через обобщенные координаты могут быть выражены линейные и угловые скорости и ускорения любого тела. Применительно к боковой раме (рис.1), в соответствии с методикой [2], эти выражения, в матричной форме, имеют вид:
 ,
,  (2)
(2)
 ,
,  (3)
(3)
где v3(0), a3(0) – линейные скорости ускорения боковой рамы относительно СК0;
w3(0), e3(0) – угловые скорости ускорения боковой рамы относительно СК0;
U3(0) – матрица Якоби  ;
;
B3(0) – матрица Якоби  .
.
С применением той же методики, могут быть получены уравнения для определения линейных и угловых перемещений, скоростей и ускорений любых точек, принадлежащих рассматриваемому телу в модели вагона.
Рассмотренное математическое описание расчета кинематических характеристик тел системы реализовано в комплексе «Универсальный механизм» в виде программной процедуры задания шарнира, соединяющего рассматриваемое тело с базовой системой координат. На предварительном этапе, задана параллельная осям СК0 пространственная ориентация собственной системы координат каждого тела, входящего в модель грузового вагона. В процессе описания шарниров для каждого тела задан вектор ri(0) в начальном положении (при t = 0) и выбран тип углов ориентации.
Для описания силовых взаимодействий, грузовой вагон, оборудованный боковыми опорами кузова непрерывного контакта, представлен в виде структурного графа, отражающего силовые связи тел, входящих в систему (рис. 2). Силовые связи включают: контактные взаимодействия между телами, упругие (пружины центрального рессорного подвешивания) и упруго-диссипативные (упругие элементы боковых опор) силы.
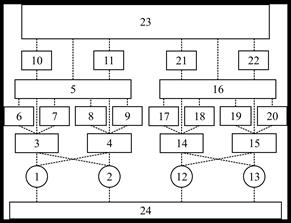
Рис. 2. Структурный граф грузового вагона, отражающий силовые связи входящих в систему тел:
1, 2, 12, 13 – колесные пары; 3, 4, 14, 15 – боковые рамы; 5, 16 – надрессорные балки, 6 - 9, 17 - 20 – фрикционные клинья; 10, 11, 21, 22 – колпаки боковых опор, 23 – кузов, 24 – путь
Для описания контактных взаимодействий применялась, реализованная в виде программной процедуры, математическая модель контакта типа «точка-плоскость» [3], представляющая собой связь одностороннего неудерживающего типа. В случае появления контакта, контактная сила раскладывается на две: нормальную и силу трения. Для вычисления нормальной реакции использована упруго-диссипативная модель, а для вычисления силы трения вводятся два режима: скольжение и упругое сцепление, тем самым обеспечивается непрерывность силовой характеристики и процессов. На основе модели «точка – плоскость» описаны контактные взаимодействия в следующих парах тел (рис.2): боковая рама – корпус буксы колесной пары; фрикционный клин – боковая рама; фрикционный клин – надрессорная балка; пятник кузова – подпятник надрессорной балки; боковой скользун кузова – колпак боковой опоры; колпак боковой опоры – корпус боковой опоры [4].
Для описания упругих и упруго-диссипативных силовых связей применялась, реализованная в «Универсальном механизме» в виде программной процедуры, математическая модель обобщенного линейного силового элемента [7]. Рессорный комплект грузового вагона представлен в виде трех безинерционных линейных упругих элементов. Два упругих элемента представляют собой двухрядные подклиновые пружины, а третий элемент описывает пять основных двухрядных пружин. Рассмотрим задание линейного упругого элемента моделирующего пять основных пружин рессорного комплекта (рис.3).
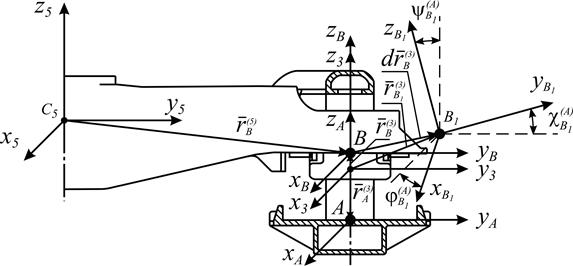
Рис. 3. Схема определения деформации упругого элемента рессорного подвешивания тележки
Упругий элемент соединяет боковую раму и надрессорную балку тележки. Положение точек прикрепления упругого элемента (А, В) заданы в собственных системах координат боковой рамы (вектором rA(3)) и надрессорной балки (вектором rВ(5)). С точками А и В связываются локальные системы координат СКА и СКВ, оси которых параллельны осям системы координат тел с которыми они связаны. Заданные для момента времени t = 0 положения точек А и В соответствуют недеформированному состоянию упругого элемента. В процессе движения взаимное положение тел изменяется. При этом точка прикрепления элемента к надрессорной балке перемещается из положения В в положение В1 (положение точки В1 на рис. 3 принято условно, для большей наглядности при изображении векторов перемещений). Положение точки В1 в СКВ может быть записано следующим векторным уравнением:
 (4)
(4)
Из уравнения (4) очевидно, что величина линейной деформации упругого элемента определяется вектором  . С учетом этого деформация упругого элемента может быть описана при помощи матрицы линейной деформации (dR) и матрицы угловой деформации (Аi(i)), вычисление которых производится по аналогии с методикой определения перемещения тел, описанной выше.
. С учетом этого деформация упругого элемента может быть описана при помощи матрицы линейной деформации (dR) и матрицы угловой деформации (Аi(i)), вычисление которых производится по аналогии с методикой определения перемещения тел, описанной выше.
Математическая модель силы F и момента M в системе координат упругого элемента, действующих на надрессорную балку и приведенных к точке B1, определяются следующим выражением в матричной форме, в соответствии с методикой, изложенной в [2]:
 (5)
(5)
 (6)
(6)
где Сr – матрица линейной жесткости;
Cj – матрица угловой жесткости.
Для моделирования упруго-диссипативного элемента боковой опоры применена реологическая модель Кельвина. Данный элемент соединяет колпак боковой опоры с надрессорной балкой. Методика добавления к модели элемента данного типа аналогична рассмотренному выше упругому элементу. В соответствии с методикой [2], математическая модель силы FD и момента MD упруго-диссипативного элемента определяются следующими выражениями в матричной форме:
 (7)
(7)
 (8)
(8)
где Dr – матрица линейной диссипации;
Dj – матрица угловой диссипации.
В случае необходимости модель упруго-диссипативного элемента может быть трансформирована в чисто упругую модель, если в уравнениях (7,8) матрицы линейной и угловой диссипации рассматривать как нулевые.
В процессе описания кинематических и силовых связей произведена параметризация модели с помощью записи соответствующих величин через идентификаторы, что позволяет производить многовариантные расчеты и вносить в модель изменения, без необходимости ее полной переработки.
Расчет кинематических и силовых параметров производится на основании интегрирования дифференциальных уравнений движения. Вопросам синтеза уравнений движения системы абсолютно твердых тел с идеальными голономными связями посвящены работы [2,5,6]. В соответствии с методикой [5], полученные на основании теоремы о движении центра масс, динамических уравнений Эйлера и общего уравнения динамики, дифференциальные уравнения, описывающие движение боковой рамы (рис.1), в матричной форме, имеют вид:
 (9)
(9)
где m3 – масса боковой рамы, кг;
Ji(i) – тензор инерции боковой рамы относительно осей СК3;
 – главный вектор и главный момент, относительно центра масс, активных сил;
– главный вектор и главный момент, относительно центра масс, активных сил;
 – главный вектор и главный момент, относительно центра масс, сил реакций связей;
– главный вектор и главный момент, относительно центра масс, сил реакций связей;
 – векторы перемещения центра масс и поворота боковой рамы при возможном перемещении системы;
– векторы перемещения центра масс и поворота боковой рамы при возможном перемещении системы;
 – кососимметрическая матрица, имеющая вид [5]:
– кососимметрическая матрица, имеющая вид [5]:
 (10)
(10)
Последнее уравнение в (9) представляет собой уравнение связи, запись которого основана на условии идеальности связей в разработанной модели грузового вагона. С применением уравнений связи, система дифференциальных уравнений описывающих движение разработанной модели грузового вагона, как механической системы, в общем виде может быть записана [7]:
 (11)
(11)
где М(q) – матрица масс;
 – вектор-столбец обобщенных сил инерции;
– вектор-столбец обобщенных сил инерции;
Q – вектор-столбец обобщенных активных сил.
В соответствии с методикой, изложенной в [5], матрицы входящие в уравнение (11), применительно к разработанной модели грузового вагона имеют вид:
 (12)
(12)
 (13)
(13)
 (14)
(14)
На основании проведенного описания силовых и кинематических связей, программным комплексом «Универсальный механизм» синтезируются уравнения движения в символьной форме в соответствии с уравнениями (11-14). В процессе решения уравнений, относительно обобщенных координат, возможно определение перемещений, скоростей и ускорений любых точек, принадлежащих телам системы, а также расчет усилий возникающих в силовых связях системы.
Для верификации модели произведен аналитический расчет статических нагрузок действующих на подпятники и боковые опоры, а также статической деформации рессорных комплектов для вагонов с массой брутто 23,5 тс и 94 тс (порожний и груженый режим соответственно). Эти же величины были определены по результатам моделирования движения вагона с постоянной скоростью по прямому горизонтальному участку пути, не имеющему неровностей, при аналогичных режимах загрузки. Данный режим движения, согласно первому закону Ньютона, является эквивалентным статическому положению системы. Сравнение результатов полученных аналитическим путем и в результате моделирования, показало наличие различий не более чем 2% в величинах сравниваемых параметров, что говорит о достаточной степени достоверности полученной модели грузового вагона.
Литература:
1. Морчиладзе И. Г., Соколов М. М., Додонов А. В. Сравнение конструктивных схем отечественной и зарубежной тележек для грузовых вагонов // Вестник ВНИИЖТ. 2004, № 8. С. 48 - 52.
2. Погорелов Д.Ю. Введение в моделирование динамики систем тел: Учеб. пособие. – Брянск: БГТУ, 1997. – 156 с.
3. Погорелов Д.Ю., Павлюков А.Э., Юдакова Т.А., Котов С.В. Моделирование контактных взаимодействий в задачах динамики систем тел. [Текст]// Динамика, прочность и надежность транспортных машин. – Брянск: БГТУ, 2001. – С. 11–23.
4. Давыдов А.Н. Моделирование упругой боковой опоры непрерывного контакта кузова грузового вагона [Текст] // Молодые ученые транспорту: Труды научно-технической конференции. – Екатеринбург: Изд-во УрГУПС, 2009. – С.49-55.
5. Михеев Г.В. Компьютерное моделирование динамики систем абсолютно твердых и упругих тел, подверженных малым деформациям: дис. … канд. техн. наук / Г.В. Михеев: Брянский государственный технический университет. – Брянск, 2004. – 155 с.
6. Павлюков А.Э. Прогнозирование нагруженности ходовых частей грузовых вагонов повышенной грузоподъёмности методами имитационного моделирования: Автореф. дис. … д-ра. техн. наук. – Екатеринбург, УрГУПС, 2002. – 48 с.
7. Универсальный механизм. Руководство пользователя [Электронный ресурс] / Погорелов Д.Ю. – Электрон. дан. (19 файлов). – Брянск, 2009. – Режим доступа: http://www.umlab.ru/download_rus.htm
