




Глубиномер — разновидность манометра, предназначенная для определения глубины погружения. Используется для определения глубины, на которой находится прибор в настоящее время, и максимальной глубины погружения. Обычно глубиномер выполняется либо в виде прибора, надеваемого на руку, либо в виде одной из составляющих консоли.
От точности и правильности показаний глубиномера зависит здоровье, а порой и жизнь аквалангиста. При выборе глубиномера следует определиться с тем, где планируете его использовать (море, загрязнённый водоём, высокогорные озёра, глубины и т. д.) Также нужно обратить внимание на какую систему рассчитан глубиномер, метрическую или империальную. Крайне удобно, когда функция измерения глубины включена в число функций компьютера. Нет необходимости брать с собой под воду лишний прибор [1].
По принципу действия глубиномеры могут быть:
– капиллярные
– открытая трубка Бурдона
– масляные
– диафрагменные
– тензорезисторные (цифровые)
Ультразвуковой глубиномер
Измерение глубины дна акватории — или поиск затонувших предметов возможны с помощью ультразвукового глубиномера, схема и краткое описание которого приводится ниже.
Принцип действия прибора основан на отражении кратковременных ультразвуковых импульсов от речного или морского дна. При этом измеряется не время прохождения импульсов в толще воды (скорость звука в воде 1500 м/сек), а количество отраженных в единицу времени импульсов. Глубина проникновения ультразвуковых импульсов определяется мощностью излучения и чувствительностью приемного устройства. В описываемом приборе она не превышает 20 м.
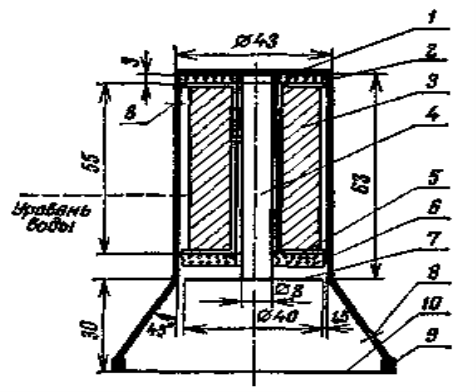
Рис. 1. Схема ультразвукового глубиномера
Глубиномер состоит из двух частей: магнитострикционного датчика и электронного блока. Магнитострикционный датчик (его устройство показано на рис. 1) представляет собой никелевый стержень 4, закрепленный с помощью медного кольца 1 в корпусе 2. На стержень надет каркас 5 с намотанными на него катушками 3, герметизированный пробковой прокладкой 6 [2–3].
Ультразвуковые колебания (их амплитуда максимальна при резонансе частот) никелевого стержня и пластины 7 передаются водной среде. Чтобы исключить колебания уровня воды в раструбе датчика, он закрыт резиновой мембраной с толщиной 0,5–0,8 мм, которая удерживается с помощью бандажа 9. При измерениях через отверстие 8 в раструб заливается вода. Электронный блок (рис. 2) состоит из ультразвукового генератора, собранного на транзисторах T1, Т2, модулятора на транзисторах Т3, Т4, приемника отраженных импульсов Т5-Т8 и стрелочного индикатора, шкала которого калибрована в метрах глубины.
Авиационный глубиномер
Известен глубиномер лот, основанный на использовании грузила, привязанного на веревке.
Основной недостаток данного глубиномера состоит в том, что с ее помощью сложно определять глубину водоемов с высоты полета самолета.
Наиболее близким техническим решением является глубиномер эхолот, содержащий импульсную ультразвуковую установку, приемник ультразвука и вычислительное устройство. Основной недостаток данного глубиномера состоит в том, что с ее помощью сложно определять глубину водоемов с высоты полета самолета. Предлагаемым изобретением решается задача определения глубины водоемов непосредственно в полете воздушного судна [4–6].
Это достигается тем, что в глубиномере, содержащем импульсную установку, приемник и вычислительное устройство, согласно предлагаемому изобретению, используют импульсный лазер, чувствительное фотоприемное устройство на основе узкозонных полупроводниковых материалов и вычислительное устройство, определяющее глубину водоема по времени, протекающему между моментами приема отраженных от поверхности воды и дна водоема лучей импульсного лазера, и скорости распространения света в воде.
Сущность изобретения заключается в следующем. В предлагаемом авиационном глубиномере, в отличии от прототипа, используются импульсный лазер, чувствительный фотоприемник, изготавливаемый на основе узкозонных полупроводниковых материалов. Дело в том, что луч лазера, падая на поверхность воды, преломляется, а отраженный луч идет вверх от поверхности воды под углом 90о к преломленному лучу, идущему в воде к дну водоема, от которого также отражается, а выходя из воды попадает на чувствительный фотоприемник. При этом, в вычислительном устройстве высчитывается время, протекающее между двумя приемами отраженных лучей, и значение глубины водоема определяется путем умножения этого времени на скорость распространения света в воде и деления полученного произведения на два.
Суть предлагаемого изобретения можно пояснить с помощью фиг.1, на которой схематически показаны самолет, луч лазера, его преломление, отраженный от поверхности воды луч и отраженный от дна водоема. На данном рисунке: 1 — самолет, 2 — луч лазера, 3 — преломленный луч лазера, 4 — отраженный от поверхности воды луч лазера, 5 — отраженный от дна водоема луч, 6 — катет, перпендикулярно опускающийся от поверхности воды к дну водоема, 7 — поверхность воды, 8 — дно водоема, 9 — луч лазера, выходящий из воды. Из рисунка видно, что лазерный луч 2, испускаемый из самолета 1, при попадании на поверхность воды преломляется 3 и в тот же момент отражается 4 от поверхности воды. Луч лазера отражается также от дна водоема 5, а 6 — это катет, перпендикулярно опускающийся от поверхности воды к дну водоема. Реализация такого глубиномера возможна только с применением самолета или вертолета. Дело в том, что, именно, самолет может быстро пролететь необходимое расстояние, чтобы осуществить прием отражающегося от воды луча лазера, а также луча, отраженного от дна водоема и выходящего из воды. Следует отметить, что отраженные лучи очень ослабленные, особенно луч, вышедший из воды. Поэтому для их приема нужен очень чувствительный фотоприемник. В качестве такого фотоприемника мы использовали фоторезисторную матрицу, изготовленную на основе антимонида индия (InSb), имеющего ширину запрещенной зоны, примерно, 0,2 эВ. Экспериментальные исследования показали работоспособность предлагаемого авиационного глубиномера.
Таким образом, цель предлагаемого изобретения, а именно, определение глубины водоемов непосредственно в полете воздушного судна, достигается. Следует отметить, что такой глубиномер может позволить осуществлять быстрое обследование дна моря или океана.
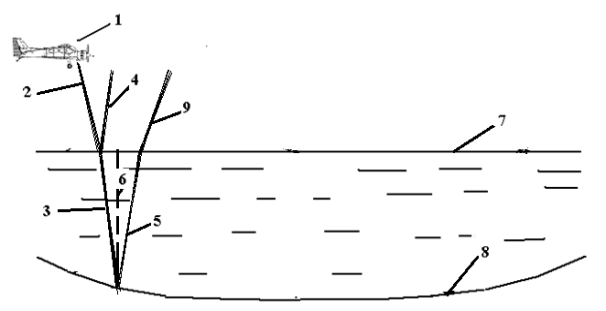
Рис. 2. Процесс определения глубины водоема
Авиационный глубиномер, содержащий импульсную ультразвуковую установку, приемник ультразвука и вычислительное устройство, отличающийся тем, что используют импульсный лазер, чувствительное фотоприемное устройство на основе узкозонных полупроводниковых материалов и вычислительное устройство, определяющее глубину водоема по времени, протекающему между моментами приема отраженных от поверхности воды и дна водоема лучей импульсного лазера, и скорости распространения света в воде [7–11].
Актуальность
Авиационный глубиномер, содержит импульсную установку, приемник и вычислительное устройство,
Новым является то, что используют импульсный лазер, чувствительное фотоприемное устройство на основе узкозонных полупроводниковых материалов и вычислительное устройство, определяющее глубину водоема по времени, протекающему между моментами приема отраженных от поверхности воды и дна водоема лучей импульсного лазера, и скорости распространения света в воде.
Технический результат состоит в создании авиационного глубиномера, позволяющего определять глубину водоемов непосредственно в полете воздушного судна.
Литература:
- Стрикленд-Констэбл Р. Ф. Глубиномеры и их свойства: Пер. с англ. — Л.: Недра, 1971. — 412 С.
- V. Henri. ChemicalReviews, 4, 189, 1927
- И. Н. Крупский, А. И. Прохватилов, В. М. Гасан. Письма в ЖЭТФ, том 17, вып. 11, стр. 605–607, 1973
- А. В. Леонтьева, В. А, Романуша, А. Ю. Прохоров, Л. В. Степанчук. Приборыдляизмеренияглубины, том 30, в. S, 1988
- А. Nijman and N. Trappeniers, Physica 95 B, 147 (1978)
- J. Nijman, N. J. Trappeniers, Chem. Phys. Letters47, 118 (1977)
- J. Nijman, J. Berlinsky, Phys. Rev. Letters38 (8), 408 (1977)
- M. Sprik, A. Nijman and N. Trappeniers, Physica 98A, 231 (1979)
- Yuki Miyamoto, Mizuho Fushitani, Daisuke Ando, Takamasa Momose, J. of Chem. Phys. 128, 114502 (2008)
- Краснов В. Н. История навигационной техники: Зарождение и развитие технических средств кораблевождения. Институт истории естествознания и техники им. С. И. Вавилова — М.: Наука, 2001. — 312 с.
- Морской энциклопедический словарь. Дмитриев В. В. — Санкт-Петербург: Судостроение, 1993. — Т. 2. — С. 220. — 583 с.
