Предлагается автомобильная система, снижающая вероятность дорожно-транспортных происшествий за счет анализа окружающей обстановки и корректировки поведения транспортного средства. Анализ осуществляется с помощью датчиков, расположенных по периметру транспортного средства, и система на основе нечеткой логики выдает сигнал о корректировке движения транспортного средства при необходимости.
Ключевые слова: дорожно-транспортное происшествие, безопасность на дороге, активная автомобильная система безопасности, нечеткая логика.
Безопасность дорожного движения актуальная проблема современного общества. Количество транспортных средств во всем мире постоянно увеличивается, Россия не исключение. На 1 января 2016 года автопарк России составляет 40 млн 900 тысяч легковушек. Таким образом, обеспечение безопасности на дороге становится одной из важнейших проблем.
С января по апрель 2016 года только в России произошло 43 890 дорожно-транспортных происшествий (ДТП). В автомобильных авариях погибло 4926 человек и пострадало 55749 человек. Самыми распространенными авариями в России за январь-апрель 2016 года стали столкновения автотранспорта (18582 ДТП), на втором месте по частоте оказался наезд на пешеходов (14834 ДТП), а на третьем наезд на препятствие (2877 ДТП). Главной же причиной ДТП в России ГИББД считает нарушения правил дорожного движения [1].
Безопасность движения на автомобильных дорогах обусловлена уровнем подготовки и мастерства водителей, техническим состоянием автомобилей, степенью насыщенности дорог средствами регулирования. В свою очередь, каждый из этих факторов находится в прямой зависимости от экономических возможностей государства. Вот почему во многих странах стандартизация требований к элементам дорожной сети, конструкции транспортных средств и участию человека в процессе дорожного движения происходит в основном за счет совершенствования системы активной безопасности.
Активная безопасность автомобиля — свойство транспортного средства, которое позволяет водителю предотвратить ДТП. При анализе окружающей обстановки используется следующая информация:
- наличие объектов вокруг данного транспортного средства,
- места расположения этих объектов,
- скорость и расстояния до них,
- вид объекта (человек или другое транспортное средство) [2].
Для формирования управляющих воздействийна изменение показателей движения автомобиля предлагается ввести коэффициенты ограничения движения Ki, где i=1…4, характеризующие направление движения транспортного средства вперед, назад, влево, вправо соответственно. При использовании таких коэффициентов скорость движения Vi в том или ином направлении будет формироваться следующим образом:
Vi = V0i*Ki,
где V0i — скорость (вектор скорости) в i-ом направлении, задаваемая водителем.
Для снижения вероятности столкновения значения коэффициентов должны формироваться следующим образом: 0 — если движение в этом направлении необходимо запретить, 1 — если движение не должно измениться, 0…1 — если необходимо замедлить движение и больше 1 — если необходимо ускорить движение [3].
Для формирования коэффициентов предлагается использовать систему управления, основанную на нечеткой логике. По сравнению с реализацией нейросетевого подхода система, основанная на нечеткой логике, имеет ряд преимуществ — ввиду оперирования нечеткими понятиями учитывает неоднозначность поступающих исходных данных, в частности информации о наличии и положении объектов, их скорости. Достоверность классификации определяется показателем степени принадлежности лингвистической переменной (ЛП) к тому или иному лингвистическому высказыванию (ЛВ).
В качестве исходных данных система нечеткого логического вывода СНЛВ использует полученную совокупность сигналов с датчиков, расположенных по периметру транспортного средства. В частности, сигнал о расстоянии до объектов, расположенных вокруг данного транспортного средства.
Общий вид системы нечеткого логического вывода представлен на рисунке 1. Нужно отметить, что в рассматриваемой системе отсутствует блок дефаззификатора, так как выход системы представлен лингвистической переменной.
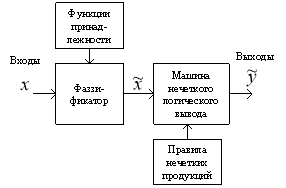
Рис. 1 — Общий вид системы нечеткого логического вывода
Для задания структуры СНЛВ необходимо определить: входные и выходные ЛП; функции принадлежности (ФП) для каждого из ЛВ, значения которых могут принимать ЛП; правила нечетких продукций.
Рассмотрим отдельно сигналы с датчиков только о расстоянии данного ТС до объектов, находящихся вокруг.
Входными данными являются показания с датчиков: Sп — расстояние до объекта впереди данного ТС;Sз — расстояние до объекта сзади данного ТС;Sл — расстояние до объекта слева данного ТС;Sпр — расстояние до объекта справа данного ТС.
Функции принадлежности для входных данных имеют следующий вид (рис. 2):
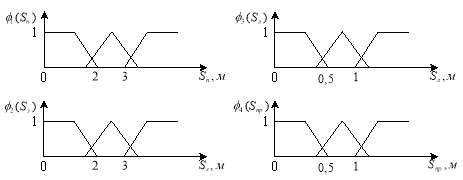
Рис. 2 — Функции принадлежности для входных данных
Если расстояние спереди или сзади ТС становится меньше 2 м, вероятность возникновения дорожно-транспортного средства увеличивается. Если расстояние спереди или сзади ТС больше 3 м, вероятность возникновения дорожно-транспортного средства достаточно мала. Если расстояние слева или справа ТС становится меньше 0,5 м, вероятность возникновения дорожно-транспортного средства увеличивается. Если расстояние слева или справа ТС больше 1 м, вероятность возникновения дорожно-транспортного средства достаточно мала.
Часть правил нечетких продукций СНЛВ для корректировки поведения ТС представлена в табл. 1.
Таблица 1
Базаправил нечетких продукций СНЛВ для корректировки поведения ТС
|
№правила |
Sп, м |
Sз, м |
Sл, м |
Sпр, м |
Решение |
|
1 |
больше 3 |
больше 3 |
больше 1 |
больше 1 |
Кi=1, i=1..4 |
|
2 |
больше 3 |
больше 3 |
больше 1 |
меньше 0,5 |
К1= К2=К3=1, К4=0 |
|
3 |
больше 3 |
больше 3 |
меньше 0,5 |
больше 1 |
К1= К2=К4=1, К3=0 |
|
4 |
больше 3 |
меньше 2 |
больше 1 |
больше 1 |
К1= К3=К4=1, К2=0 |
|
5 |
меньше 2 |
больше 3 |
больше 1 |
больше 1 |
К1=0, К2= К3=К4=1 |
|
6 |
больше 3 |
больше 3 |
меньше 0,5 |
меньше 0,5 |
К1=К2=1, К3=0, К4=0 |
|
7 |
больше 3 |
меньше 2 |
меньше 0,5 |
меньше 0,5 |
К1=1, К2=0, К3=0, К4=0 |
|
8 |
меньше 2 |
больше 3 |
меньше 0,5 |
меньше 0,5 |
К1=0, К2=1, К3=0, К4=0 |
Таким образом, например, при сложной дорожной обстановке, когда внимание водителя ослабляется из-за монотонности вождения система, учитывает текущие параметры движения транспортного средства, а также окружающую обстановку и осуществляет управление путем формирования управляющих воздействий на изменение параметров движения транспортного средства. Использование данной системы с формированием управляющих воздействий позволит снизить вероятность возникновения ряда ДТП в несколько раз.
Литература:
- http://www.gibdd.ru/stat/
- Чекан Н. В. Автомобильная бортовая интеллектуальная система для повышения безопасности транспортных средств. //СБОРНИК работ победителей отборочного тура Всероссийского смотра-конкурса научно-технического творчества студентов вузов «ЭВРИКА» — Новочеркасск. 2012. С. 119–122.
- Варнавский А. Н. Чекан Н. В. Имитационное моделирование столкновения автомобиля с пешеходом при различных способах управления автомобилем //Автоматизация в промышленности. — 2012, № 7. — С. 29–33.

