




На данный момент на рынке товаров для спортивной и любительской рыбалки нет бытовых приборов, позволяющих не только обнаруживать рыбу, но и определять её вид и поведение. При этом такая информация очень важна для рыбака. Знание вида рыбы позволяет более грамотно подобрать оснастку, кроме того, некоторые рыбаки ставят себе целью поймать определенный вид рыбы. Информация о поведении рыбы не менее важна, чем о ее наличии, так как спящая или сытая рыба не будет бросаться на приманку, а значит, её невозможно поймать.
Из литературы известно, что рыба способна издавать звуки, и эти звуки различны для разных видов и поведения рыбы. Таким образом, бытовой прибор, способный регистрировать звуки, издаваемые рыбой и анализировать их, мог бы предоставлять гораздо большей полезной для рыбака информации о рыбе, чем эхолоты.
Целью данной работы является анализ осуществимости создания пассивного акустического сонара для обнаружения и пеленгации рыбы, который позволит проводить регистрацию звукового (инфразвукового) сигнала, издаваемого рыбами, и разработка его конструкции.
Описание прибора.
Сонар состоит из датчика инфразвука, электронной схемы, системы информационного обмена (Bluetooth или WiFi), акселерометров и гироскопов, помещенных в герметичный корпус из ударопрочного пластика. Сонар должен стоять на якоре в толще воды. Инфразвук, зарегистрированный сонаром передается на смартфон для анализа.
Одной из ключевых задач проекта является выбор или разработка датчика для инфразвука. Было рассмотрено несколько вариантов устройства датчика:
- Датчик на основе гибкой мембраны, соединенной с пьезокерамическим элементом.
- Датчик на основе инерционной навигационной системы, включающей акселерометр, гироскоп и магнитометр. Такой датчик будет фиксировать движение всего сонара.
- Датчики на основе тензометрического датчика, соединенного с шарнирно закрепленным жестким волоском. Это решение аналогично тому, которое используется рыбами для детектирования инфразвука (боковая линия, представляющая собой оттопыренные чешуйки и волоски, давящие на нервные окончания).
В ходе консультации с экспертами в области гидроакустики было высказано предположение, что при малой массе прибора наибольший результат будет давать датчик на основе ИНС, так как колебания всего сонара как целого будет гораздо больше колебаний мембраны или волоска относительно корпуса.
Результаты экспериментов.
В ходе НИР был разработан первый прототип пассивного акустического сонара на основе ИНС, который представляет собой плату STM32F3 Discovery с присоединенным к ней разъемом для microSD и блоком питания и помещенную в герметизированный корпус. Запись данных с акселерометра и гироскопа производится на microSD, после чего анализируется на компьютере.
Для оценки характеристик акселерометра LSM303DLHC было произведено снятие шума с датчика в неподвижном состоянии. Минимальная регистрируемая разность между различными показаниями акселерометра составила ~0,01m/s2. Амплитуда колебаний шума достигает ~0.05m/s2. Следовательно, сигналы амплитудой меньшей чем ~0.005m/s2 обнаружены быть не могут, а больше ~0.05m/s2 могут быть выделены без применения фильтрации. Считая шум аддитивным и стационарным, для определения возможности выделения сигналов с известным спектром и амплитудой лежащей внутри этого диапазона можно сравнить их спектральную мощность со спектральной мощностью шума.
На рис. 1 приведены спектры собственного шума датчика для различных каналов акселерометра. Данные снимались с датчика, находящегося в состоянии покоя.
Также были определены спектральные характеристики шума в водной среде. Исследования проводились как в бассейне объёмом 2 м3, так и в естественных водоёмах.
В результате исследований шумовых характеристик в бассейне и в естественном водоёме, были получены спектры, изображенные на рис. 2 и рис. 3.
Везде изображены 90 % от отрезка времени в 2–3 с. с размером окна FFT в 512 сэмплов и перекрытием 1/2.
В эксперименте по регистрации звука плата подвешивалась на расстоянии порядка нескольких сантиметров от колонки. На колонку подавались синусоидальные сигналы частотой от 10 до 364 Hz с шагом в 6 Hz. Снятие данных с акселерометра производилось на частоте в 1 KHz(см. рис. 4).
В целом, АЧХ акселерометра можно считать плоской до частоты в 250 Hz (отклонение АЧХ на ±3 dB и поведение при частотах ниже до 50 Hz являются нормальным (типичные АЧХ для колонок на рис. 5)).
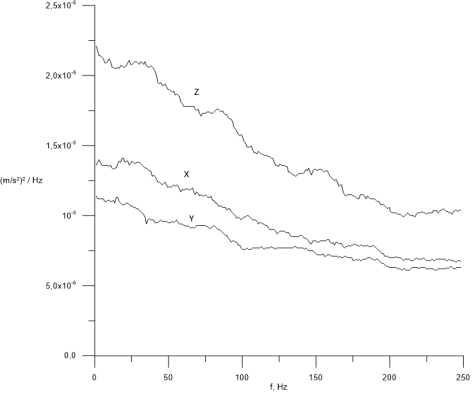
Рис. 1. Спектральная плотность мощности от частоты для различных каналов (Z параллельно g)
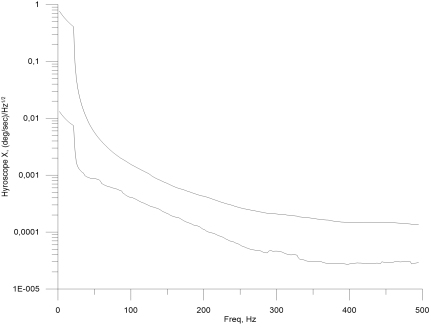
Рис. 2. Спектральная плотность мощности от частоты по показаниям гироскопа для естественного водоёма и бассейна
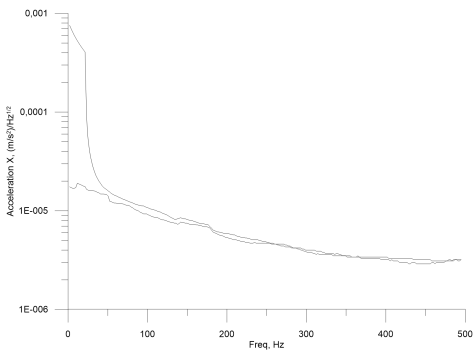
Рис. 3. Спектральная плотность мощности от частоты по показаниям акселерометра для естественного водоёма и бассейна
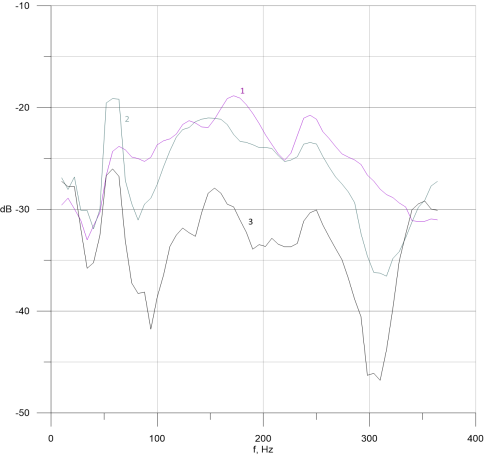
Рис. 4. Уровень сигнала в различных экспериментах. 1 — вплотную к динамику, 2 — на расстоянии ~5 см, 3 — на расстоянии ~5 см, но с меньшей громкостью
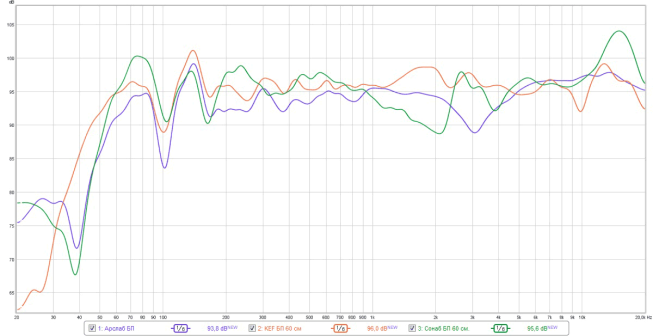
Рис. 5. АЧХ 3 различных колонок(Arslab Classic 3, KEF Xq40, Sonab B32) [4] для сравнения
Амплитуду ускорения можно найти по формуле a=10dB/20.
Наименьшее значение в -45 Дб соответствует 0.005 m/c2, наибольшее —0.1 m/c2.
Следовательно, резкий провал на 3-м графике (рис.7) в районе 300 Hz связан с тем, что амплитуда сигнала стала меньше чувствительности акселерометра (0.01 m/c2).
В прямоугольном бассейне датчик погружался в воду на различных расстояниях от динамика, также погруженного в воду. На динамик подавался сигнал, спектрограмма которого изображена на рис. 6. В результате по показаниям датчика также была построена спектрограмма. На рис 7 и рис. 8 приведены спектрограммы принятого сигнала на расстояниях 5 см и 30 см.
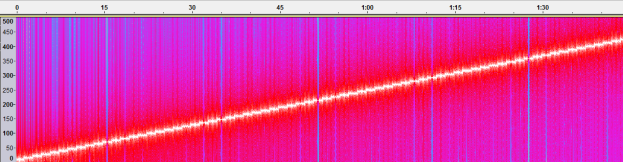
Рис. 6.
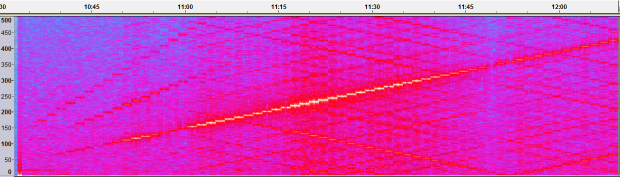
Рис. 7.
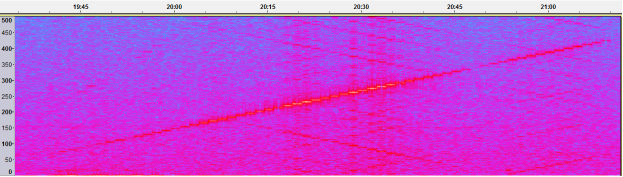
Рис. 8.
Заключение.
В ходе работы над проектом был разработан датчик для инфразвука на основе ИНС, изучены его характеристики (собственный шум датчика и АЧХ). Также был создан первый прототип пассивного акустического сонара и проведены его испытания. Сонар успешно регистрирует инфразвук, издаваемый колонкой в воде.
Для оценки характеристик акселерометра LSM303DLHC было произведено снятие шума с датчика в неподвижном состоянии. Минимальная регистрируемая разность между различными показаниями акселерометра составила ~0,01m/s^2. Амплитуда колебаний шума достигает ~0.05m/s^2. Следовательно, сигналы амплитудой меньшей чем ~0.005m/s^2 обнаружены быть не могут, а больше 0.05m/s^2 могут быть выделены без применения фильтрации.
АЧХ акселерометра (приведена в отчете) можно считать плоской до частоты в 250 Hz (отклонение АЧХ на ±3 dB и поведение при частотах ниже до 50 Hz являются нормальным (сравнение с типичными АЧХ для колонок).
Литература:
- Касумян А. О. Звуковая сигнализация у рыб. — М.: Издательство Московского университета, 2009. — 154 с.
- Гирса И. И. Освещенность и поведение рыб. — М.: Наука, 1981. — 164 с.
- Новицкий Р. О боковой линии рыб и инфразвуковой локации // Спортивное рыболовство. — 2002. — № 2
- Напольные трехполосные колонки Arslab Classic 3 с 4 динамиками, обзор // Audiomania. URL: http://www.audiomania.ru/content/art-4555.html (дата обращения: 21.02.2017).
