




При автоматизации и роботизации производства приходится определять возможность перемещения в пространстве предметов при наличии различных ограничений и решать проблему оптимальногоперемещении предметов.
Рука робота состоит из п отрезков прямых, т. е. звеньев произвольной конечной длины каждое, движущихся в евклидовой плоскости (рисунок 1).На рисунке 1 обозначено: 1 — плечо; 2 — шарнирные углы; 3 — кисть. По всей длине руки эти звенья соединены поворотными шарнирами. Один конец руки (плечо) зафиксирован, но может свободно вращаться. Другой конец руки (кисть) полностью свободен.
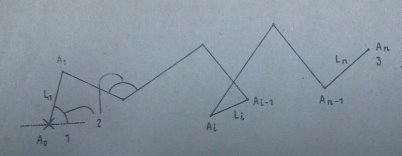
Рис. 1.
Все шарнирные связи, включая плечо и кисть, обозначены А0,А1,…,Аn. Звено между Аi-1 и Ai обозначается Li, а его длина li. Шарнирный угол между Аi, i>0 — это угол между звеньями Li и Li+1, а угол А0 — это угол звена L1 с горизонталью. Каждый шарнир все время должен находиться в пределах окружности С с центром О и радиусом r. Конфигурация руки задается положениями всех ее соединений. Переход от данной начальной конфигурации Г0 к конечной конфигурации Гf возможен в том случае, если траектория перемещения руки в Гf позволяет всем шарнирным углам изменяться с произвольными независимыми скоростями.
Рука имеет нормальную форму, если каждое соединение находится как можно ближе к С (рисунок 2). Часть руки от ![]() до
до ![]() называется “конечностью” шарнира Аi. Эта конечность имеет нормальную форму, если нормальную форму имеет часть руки Ai,…,Аn.Звено Liимеет левую или правую ориентацию, если центр окружности С лежит слева или справа от линии Ai — Ai-1.Если Li лежит на любом диаметре окружности, то звено Li имеет обе (левую и правую) ориентации. Переориентирование звена Li означает такое перемещение руки, при котором звено начинает менять свою существующую в данный момент ориентацию. Другими словами, переориентирование Li означает перемещение руги к такой конфигурации, при которой звено оказывается на диаметре окружности.
называется “конечностью” шарнира Аi. Эта конечность имеет нормальную форму, если нормальную форму имеет часть руки Ai,…,Аn.Звено Liимеет левую или правую ориентацию, если центр окружности С лежит слева или справа от линии Ai — Ai-1.Если Li лежит на любом диаметре окружности, то звено Li имеет обе (левую и правую) ориентации. Переориентирование звена Li означает такое перемещение руки, при котором звено начинает менять свою существующую в данный момент ориентацию. Другими словами, переориентирование Li означает перемещение руги к такой конфигурации, при которой звено оказывается на диаметре окружности.
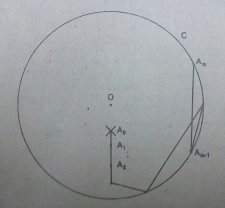
Рис. 2.
Величины сi и di означают минимальное и максимальное расстояние от С, на которых может находиться Аi.
Общий метод быстрой реконфигурации руки может позволить произвести групповое, а не индивидуальное переориентирование звеньев, у которых отличаются ориентации Г0 и Гf. Можно допустить, что А0 не лежит в центре О окружности, так как, если бы А0 находилось в центре, то реконфигурацию руки можно было бы начать с вращения относительно А0, пока А1 не займет своего предельного положения. Следовательно, конечность Аi может рассматриваться как рука робота с (n-1) звеном, изменяющая конфигурацию от плеча А1, не лежащего в центре.
Алгоритм перемещения руки в пределах окружности из конфигурации Г0 в достижимую конфигурацию Гf состоит из трех шагов.
Шаг 1. Привести руку Г0 к нормальному виду. Рассчитать последовательность перемещений, необходимых для достижения нормальной формы.
Шаг 2. Переместить руку Гn в Гn’.
Шаг 3. Используя обратную последовательность перемещений, необходимых для перехода из Гf в Гn, переместить руку в Гf.
Пусть ƶ={L1}, ориентация Liв Гn и Гn’ отличаются друг от друга. Один способ изменения Гn наГn’ заключается в перекосе каждого звена в ƶ на диаметр и в изменении ориентации обратной последовательности перемещений. Это может потребовать О(n) перемещений для каждого звена в ƶ, приводя в результате к О(n2) перемещениям. Этот результат был улучшен путем расчета подмножества ƶ так, что когда звенья этого подмножества переносятся к некоторым диаметрам, то каждый элемент из ƶ подходит к диаметру по крайней мере один раз, но не более двух раз.
Исследование переноса звена Liиз любого подмножества ƶ к диаметру окружности позволило установить, что для любого Li из ƶ существуют такие числа хi-1 и хi, при которых соблюдаются условия:
1) сi-1≤xi-1≤di-1, ci≤xi≤di;
2) 2r-xi-1-xi=liили |xi-1-xi|=li.
Всякий раз, когда шарниры Аi-1 и Aiнаходятся на расстоянии соответственно xi-1 и xi от центра окружности С, то Liдолжно лежать на диаметре.
Можно сказать, что каждый шарнир будет находиться от С на расстоянии между сi и di включительно. Когда шарниры оказываются на таких расстояниях от С, несколько шарниров, смежных с Li, будут находиться на диаметре (рисунок 3). Звенья с меньшим значением индекса называются передним покрытием (Fi), а с большим значением индекса — задним покрытием (Вi). К заднему покрытию для Li могут быть отнесены звенья, которые лежат на диаметре, когда конечность от Ai имеет нормальную форму.
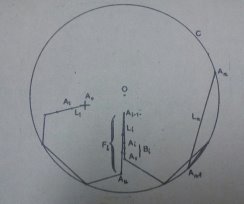
Рис. 3.
Перемещение руки к конфигурации Гd, соответствующей положению Аi-1 в xi-1 и Ai в xi,начинается от конфигурации Гn. Пусть Аu обозначает шарнир с наименьшим индексом в Fi, а Аv — шарнир с наибольшим индексом в Вi. Шарнир Аu может поворачиваться относительно фиксированного Аu-1, пока не окажется на расстоянии ![]() i(Au) от С, удерживая конечность от Аu все время в нормальной форме (рисунок 4). Следующее движение произойдет, когда шарнир отойдет от окружности С. Поскольку расстояние между Аu и С монотонно возрастает, то каждый шарнир отходит от С только один раз. Во время каждого движения одновременно перемещаются не более четырех звеньев. На рисунке 4, например, перемещаются только помеченные точки.
i(Au) от С, удерживая конечность от Аu все время в нормальной форме (рисунок 4). Следующее движение произойдет, когда шарнир отойдет от окружности С. Поскольку расстояние между Аu и С монотонно возрастает, то каждый шарнир отходит от С только один раз. Во время каждого движения одновременно перемещаются не более четырех звеньев. На рисунке 4, например, перемещаются только помеченные точки.
Затем аналогично, как для Аu, происходит поворот в шарнирах Аu+1,…, Аi. По окончании этой процедуры шарнир в заднем покрытии автоматически оказываются на требуемых расстояниях, так как конечность для Аi удерживалась в нормальной форме. Поскольку в требуемые позиции могут поворачиваться только | Fi|+1 шарниров и только | Fi|+| Вi|+2 шарниров отходят за все время движения от С, можно сделать вывод, что необходимо только О(| Fi|+| Вi|+1) движений и столько же этапов вычислений.
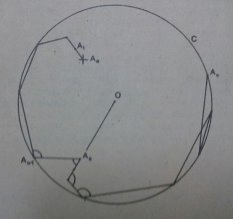
Рис. 4.
Вернем теперь руку к нормальной форме, в которой Li и звенья в покрытиях ориентированы как в Гn‘. Не имеет значения, что звенья в {Li}UFi Вi располагаются на диаметре: можно подобрать подходящую модификацию, которая обратна последовательности перемещений, использованных для приведения Li к диаметру.
Единственной проблемой для реверсирования является возможность нахождения Аi-1 или Аi в центре О для конфигурации Гd. Для упрощения предположим, что это Ai (рисунок 5) и li+1 ≤ r. Тогда необходимо Ai повернуть относительно Ai-1 в направлении, противоположном тому, из которого Ai пришло. Чтобы это осуществить, сначала Ai фиксируется в О, а затем конечность для Ai, сохраняя жесткость, поворачивается на 180°.
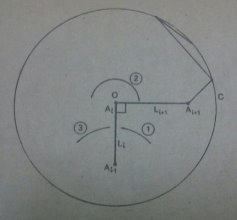
Рис. 5.
Предположим теперь, что во время О(n) вычисляется подмножество ƶ* множества ƶ так, что каждый элемент из ƶ принадлежит ƶ* либо находится в переднем или заднем покрытии элемента из ƶ*, но никогда не находится в двух передних или задних покрытиях. Используя описанную выше процедуру, каждый элемент из ƶ* приводится к диаметру и достигается конфигурация Гn’. Общее число перемещений и общее время вычислений равны ∑ik(| Fi|+| Вi|+1) каждое, де k — это некоторая константа, суммирование проводится по индексам элементов ƶ*. Эта сумма равна О(n).
Поскольку Шаги 1 и 3 также требуют О(n) перемещений и О(n) времени вычислений, на полную реконфигурацию руки потребуется только О(n) перемещений и О(n) времени вычислений.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч. — Пермь: Изд-во Перм. гос. тех. ун-та,2009. — Ч. 2. — 185 с. 2.
- Козырев Ю. Г. Применение промышленных роботов. Изд-во М.: КноРус, 2011.
