Анализ взаимодействия элементов любого рабочего органа с материалом позволяет изучить физическую сущность возникновения сопротивлений, на преодоление которых приходится тратить определенный запас энергии. Сопротивление отделение слоя вороха с пальцевым рабочим органом, как и любым другим ротационным органом, является функцией многих переменных, характеризующих физико-механические свойства материала, геометрические размеры отделяемого слоя, кинематические и конструктивные параметры пальцев [1].
В соответствии с теорией фрезерных и других ротационных рабочих органов почвообрабатывающих машин, созданной трудами В. П. Горячкина, В. А. Желиговского, В. А. Яцука и др. применительно к пальцевому рабочему органу сила сопротивления на отделение им слоя вороха может быть представлена в виде суммы следующих слагаемых (рис.1).
- Сила сопротивления внедрению пальцев в ворох Рвн.
- Сила сопротивления отрывку слоя вороха от монолите Ратр.
- Сила сопротивления на преодоление трения Рсg.
- Сила сопротивления со стороны инерционных сил Рин.
Тогда сила общего сопротивления будет равна (рис.1)
![]() (1)
(1)
Определим аналитически величину и направление составляющих выражения (1).
Сила сопротивления внедрению элементов рабочего органа загрузчика в ворох состоит из силы сопротивления внедрению конической части пальца Ркон. и силы трения вороха об его цилиндрическую боковую поверхность Ртр.
Тогда ![]() (2)
(2)
где ![]() - число пальцев, одновременно внедряющихся в материал.
- число пальцев, одновременно внедряющихся в материал.
Для определения составляющих зависимости (2) рассмотрим силы, действующие на палец (рис.2).
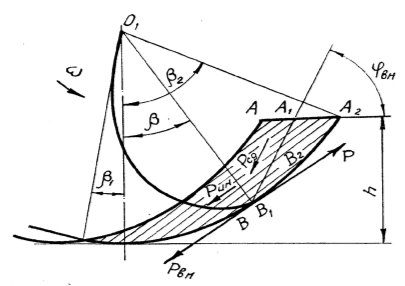
Рис. 1. Схема к определению силы сопротивления отделения слоя вороха
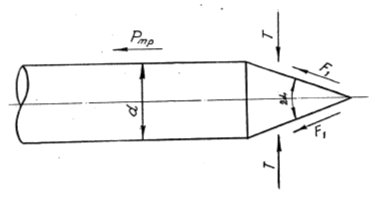
Рис. 2. Схема сил, действующих на рабочий элемент
Сила сопротивления внедрению конической части пальца состоит на сопротивления вдавливанию Т и силы сопротивления от трепния конической части пальца о ворох Fкон.
![]() (3)
(3)
где ![]() ,(4)
,(4)
а ![]() (5)
(5)
σ0 — удельное сопротивление вдавливанию конической части пальца в ворох, равное несущей способности монолита;
S1 — площадь поверхности конической части пальца, м2;
![]() – угол между образующей и осью симметрии пальца, град;
– угол между образующей и осью симметрии пальца, град;
f — коэффициент трения вороха по стали.
Площадь поверхности конической части пальца может быть определена из выражения
 (6)
(6)
где d — диаметр пальца, м.
Учитывая зависимость (6), выражение (3) после соответствующих преобразований будет иметь вид
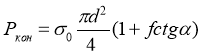 (7)
(7)
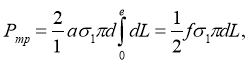
Силу трения вороха о цилиндрическую поверхность пальца можно определить следующим образом:
 (8)
(8)
где ![]() — коэффициент учитывающий то обстоятельство, что палец имеет криволинейный профиль, позволяющий исключить трение между его затылочной частью оставшимся ворохом в бункере;
— коэффициент учитывающий то обстоятельство, что палец имеет криволинейный профиль, позволяющий исключить трение между его затылочной частью оставшимся ворохом в бункере;
σ1 — удельное нормальное давление со стороны слоя вороха на пальцы рабочего органа
L — длина дуги траектории движения конца пальца, по которой происходит контакт слоя вороха с пальцами, изменяющейся от 0 до L м.
Учитывая, что ворох семенников относится к сыпучим несвязанным материалам, у которых отсутствует явление остаточности напряженного состояния, объясняемое действия межмолекулярных сил сцепления между частицами, σ1 можно определить как сумму сил от массы вороха и инерционных сил, действующих на единицу поверхности, по которой происходит отделение слоя.
Тогда
 (9)
(9)
где ![]() — объемная масса вороха, кг/м3:
— объемная масса вороха, кг/м3:
![]() - объем слоя вороха, отделяемого одним рядом пальцев рабочего органа, м3;
- объем слоя вороха, отделяемого одним рядом пальцев рабочего органа, м3;
![]() — площадь поверхности, по которой происходит деформация слоя;
— площадь поверхности, по которой происходит деформация слоя;
![]() — угол поворота рабочего органа от вертикального положения, град.
— угол поворота рабочего органа от вертикального положения, град.
![]() - центробежная сила инерции, н;
- центробежная сила инерции, н;
![]() - радиус окружности, по которой вращается конец пальца, м;
- радиус окружности, по которой вращается конец пальца, м;
![]() — частота вращения рабочего органа, с-1;
— частота вращения рабочего органа, с-1;
![]() — масса отделяемого слоя вороха.
— масса отделяемого слоя вороха.
Сила сопротивления сдвигу вороха при внедрения пальцев может быть определена как
![]() (10)
(10)
где ![]() — площадь сечения слоя, расположенного под углом трения, м2;
— площадь сечения слоя, расположенного под углом трения, м2;
![]() - внутренний коэффицент трения вороха.
- внутренний коэффицент трения вороха.
Угол внутреннего трения может быть определен по общепринятой зависимости
![]() (11)
(11)
Учитывая необходимость расчета наибольшего значения силы сопротивления отделению слоя от массы в бункере загрузчика, в зависимость (10) подставляем максимально возможное значение площади поверхности сдвиге.
Анализ зависимостей (8), (9) и (10) позволяет установить, что в эти зависимости входят длина дуги траектории движения конца пальцевого элемента, по которой отделяется слой вороха от массы в бункере загрузчика, объем и площадь поверхности слоя, отделяемого одним рядом пальцев, а также площадь сечения слоя под углом трения вороха по вороху. Эта величина могут быть определены на основе специальных исследований геометрии отделения слоя вороха от остальной его массы [2].
Литература:
- Горячкин В. П. Собрание сочинений. В 3-х томах. — М.: Колос, 1965. Т.-1, 702 с.
- Дозирование слоя вороха клевера в конвейерные сушилки и обоснование параметров загрузчика. Диссертация на соискание ученой степени канд.техн.наук. Горки, 1988.

