




В данной работе рассматривается управляемый объект, который необходимо перевести в начало координат с заданным в конечный момент времени значением скорости и курсового угла за минимальное время. Движение объекта описывается системой обыкновенных нелинейных дифференциальных уравнений четвертого порядка. Предполагается, что оптимальное управление и оптимальная траектория движения существуют. Исследование основывается на принципе максимума и не рассматривается случай нулевого управления. Полученj свойство, сформулированное в виде леммы.
Ключевые слова: принцип максимума, гамильтониан, сопряженная система, курсовой угол
В современном мире люди каждый день управляют той или иной техникой или процессами. И так как прогресс не стоит на месте, то каждый день появляются новейшие объекты, которые требуют нахождения различных подходов к управлению ими. Поэтому вопрос управления сегодня весьма актуален. А так как люди не любят тратить свои усилия и ресурсы впустую, то они хотят управлять всем оптимально. Данная проблема возникла уже очень давно и так как решение этой задачи далеко не всегда было тривиальным, то изобрели соответствующую математическую теорию, которая получила название «теория оптимальных процессов». Важнейшую роль в ней сыграл Л. С. Понтрягин, который сформулировал в 1958 году всем известный принцип максимума. Позднее принцип доказали Р. В. Гамкрелидзе и В. Г. Болтянский в частном и общем случаях соответственно.
В жизни, мы стараемся закончить начатые дела, как можно раньше, поэтому на практике часто показателям качества решения является время, то есть мы хотим решить задачу быстродействия. Как известно, в случае линейных систем обыкновенных дифференциальных уравнений принцип максимума обеспечивает необходимые и достаточные условия для оптимальности решения. Однако же, когда возникает нелинейность, то прибегают к линеаризации, которая дает весьма хорошие результаты, но далеко не всегда. В таких случаях приходится прибегать к дополнительным исследованиям, опирающимся на вид и свойства конкретной нелинейной системы, благодаря которым иногда удается получить число точек переключения управления. В данной статье, приводится пример такого исследования. Нелинейная система обыкновенных дифференциальных уравнений описывает физическую задачу захода самолета при сильном боковом ветре на палубу авианесущего корабля или сближения двух самолетов для дозаправки, то есть задачу стыковки.
Математическая модель в данном случае выглядит следующим образом:
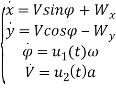 (1)
(1)
Здесь ![]() и
и ![]() — геометрические координаты объекта,
— геометрические координаты объекта, ![]() — скорость,
— скорость, ![]() — курсовой угол, отсчитываемый от положительного направления оси ординат до вектора скорости
— курсовой угол, отсчитываемый от положительного направления оси ординат до вектора скорости ![]() по часовой стрелке и удовлетворяет ограничению
по часовой стрелке и удовлетворяет ограничению ![]() .
.
Необходимо перевести объект из начальной точки (![]() в заданную область
в заданную область ![]() , где T — конечный момент времени. Функционалом качества служит конечное время, следовательно, нам требуется решить задачу оптимального быстродействия. Также на систему накладываются следующие ограничения: управляющая вектор-функция
, где T — конечный момент времени. Функционалом качества служит конечное время, следовательно, нам требуется решить задачу оптимального быстродействия. Также на систему накладываются следующие ограничения: управляющая вектор-функция ![]() выбирается из класса кусочно-непрерывных функций, должна удовлетворять ограничениям
выбирается из класса кусочно-непрерывных функций, должна удовлетворять ограничениям ![]() ,
, ![]() и при этом не рассматривается ситуация, когда управление равно нулю, скорость объекта
и при этом не рассматривается ситуация, когда управление равно нулю, скорость объекта ![]() , где
, где ![]() . Последнее равенство означает, что объект может совершить полный разворот, двигаясь равноускорено при начальной скорости. Остальные параметры являются постоянными:
. Последнее равенство означает, что объект может совершить полный разворот, двигаясь равноускорено при начальной скорости. Остальные параметры являются постоянными: ![]() — ускорение,
— ускорение, ![]() — угловая скорость,
— угловая скорость, ![]() и
и ![]() — возмущения не равны нулю одновременно.
— возмущения не равны нулю одновременно.
Данная задача была неоднократно рассмотрена в несколько иных постановках. Так, например, поставил задачу в игровой постановке (игра «шофер-убийца») Р.Айзекс в работах [1,2]. Множество вариантов и модификаций игры «шофер-убийца», а также различные алгоритмы для ее решения и численные методы, описаны в [3,4]. Принципиальное отличие задачи в данной работе заключается в задании значений в конечный момент времени курсового угла и скорости, а также в наличии ограничений на них.
В нашем случае гамильтониан системы имеет вид:
![]()
![]()
Сопряженная (1) система имеет следующий вид:
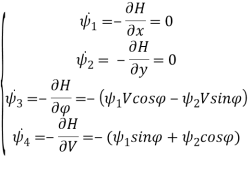 (2)
(2)
Согласно принципу максимума [5], оптимальное управление имеет вид:
![]()
![]()
Покажем, что имеет место следующая лемма.
Лемма. Пусть в задаче (1) для траектории удовлетворяющей принципу максимума существует три идущие подряд точки переключения управления ![]() , причем
, причем ![]() — является и точкой переключения управления
— является и точкой переключения управления ![]() Тогда
Тогда ![]()
Доказательство. Для начала проинтегрируем первые два уравнения из (1) на интервале ![]() постоянства управлений
постоянства управлений ![]() и
и ![]() :
:
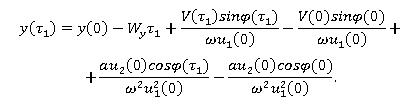 (4)
(4)
Для упрощения записи введем обозначение:
![]()
Также проинтегрируем третье уравнение из сопряженной системы (2):
![]()
![]()
Используя последнее соотношение, имеем:
![]() (*)
(*)
Воспользуемся тем, что гамильтониан как функция времени на оптимальной траектории постоянен, то есть: ![]()
![]() [5]. Рассмотрим моменты
[5]. Рассмотрим моменты ![]() и
и ![]() :
:
![]()
![]()
С учетом равенства (*), получим:
![]()
![]()
![]()
![]()
![]()
![]()
Домножим последнее равенство слева и справа на ![]() :
:
![]()
Откуда придем к следующему выражению:



Отсюда следует:

где ![]() Из последнего равенства вытекают два варианта. Если первый сомножитель равен нулю, то
Из последнего равенства вытекают два варианта. Если первый сомножитель равен нулю, то ![]()
![]() но этот случай невозможен, так как будет нарушено ограничение, накладываемое на курсовой угол, при этом ни момент
но этот случай невозможен, так как будет нарушено ограничение, накладываемое на курсовой угол, при этом ни момент ![]() , ни момент
, ни момент ![]() не являются точками переключения управления
не являются точками переключения управления ![]() . Если же второй сомножитель равен нулю, то
. Если же второй сомножитель равен нулю, то ![]() . Аналогично:
. Аналогично:
![]()
откуда следует, что
![]()
В последнем соотношении возможны 3 варианта: первый — ![]() , второй —
, второй — ![]() , третий —
, третий — ![]() . Докажем, что возможен только 3-ий вариант. Пусть
. Докажем, что возможен только 3-ий вариант. Пусть ![]() , а тогда
, а тогда ![]() и
и ![]() . Рассмотрим первый вариант
. Рассмотрим первый вариант ![]() , соответственно
, соответственно![]() , а это нарушает ограничение, накладываемое на угол. Если взять второй вариант, получим подобное нарушение ограничения
, а это нарушает ограничение, накладываемое на угол. Если взять второй вариант, получим подобное нарушение ограничения ![]() , следовательно,
, следовательно,![]() . А 3-ий случай не нарушает никаких ограничений. Если же
. А 3-ий случай не нарушает никаких ограничений. Если же ![]() тогда
тогда ![]() этом случае аналогичным образом получим:
этом случае аналогичным образом получим:
1)
2) ![]() ,
,
3) ![]() .
.
Здесь видно, что только третий вариант не нарушает ограничений на угол. Таким образом, показали, что углы в момент ![]() и
и ![]() равны. Лемма доказана.
равны. Лемма доказана.
Литература:
- Айзекс Р. Дифференциальные игры / пер. с англ. В. И. Аркина, Э. Н. Симаковой; под ред. М. И. Зеликина. М.: Мир, 1967, 384 с. (Isaacs R. Differential games.)
- Isaacs R. Games of pursuit. Scientific report of the RAND Corporation. SantaMonica: RANDCorporation, 1951. 00 p.
- Пацко В. С., Турова В. Л. Игра «шофер-убийца» и ее модификации // Вестник Удмурт.у-та. Вып. 2. Ижевск 2008.С. 105–110.
- Patsko V. S., Turova V. L. Level sets of the value function in differential games with the homicidal chauffeur dynamics // Game Theory and Applications. 2007. Vol. 12. P. 123–152.
- Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных процессов., М.: Наука, 1969. 384 с.
