Для лучшего понимания студентами процесса перехода из одной системы координат в другую дадим проекции одного и того же вектора ![]() в двух системах координат a, b, c и α, β (рис. 1).
в двух системах координат a, b, c и α, β (рис. 1).
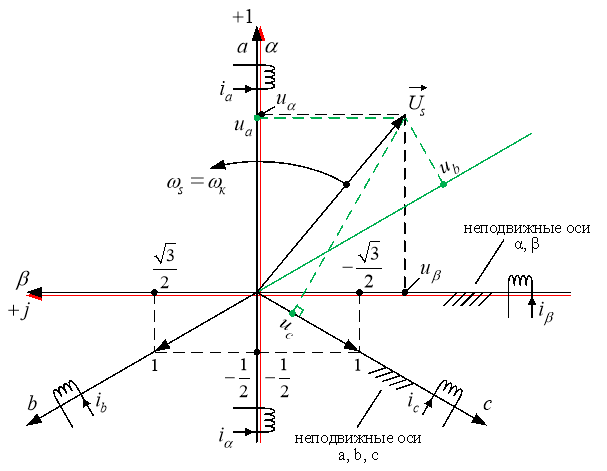
Рис. 1. Проекции вектора ![]() в системах координат a, b, c и α, β
в системах координат a, b, c и α, β
В двухфазной системе координат α, β пространственный вектор ![]() [1]:
[1]:
![]()
В трехфазной системе a, b, c пространственный вектор ![]() определяется по следующей зависимости:
определяется по следующей зависимости:
|
|
(1) |
где ![]() ,
, ![]() и
и ![]() - единичные пространственные векторы, определяемые:
- единичные пространственные векторы, определяемые:
|
|
(2) |
Подставим (2) в уравнение (1):

А) Прямой перевод переменных из трехфазной системы в двухфазную: a, b, c → α, β.
Проекции вектора ![]() по оси (+1):
по оси (+1):
![]()
Проекции ![]() по оси (+j):
по оси (+j):
![]()
Объединим уравнения в систему:
|
|
(3) |
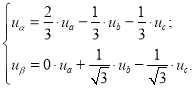
С помощью полученных уравнений производится переход из одной системы координат в другую: a, b, c → α, β.
В матричной форме система уравнений (3) примет следующий вид:
|
|
= |
|
|
|
· |
|
|
|
0 |
|
|
| ||
|
0 |
0 |
0 |
0 |
|
Математическая модель прямого преобразования координат (ua, ub, uc → uα, uβ) в Simulink представлена на рис. 2.
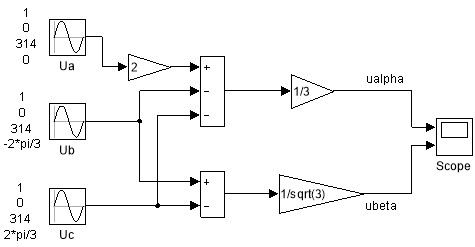
Рис. 2. Прямое преобразование координат ua, ub, uc → uα, uβ
Математическая модель прямого преобразования в виде матрицы в блоке Gain представлена на рис. 3. Задание матрицы в блоке Gain показано на рис. 4.
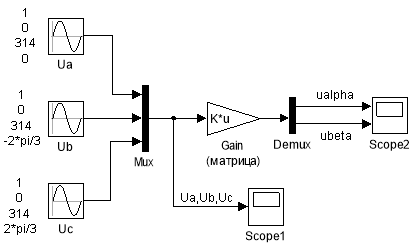
Рис. 3. Прямое преобразование координат ua, ub, uc → uα, uβ в виде матрицы в блоке Gain
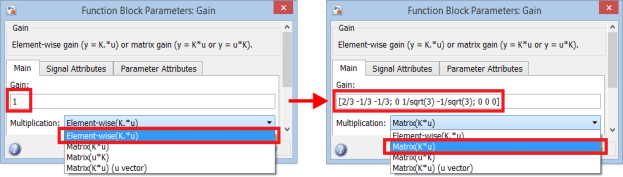
Рис. 4. Задание матрицы в блоке Gain
Задание напряжений ua, ub, uc (рис. 3) и напряжения на выходе преобразователя uα, uβ приведены на рис. 5 и 6.
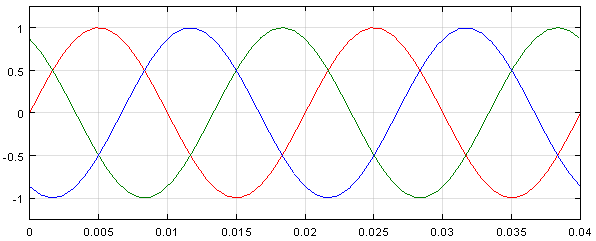
Рис. 5. Графики напряжений ua, ub и uc (Scope 1)
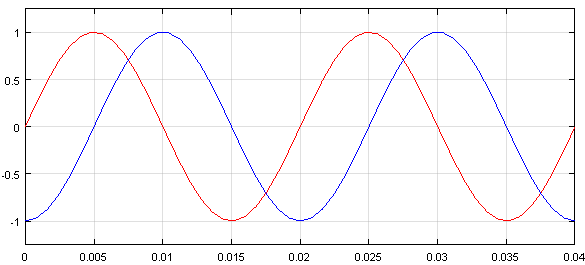
Рис. 6. Графики напряжений uα и uβ (Scope 2)
При соединении статорной обмотки в «звезду» без нулевого провода:
![]()
![]()
Из системы уравнений (3):
![]()
![]()
Тогда система уравнений (3) примет следующий вид:
|
|
(4) |
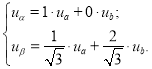
Математическая модель прямого преобразования координат (ua, ub → uα, uβ) приведена на рис. 7.
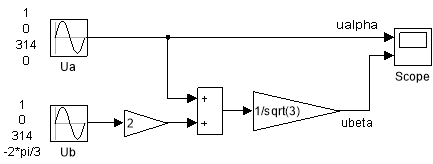
Рис. 7. Прямое преобразование координат ua, ub → uα, uβ
Представим систему (4) в матричной форме:
|
|
= |
1 |
0 |
· |
|
|
|
|
|
|
Схема прямого преобразования в виде матрицы в блоке Gain приведена на рис. 8. Задание матрицы в блоке Gain показано на рис. 9.
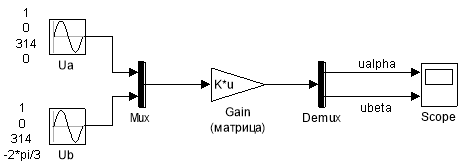
Рис. 8. Прямое преобразование координат ua, ub → uα, uβ в виде матрицы в блоке Gain
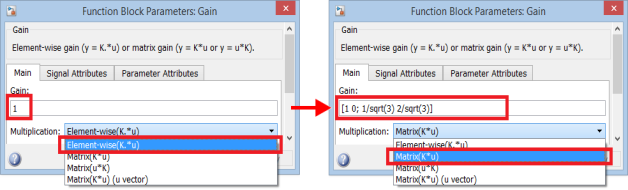
Рис. 9. Задание матрицы в блоке Gain
Результаты моделирования прямого преобразования координат даны на рис. 10.
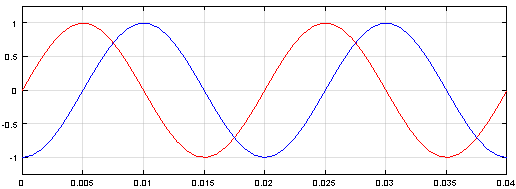
Рис. 10. Графики напряжений uα и uβ
Б) Обратный перевод переменных из двухфазной системы в трехфазную: α, β → a, b, c.
Подставим uα (ua = uα) во второе уравнение системы (4):
![]()
Отсюда выразим ub, для чего умножим это уравнение на ![]() :
:
![]()
![]()
Система уравнений (4) преобразуется к виду:
|
|
(5) |
В матричной форме:
|
|
= |
1 |
0 |
· |
|
|
|
|
|
|
Математическая модель обратного преобразования координат (uα, uβ → ua, ub, uc) в матричной форме дана на рис. 11. Задание матрицы в блоке Gain показано на рис. 12.
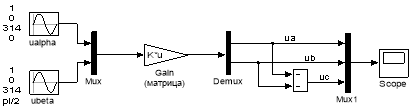
Рис. 11. Обратное преобразование координат uα, uβ → ua, ub, uc
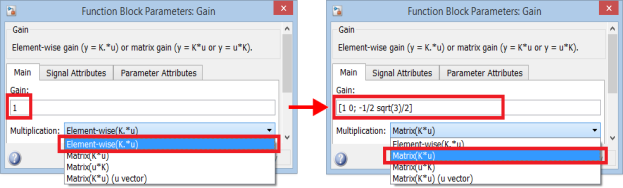
Рис. 12. Задание матрицы в блоке Gain
Результаты моделирования обратного преобразования координат даны на рис. 13.
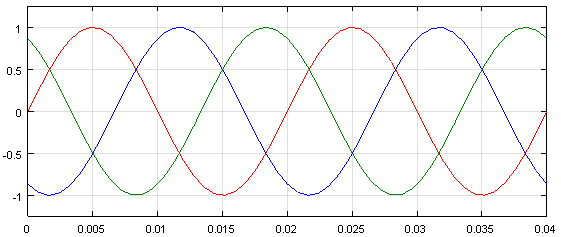
Рис. 13. Графики напряжений ua, ub и uc
Литература:
- Емельянов А.А., Бесклеткин В.В., Авдеев А.С., Чернов М.В., Киряков Г.А., Габзалилов Э.Ф., Прокопьев К.В. Математическое моделирование САР скорости системы «АИН ШИМ – АД» с переменными ψr – is на основе интегрирующих звеньев в Script-Simulink // Молодой ученый. — 2016. — №2. — С. 49-66.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. – 654 с.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.

