




Ключевые слова: почвообрабатывающая машина, мехатронная система, рабочий орган, гибкий трубчатый элемент
Keywords: tillage machines, mechatronic control systems, ground tool, flexible tubular element
Внедрение ресурсосберегающих технологии обусловливает совершенствование машин для обработки почвы. К рабочим органам современных почвообрабатывающих машин предъявляются требования, связанные с необходимостью точного соблюдения агротехнических норм, обеспечения устойчивого движения при проведении технологических операций при минимальных энергетических затратах. Широкое распространение мехатронных систем для управления различными технологическими операциями в аграрном производстве [1] служит основой для создания почвообрабатывающих машин с управляемыми рабочими органами, почвообрабатывающих роботов, способных точно соблюдать и агротехнические нормы и адаптироваться к внешним условиям. Разработка и внедрение таких машин ограничивается отсутствием надежных приводов рабочих органов, позволяющих работать в условиях значительного загрязнения и абразивной среды.
Вместе с тем, предложен ряд конструкций рабочих органов с использованием в качестве силовых узлов гибких трубчатых элементов [2, 3, 4, 5, 6]. Гибкие трубчатые элементы представляют из себя С-образные или S-образные герметичные тубы с некруглой формой поперечного сечения (эллиптической, плоскоовальной). При подаче давления в полость гибкого трубчатого элемента рабочей жидкости происходит деформация сечения, в результате этого её свободный конец совершает перемещение. При подаче пульсирующего давления элемент совершает колебательные движения с определенной амплитудой и частотой, которые зависят от параметров подаваемого давления.
Применение таких элементов открывает возможность управления рабочими органами: изменение их геометрии в процессе выполнения технологической операции, осуществление импульсного воздействия на почву для снижения энергозатрат.
Цель исследования — разработка мехатронной системы управления почвообрабатывающих машиной.
Задачами исследования являются разработка обобщенной структуры почвообрабатывающей машины с мехатронной системой и разработка лабораторно-полевой установки с мехатронной системой управления рабочим органом почвообрабатывающей машины.
На рисунке 1 представлена обобщенная структура почвообрабатывающей машины с мехатронной системой управления.
Интеллектуальные устройства или модули представлены двумя основными компонентами: бортовым компьютером трактора, либо программируемым контроллером и информационно-измерительными устройствами.
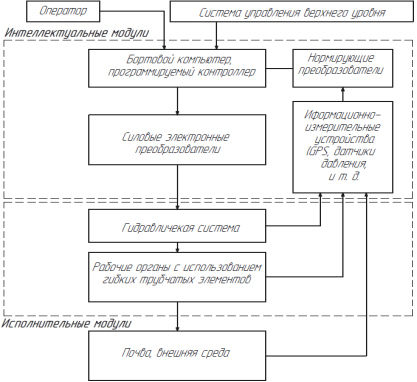
Рис. 1. Обобщенная структура почвообрабатывающей машины с мехатронной системой управления
Интеллектуальные устройства выполняют следующие основные функции [7]: управление процессом механического движения системы в реальном времени с обработкой сенсорной информации; координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами; взаимодействие с оператором через интерфейс в режимах off-line и непосредственно в процессе работы (on-line); организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Информационно-измерительные устройства могут быть представлены GPS-датчиком, датчиками силы, давления, расхода топлива и т. д.
В качестве исполнительных модулей предлагается использовать гидропривод и рабочие органы с использованием гибких трубчатых элементов.
Гидравлическая система представляет собой гидропривод с электрическим пропорциональным управлением, позволяющий осуществить дистанционное бесступенчатое регулирование параметров потока рабочей жидкости.
Для решения вопроса повышения качества обработки почвы, снижения тягового сопротивления на криволинейных участках траектории движения агрегата предложена конструкция рабочего органа (рис. 2) с использованием в качестве силового элемента витой трубчатой пружины. Витая трубчатая пружина 2 представляет из себя закрученную герметичную трубку с некруглой формой поперечного сечения. При подаче давления в полость витой трубчатой пружины рабочей жидкости происходит деформация сечения, в результате этого её свободный конец поворачивается вокруг оси на угол φ. При подаче пульсирующего давления элемент совершает колебательные движения с определенной амплитудой и частотой, которые зависят от параметров подаваемого давления.
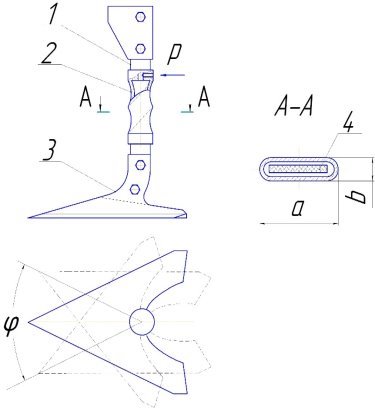
Рис. 2. Рабочий орган культиватора со стойкой в виде витой трубчатой пружины: 1 — стойка; 2 — витая трубчатая пружина; 3 — рыхлительная лапа; 4 — вкладыш из неупругого материала
Рабочий орган данного типа может быть применен в конструкции почвообрабатывающих машин с фронтальной навеской.
Для оценки возможности применения витой трубчатой пружины для поворота рабочего органа произведен расчет напряженно-деформированного состояния витой трубчатой пружины (рис. 3 а). Данная задача решена методом конечных элементов при помощи программного пакета Solidworks. Материал пружины — сталь 50ХФА, предел текучести при 20ºС σт = 2480МПа, модуль Юнга Е = 2,18·10–5 МПа. Геометрические параметры пружины: толщина стенки — 6 мм; шаг витков -220 мм; большая ось сечения a=80 мм; малая ось сечения b=28 мм; Количество элементов при построении сетки — 9627 шт. Рассматривается напряжённо-деформированное состояние пружины под действием внутреннего давления от 1 до 6 МПа, при жестком закреплении нижнего конца (рис. 3 б).
На рис. 3 а показан результат расчета суммарных перемещении под действием давления 3 МПа. Из диаграммы статических перемещений установлено, что свободный конец пружины стремится повернуться во круг своей оси — об этом свидетельствует соответствующий цветовой окрас модели.
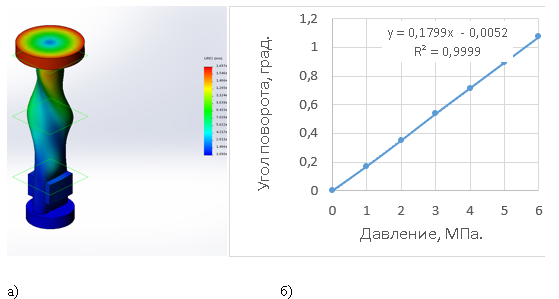
Рис. 3. Витая трубчатая пружина: а) результат расчета суммарных перемещений образца методом конечных элементов при действии внутреннего давления 3 МПа; б) характеристика витой трубчатой пружины
В данном случае верхняя часть изделия стремится совершить перемещение на 0,5 мм что соответствует углу поворота вокруг вертикальной оси 0,17 градуса. На основании расчетов построена характеристика витой трубчатой пружины (рис. 3 б). Из графика видно, что характеристика имеет линейный характер.
В результате анализ напряженного состояния пружины установлено, что максимальные напряжения, возникают на концах большой оси сечения пружины, достигают предела текучести уже при давлении 4 МПа.
Таким образом, применение мехатронных систем управления в сочетании с новыми рабочими органами открывает возможность управления почвообрабатывающей машиной, позволит увеличить скорость выполнения технологической операции на криволинейных участках траектории, снизить нагрузку на рабочие органы, повысить управляемость агрегата.
Литература:
- AGRITECHNICA Neuheiten 2015 — Wegweiser der Agrarbranche! [Электронный ресурс] AGRITECHNICA //: [сайт]. [2015]. URL: https://www.agritechnica.com/de/neuheiten/neuheiten-2015/ (дата обращения: 26.11.2016).
- Устинов Н. Н. Математическая модель активного рабочего органа культиватора со стойкой в виде гибкого трубчатого элемента / Н. Н. Устинов, А. А. Маратканов, Н. И. Смолин // Современные проблемы науки и образования. — 2015. — № 1; URL: http://www.science-education.ru/121–17908 (дата обращения: 18.03.2015).
- Устинов Н. Н. Рабочий орган культиватора/ Сельский механизатор. — 2015. — № 12. — С. 30–31.
- Рабочий орган культиватора: пат. RU № 2009136304 А, Рос. Федерация № 2009136304/21; заявл. 30.09.2009; опубл. 20.09.2011.
- Рабочий орган культиватора: пат. RU № 2428825 С2, Рос. Федерация, № 2009136304/21; заявл. 30.09.2009; опубл. 20.09.2011.
- Рабочий орган культиватора: пат. РФ 116000 U1 Рос. Федерация№ 2011117732; заявл. 03.05.2011, опубл. 20.05.2012. Бюл. № 14.
- Грабченко А. И., Клепиков В. Б., Доброскок В. Л. и др. Введение в мехатронику: уч. пособие. Х.: НТУ «ХПИ», 2014. 264 с.
