В данной статье смоделирована роботизированная техника, в основе которой мы использовали существующий робот-пылесос iRobotRoomba 500. Характерной чертой модернизации было оснащение этого пылесоса манипулятором с автоматизированной щёткой для чистки стекла. Разработанный робот осуществляет уборку в вагонах поездов, обеспечивая наиболее благоприятные условия, удовлетворяющие санитарным нормам.
Ключевые слова: робот-помощник, мобильная роботизированная платформа, санитарные нормы на железнодорожном транспорте, робототехнический комплекс
На сегодняшний день, происходит популяризация роботизированной аппаратуры, заменяющей человека во многих сферах. Наиболее широкое применение получили мобильные роботы, позволяющие существенно облегчить не только производственные процессы, но и отстранить человека от бытовой работы. Главное достоинство робототехнического комплекса — отсутствие человеческого фактора.
На железнодорожном транспорте происходит активная автоматизация процессов для достижения безопасности и комфорта пассажирских перевозок. Обеспечение благоприятных условий в кузове вагонов на железнодорожном транспорте требует поддержания в них чистоты в соответствии с санитарными условиями. Ведь пассажирский вагон, как и другие единицы подвижного состава, требует особого внимания не только на техническое состояние, но и на санитарно-гигиеническую ситуацию. «Санитарные нормы — нормативные акты, устанавливающие критерии безопасности и (или) безвредности для человека факторов среды его обитания и требования к обеспечению благоприятных условий его жизнедеятельности» [1]. В настоящее время уборку в поездах осуществляют специально обученные люди, однако, сегодняшняя действительность такова, что они не справляются с поставленной задачей. Комфорт и чистота окружающей обстановки оставляют желать лучшего. Возникает необходимость построения мобильной роботизированной платформы, основной задачей которой является наиболее эффективная чистка пола и окон в вагонах поездов. Робот «GES» позволит значительно упростить выполнение влажной уборки вагонов на железнодорожном транспорте.
Целью исследования являлась разработка проекта «GES» — мобильной роботизированной платформы, выполняющей функции уборщика в вагонах железнодорожного транспорта. Поставленная цель определила следующие основные задачи исследования:
- Провести информационный поиск;
- Смоделировать конструкцию робота;
- Составить техническую характеристику данного робототехнического комплекса;
- Выделить перечень обязанностей, осуществление которых должна выполнять модернизированная аппаратура.
Гипотеза представленной работы заключается в следующем: использование «Робота GES» для уборки пола и чистки окон в вагоне поездов позволит обеспечить условия, пригодные для комфортной перевозки пассажиров.
Для проведения теоретического эксперимента, были использованы такие методы, как: моделирование (смоделирована мобильная роботизированная платформа), анализ и синтез (проанализировали существующие типы бытовых роботов и выявили наиболее удовлетворяющий), сравнение, идеализация. В работе смоделирован новый тип робота, осуществляющего чистку внутри кузова пассажирских вагонов.
В ходе исследования была создана модель робота (См. рис. 1), который осуществляет уборку в кузове вагона.

Рис. 1. Разработанная модель робота
В основу робота взят пылесос iRobot Roomba 500 (См. рис.2), характеристики которого были применены для моделирования новой модернизированной аппаратуры. GES предназначен для мытья твердых покрытий. Корпусы робота изготовлены из прочного пластика с гладкой полуматовой поверхностью. Они немаркие, мелкие повреждения на них незаметны, и их легко очищать. На верхней панели корпуса1 расположены индикаторы состояния, решетка звукового сигнализатора, механический выключатель питания и разъем низковольтного питания. [4]

Рис. 2. IRobot Roomba 500 Series
На днище корпуса2 расположены два колеса, на которые закрепляются чистящие салфетки, изготовленные из синтетической махровой ткани с двухсторонним ворсом средней длины (См. рис. 3). Каждое колесо имеет свой электрический привод и может вращаться независимо от второго. Мощный вентилятор в корпусе робота во время работы постоянно откачивает воздух из центральной части колес. Колеса с закрепленными кольцами, образуют своеобразные присоски, удерживающие робота на вертикальных поверхностях. [5]

Рис. 3. Корпус 2
Манипулятор управляется с помощью ЭВМ. Подъезжая к окну, он расправляется до максимальных размеров и прижимает корпус2 к окну: сначала одно колесо сильно прижимается к стеклу, а корпус робота начинает медленно вращаться относительно оси этого колеса, в это время второе колесо вращается быстрее, очищая поверхность стекла. После выполнения первого шага робот меняет функции колес и делает следующий шаг. Такой алгоритм движения позволяет перемещаться по стеклу по направлениям: вверх-вниз и вправо-влево, при этом стойка во время движения вниз снова складывается и раскладывается при перемещении в обратном направлении. Границы робот определяет по тому, что упирается колесом в бортик и не может завершить вращение, а также с помощью датчиков, расположенных на корпусе 2, начиная движение в другом направлении.
Для расширения функционала в сенсорную систему данной модернизированной техники включены восемь ультразвуковых датчиков для обнаружения препятствий. Для сбора данных с датчиков предусмотрена плата распознавания аварийной ситуации. Если робот оказывается в непосредственной близости от препятствия, то принимается решение об экстренной остановки, отправляется сигнал оператору и сигнал о необходимости включения аварийной сигнализации. Когда у устройства батарея близка к разрядке, он отправляется на базу для немедленной подзарядки аккумулятора.
Технические параметры робота: общая высота при расправленном состоянии манипулятора составляет 200 см; высота при начальном состоянии манипулятора 120 см; масса корпуса2 в готовом для работы состоянии немного не доходит до килограмма; внешний диаметр колец под салфетки 14 см; скорость 0,3 м/с; время работы без подзарядки 6–8 часов.
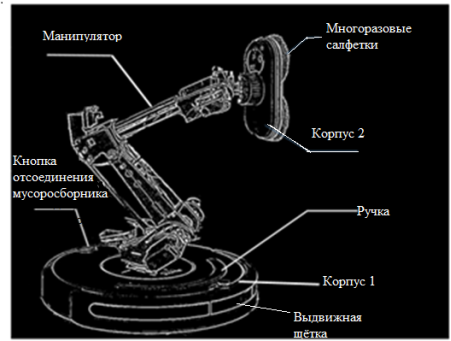
Рис. 4. Общее строение механизма
Роботизированная мобильная платформа имеет возможность распознавания наиболее загрязненных участков. Робот оснащен выдвижной щёткой (См. рис. 5), которая позволяет производить уборку не только открытого пространства, но и пространства под мебелью, вокруг нее, в углах и вдоль стен. В связи компактными размерами данной аппаратуры, устройству не составит труда убирать в труднодоступных местах. Оператор может задавать время начала уборки и дату, аппарат будет работать строго по расписанию.

Рис. 5. Выдвижная щётка
Научная новизна:
1) Смоделирован новый тип робота;
2) Рассмотрены принципы работы робота-помощника, способного производить уборку в кузове вагонов на железнодорожном транспорте;
3) Данная модель ранее не была предложена.
Выводы:
В ходе исследования был смоделирован «Робот GES», рассмотрены принципы работы, технические характеристики устройства, а также выявлены основные преимущества данного робототехнического комплекса. Перечисленные достоинства позволяют эффективно производить уборку в железнодорожных вагонах и ускорять этот процесс.
Робот GES является одним из шагов к решению функциональных, технологических, сервисных и организационных задач, возникающих в ходе обеспечения обслуживания людей.
Данная модель бытового робота заменяет человека на монотонной и тяжелой работе.
Возможна и дальнейшая модернизация модели при более подробном изучении планировки и обустройства вагонов поездов.
В результате проведенной работы была достигнута поставленная цель и реализованы задачи.
Литература:
- Гигиенические требования при работах с источниками воздушного и контактного ультразвука промышленного, медицинского и бытового назначения: Санитарные правила и нормы. — М.: Информационно-издательский центр Минздрава России, 1997.
- Е. В. Поезжаева «Теория механизмов и механика машин» дистанционное образование, Пермь 2007.
- Агапов Е. В., Никулин В. С. «Модернизация модели робота-пылесоса» Автоматика и программная инженерия. 2015, № 1(11) 52. ФГБОУ ВПО «НГТУ», Новосибирск, Россия
- Инструкция робота-пылесоса iRobotRoomba 500
- Использование робота для мытья окон (Интернет источник) URL: http://ubirai.ru/equip/ispolzovanie-robota-dlya-mytya-okon.html

