





Рассмотрим систему, состоящую из исполнительной электрической машины (ЭМ), механизма передачи вращательного движения с коэффициентом редукции i1 и объектом управления (ОУ). В качестве исполнительного элемента принимается электрическая машина (ЭМ) постоянного тока с независимым возбуждением. Обозначим через ![]() момент инерции якоря электрической машины (ЭМ), Jp — момент инерции редуктора. Пусть угол поворота вала электрической машины (ЭМ) (якоря) есть я. Если Мн — момент, прикладываемый к объекту управления (ОУ) со стороны электрической машины (ЭМ) в режиме двигателя, то уравнение вращательного движения, согласно работам Крутько П. Д. [1–4], а также Джолдасбекова У. А. и Молдабекова М. М. [5, 6], можно записать в виде:
момент инерции якоря электрической машины (ЭМ), Jp — момент инерции редуктора. Пусть угол поворота вала электрической машины (ЭМ) (якоря) есть я. Если Мн — момент, прикладываемый к объекту управления (ОУ) со стороны электрической машины (ЭМ) в режиме двигателя, то уравнение вращательного движения, согласно работам Крутько П. Д. [1–4], а также Джолдасбекова У. А. и Молдабекова М. М. [5, 6], можно записать в виде:
![]()
![]() ,(1)
,(1)
Где q есть n – мерный вектор столбец обобщенных координат, характеризующих конфигурацию системы; A(q) — матрица инерции подвижных элементов системы; ![]() – матрица кориолисовых и центробежных сил инерции, а также сил трения; C(q) — матрица, обусловленная силами тяжести; M – электромагнитный момент, развиваемый электрической машиной (ЭМ).
– матрица кориолисовых и центробежных сил инерции, а также сил трения; C(q) — матрица, обусловленная силами тяжести; M – электромагнитный момент, развиваемый электрической машиной (ЭМ).
Систему (1) можно привести к одному уравнению, если использовать кинематическое соотношение ![]() и провести пересчет моментов, стоящих в правой части первого уравнения, к второй. Выполняя указанные действия, получим:
и провести пересчет моментов, стоящих в правой части первого уравнения, к второй. Выполняя указанные действия, получим:
![]() (2)
(2)
Где ![]()
Электрическая часть системы, согласно работам Чиликина М. Г. и Сандлера А. С. [7], Лунца Я. Л. [8], Крутько Л. Д. [1–4], описывается уравнениями:
![]() ,
,
M = KmI,(3)
Где L, R1 — индуктивность и активное сопротивление якорной цепи; I, U — ток и напряжение цепи якоря; Kw, Km — коэффициент противо-ЭДС и вращательного момента; кy, y – коэффициент усиления и постоянная времени усилителя; ![]() — входное напряжение усилителя.
— входное напряжение усилителя.
Вводим электрическую постоянную времени:
![]()
Обычно, согласно Крутько П. Д. [1–4]y<<э. Отсюда ![]() . Тогда в качестве управляющей функции выступает напряжение и. Умножая первое уравнение (3) на
. Тогда в качестве управляющей функции выступает напряжение и. Умножая первое уравнение (3) на ![]() , приведем его к виду:
, приведем его к виду:
 (4)
(4)
Наряду с полной моделью (4) будем использовать далее так же упрощенную модель, в которой не учитываются процессы в якорных цепях исполнительных электрических машин ЭМ. В (4) принимая электрическую постоянную времени э=0, будем иметь:
 ,(5)
,(5)
При безынерционном усилителе (у=0) из (2), (3) получим:
![]()
(6)
Следуя Крутько Л. Д. [1–4], проблему управления движением сформулируем следующим образом: в начальный момент времени t=0 состояние управляемой системы характеризуется значениями:
qj(o)=qjo,![]() ,(j=1,…,n)(7)
,(j=1,…,n)(7)
Требуется синтезировать такой алгоритм вычисления управляющих напряжений
![]() , (j=1,…,n)(7a)
, (j=1,…,n)(7a)
при котором, управляемая система перемещается за конечное время из точки (7) в окрестность траектории:
qj* = qj(t), (j=1,…,n)(8)
и остается в этой окрестности при последующем движении.
Согласно сформулированным требованиям, следуя Бойчуку Л. М. [9], отклонения j(t)=qj0-qj должны подчиняться в процессе управления дифференциальным уравнениям:
![]() , (j=1,…,n)(9)
, (j=1,…,n)(9)
Где ![]() — положительные константы.
— положительные константы.
Следуя Крутько Л. Д. [1–4], и на основании (9) заключаем, что программное движение (8) будет реализовано только в том случае, когда ускорения ![]() изменяются по закону:
изменяются по закону:
Следовательно, искомые законы (7а) формирования управляющих напряжений, которые обеспечивают реализацию программного движения (8), могут быть найдены подстановкой ускорения ![]() из (10) в (2). Такая подстановка дает
из (10) в (2). Такая подстановка дает
 (11)
(11)
Где he – диагональные матрицы
he = diag {h1e, h2e,…,hne}, (e=o,…,1)
Для окончательного решения задачи синтеза, т. е. для определения закона формирования управляющих напряжений, подставим выражение М0 из (11) в соотношение (5):
 (12)
(12)
Где Cm = diag {Cm1, Cm2,…,Cmn},(m=1,…,2), элементы которой  ,
, 
(j=1,…,n)
и откуда
 (13)
(13)
Таким образом, основу алгоритма управления по принципу обратной связи составляют соотношения (11) и (12). На рис.1 представлена структурная схема замкнутой системы автоматического управления.
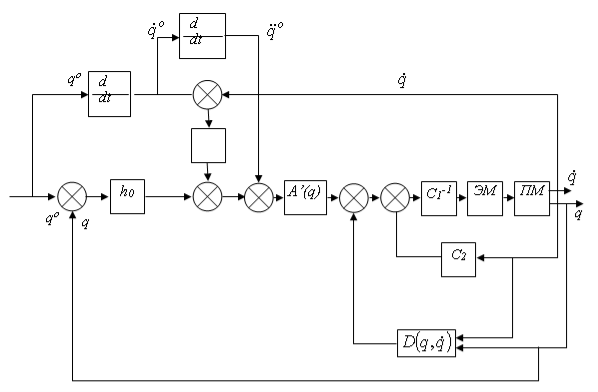
Рис. 1.
Здесь ![]()
Из рисунка видно, что замыкание контуров приводных электрических машин ЭМ осуществляется по переменным ![]() , значения которых используются при вычислении сигналов
, значения которых используются при вычислении сигналов![]() , C(q) и C2q, а также при определении рассогласований по положению и скорости. На практике вместо производных
, C(q) и C2q, а также при определении рассогласований по положению и скорости. На практике вместо производных ![]() могут использоваться угловые скорости
могут использоваться угловые скорости ![]() , (j=1,…,n). Управляющие напряжения для каждой исполнительной электрической машины ЭМ вычисляются согласно (13) по текущим значениям всех управляемых кинематических переменных и скоростей их изменения qj(t),
, (j=1,…,n). Управляющие напряжения для каждой исполнительной электрической машины ЭМ вычисляются согласно (13) по текущим значениям всех управляемых кинематических переменных и скоростей их изменения qj(t),![]() , т. е. управляющее напряжение на отдельный привод формируется с учетом состояния управляемого механизма по всем степеням подвижности.
, т. е. управляющее напряжение на отдельный привод формируется с учетом состояния управляемого механизма по всем степеням подвижности.
Из работ Малкина И. Г. [10] и Меркина Г. Д. [11] известно, что для устойчивой реализации этого алгоритма необходимо и достаточно, чтобы корни характеристического уравнения системы (9)
P2+h1p+ho=0,
имели отрицательные вещественные части. Поскольку, по условию, h1,ho — положительные постоянные, необходимые и достаточные условия устойчивости
Rehe<0(e=0,…,1) выполняются для любых h1, ho.
Литература:
- Крутько Л. Д. Алгоритмы адаптивного управления исполнительными системами манипуляторов // Изв. АН. СССР. Техническая кибернетика. — 1988. — № 4. – С. 3–13.
- Крутько П. Д. Обратные задачи динамики управляемых систем. Линейные модели. М.: Наука, 1983. – 271 с.
- Крутько П. Д., Лакота Н. А. Метод обратных задач динамики в теории конструирования алгоритмов управления манипуляционных роботов. Осуществление назначенных траекторий // Изв. АН СССР. Техническая кибернетика. — 1978. № 4. – С. 190–199.
- Крутько П. Д., Лакота Н. Я. Метод обратных задач динамики в теории конструирования алгоритмов управления манипуляционных роботов. Задача стабилизации // Изв. АН СССР. Техническая кибернетика. — 1987. — № 3. – С. 127–135.
- Джолдасбеков У. А., Молдабеков М. М. Уравнения динамики манипуляционных устройств высоких классов // В сборнике: Математическое моделирование задач теории механизмов и машин. — Алма-Ата. 1987. – С. 3–9.
- Джолдасбеков У. А., Бияров Т. Н. Динамика двухзвенного робота — манипулятора // В сборнике: Вопросы теории механизмов и управления машинами. Алма-Ата, 1986. – С. 3–8.
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода, М.: Энергоиздат, 1981. – 576 с.
- Лунц Я. Л. Введение в теорию гироскопов. — М.: Наука, 1972. – 296 с.
- Бойчук Л. М. Метод структурного синтеза нелинейных систем автоматического управления, М.: Энергия, 1972. — 112 с.
- Малкин И. Г. Теория устойчивости движения. – М.: Наука, 1966. – 532 с.
- Меркин Г. Д. Введение в теорию устойчивости. М.: Наука,1987. – 304 с.
