





В статье рассмотрен колесный робот, который минимизирует риски проноса ОВП в вагоны поездов, что обеспечивает безопасность пассажиров и работников железной дороги.
Ключевые слова: робот, интроскоп, система технического зрения, сканер, навигация
Роботы — это автоматические устройства, выполняющие производственные процессы. Они используются для замены человека в выполнении вспомогательных и основных технологических операций. В современном мире роботы играют важную роль. А именно — человек освобождается от работ, которые могут быть опасны для здоровья или связаны с тяжёлым физическим трудом. К тому же, благодаря использованию в производстве роботов, человек освобождается от монотонных элементарных операций, которые не требуют высокой квалифицированной подготовки.
В настоящее время чрезвычайно актуальной остается проблема предотвращения попыток провоза на всех видах транспорта опасных веществ и предметов (ОВП). С 2013 года на всех железнодорожных, автомобильных, морских и речных вокзалах вводятся в действие зоны досмотра пассажиров и багажа, что потребует соответствующей подготовки и аттестации необходимого количества специалистов, умеющих работать с техническими средствами досмотра.
К настоящему времени рентгенотелевизионный интроскоп (Рис.1) является наиболее доступными и эффективным средством обнаружения ОВП, запрещенных (разрешенных с соблюдением требуемых условий) к перевозке. Привлекательность этих установок связана с тем, что кроме холодного и огнестрельного оружия, они могут обнаруживать взрывчатые вещества (ВВ), наркотики и предметы, запрещенные к свободному перемещению через контролируемую зону.
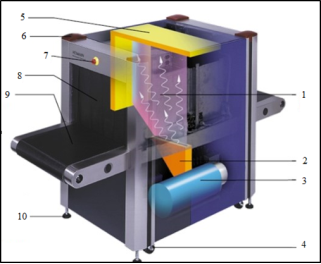
Рис. 1. Компоненты интроскопа: 1 - Рентгеновское излучение; 2 – Коллиматор; 3 – Генератор; 4 – Ролики; 5 - Детекторная линейка; 6 – Индикатор рентгеновского излучения; 7 – Кнопка аварийного останова; 8 – Досмотровый тоннель; 9 – Конвейерная лента; 10 – Регулировочный винт
Гипотеза нашей работы заключается в следующем: внедрение роботов-проводников на железную дорогу минимизирует риски проноса ОВП в вагоны поездов, что обеспечивает безопасность пассажиров и работников железной дороги.
Предложенный нами робот (Рис.2) сканирует билет и просвечивает чемоданы и сумки на предмет взрывчатых веществ, оружия и других запрещённых предметов (перед входом в вагон).
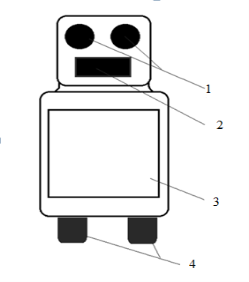
Рис. 2. Схема робота-проводника: 1. Система технического зрения типа «фишай». 2. Лазерный сканер Sick® Lms. 3. Рентгенотелевизионная установка (интроскоп). 4. Колеса с резиновым покрытием
Проводник-интроскоп обладает механическими параметрами: титановый сплав, литий-ионные батареи Roburoc, компьютеры (промышленные или с облегченной комплектацией), система технического зрения типа «рыбий глаз», набор модулей для ночного/дневного режимов работы, устройства беспроводной связи, лазерный сканер Sick® Lms (Рис.3), компьютеризованная навигационная система, приемник GPS, ультразвуковые датчики, датчики ускорения. Колеса с резиновым покрытием (два колеса с резиновым покрытием, обеспечивающее лучшее сцепление с поверхностью, по которой будет двигаться робот. Колеса устанавливаются напрямую к моторам.)

Рис. 3. Лазерный сканер Sick® Lms
Основной составляющей данного робота является интроскоп. Этот прибор представляет собой рентгенотелевизионную установку, предназначенную для досмотра ручной клади (портфелей, сумок, кейсов), контроля посылок, бандеролей и других грузов. Применяется в целях обнаружения взрывчатых веществ, наркотиков и незаконного провоза оружия. Применяется в аэропортах, на объектах связи, транспорта, энергетики, в государственных учреждений и местах массового посещения людей.
Технические параметры робота заключаются в следующем: высота 160 см; примерный вес 80 кг (включая литий-ионные батареи); скорость 0,5 м/с(уменьшение регулируется компьютером); грузоподъемность 35–40 кг; поворот 3600; питание от 5-ти литий–ионных батарей; время работы без перезарядки 8–10 часов; 6 безщёточных электродвигателей; самонавигация, компьютеризированное управление; оптические сенсоры (2 видеокамеры); рабочая температура: 35°С; температура окружающей среды: max 50°C, min -40°C.
Робот способен передвигаться каксамостоятельно, так и с помощью контроля компьютера.
На наш взгляд, основной задачей данного робота является предотвращение терактов на железной дороге, посредством рентгенотелевизионного просвечивания багажа и ручной клади пассажиров на предмет наличия холодного и огнестрельного оружия, взрывчатых веществ, наркотиков и предметов, запрещенных к свободному перемещению через контролируемую зону.
Также, одной из главных функций робота-интроскопа можно назвать сканирование документов (билетов и паспортов) граждан, таким образом он выполняет работу проводника поезда.
При помощи современной системы технического зрения робот осуществляет контроль над обстановкой на доверенном ему участке железнодорожной платформы.
Предложенный вариант базируется на использовании в системах видеонаблюдения широкоугольных объективов типа «рыбий глаз» (Рис.4), имеющих угловое поле, превышающее 180°.
Нами предложен принцип навигации мобильного робота, способного функционировать в сложном неизвестном ландшафте (железнодорожная платформа), который обеспечивает хорошее пространственное разрешение и устойчивость к эффектам многомаршрутности, а также новые оптические средства для реализации «технического зрения».

Рис. 4. Мегапиксельная панорамная IP камера с объективом типа «Рыбий глаз»
Системами технического зрения (СТЗ) являются сенсорные устройства, обеспечивающие получение изображений рабочих сцен и объектов, их преобразование, обработку и интерпретацию с помощью ЭВМ, а также передачу результатов управляющему устройству предложенного робота.
Робот-интроскоп ориентируется благодаря оптической системе из двух камер (Рис.5), что обеспечивает стереоскопический эффект и позволяет определить расстояние до объекта. Кроме того, у робота есть шесть датчиков, расположенных по периметру в горизонтальной плоскости. Они позволяют ему экстренноостановиться при угрозе столкновения с каким-нибудь объектом.

Рис. 5. Расположение камер
В представленной работе был разработан робот-интроскоп, выполняющий функции проводника, рассчитаны параметры и рабочие характеристики робота.
Данный робот снижает риски терактов, что является его основным преимуществом, а также обеспечивает безопасность пассажиров поездов. Также стоит отметить мобильность гуманоида на железнодорожной станции.
Исследуемый объект заменяет человека на монотонной и тяжелой работе, помогает экономить материалы и энергию.
В результате проведенной работы была достигнута поставленная цель и реализованы задачи.
Литература:
- Поезжаева Е. В.// Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева.- Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2.-185
- Поезжаева Е. В., Новикова А. А., Поликарпова К. Н., Сайкинова В. А., Роботизация для обеспечения комфорта в промышленных и в бытовых помещениях. // Молодой ученый. — 2016. № 2 (106).
