




Рассматриваются вопросы организации планирования работ в условиях гибких производственных систем (ГПС), когда во внимание должны приниматься как мультипроцессная исполнительная среда, так и динамическое изменение состояния отдельных подсистем ГПС.
В общем случае в результате работы подсистемы планирования формируется последовательность действий («план»), выполнение которой исполнительными процессорными элементами приводит к достижению желаемых целей. Задача подсистемы планирования заключается, в частности, в том, чтобы сгенерированный план привел бы к реализации согласованных действий всех исполнительных подсистем ГПС (станков с ЧПУ, роботов, управляющих ЭВМ и т. д.). Указанная задача должна решаться при условиях, обеспечивающих максимально эффективное выполнение производственных операций в конкретной ГПС (распараллеливание операций, повышение коэффициента использования оборудования и т. д.); минимизацию времени, необходимого как для выполнения отдельных технологических операций, так и для изготовления готового изделия; возможность рассмотрения альтернативных вариантов плана и его пересмотра при выявлении «узких мест».
Подобно ГПС гибкая производственная ячейка представляет собой относительно замкнутый модуль интегрированной автоматизированной производственной системы. Задача планирования на уровне такой ячейки может быть сформулирована следующим образом:
Предполагается, что задано общее число деталей, которые должны быть обработаны в данной ячейке, содержащей фиксированное число обрабатывающих машин. Каждая деталь требует для своей обработки выполнения определенной последовательности операций. Так как эффективность реализации отдельных операций различными машинами различна, то для каждой детали выбирается маршрут, обеспечивающий в каждый момент возможность ее обработки на максимальном числе свободных машин. Целью планирования является составление одновременно реализуемых маршрутов движения всех N деталей при условиях минимизации времени завершения всех требуемых операций и отсутствия конфликтов, связанных с назначением двух деталей для обработки на одну машину.
Проблема упорядочения в условиях гибкой производственной ячейки характеризуется следующим:
1) отдельные работы состоят из линейно упорядоченных последовательностей операций;
2) любая операция может выполняться несколькими машинами, но с различными значениями интервала времени выполнения;
3) любая машина в каждый момент времени может выполнять только одну операцию.
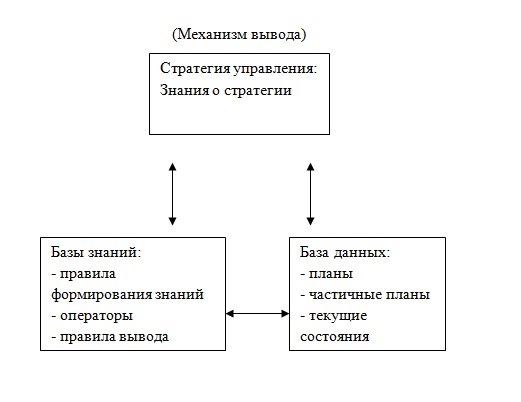
Использование при планировании базы знаний связано с выделением трех информационных уровней: данных, базы знаний и управления (в известных системах традиционного типа выделяются два уровня — данных и программ.
На уровне данных хранятся декларативные знания о целях, текущем состоянии окружающей среды и промежуточном плане. На уровне базы знаний — информация, специфицирующая конкретную прикладную область. Используемые знания позволяют моделировать действия «внешнего мира». На уровне управления хранятся знания о стратегии, используемой при формировании планов действий (то есть о том, когда и как применять конкретные действия-операторы).
В любой задаче планирования начальные условия, определяющие исходное состояние системы, и условия, характеризующие конечную цель, рассматриваются как определенные состояния (элементы) модели «внешнего мира». В соответствии с этим система планирования формирует последовательность действий, переводящих модель из начального состояния в состояние, отвечающее целевым условиям. На рисунке показаны три основные компонента системы планирования ГПС:
На рисунке представлены:
1) модель мира, описываемая набором предикатов 1-го порядка хранящихся в базе данных. Элементы этой базы называются состояниями модели мира.
2) модель действий, описывающая изменение состояния модели мира при выполнении определенных действий. Преобразования состояний задаются операторами. Оператор содержит в себе определения: имени действия, предусловия, список добавлений, список удалений, ресурс и длительность.
3) ядро системы вывода, являющееся генератором планов, осуществляет выбор последовательности операторов, обеспечивающих переход из начального состояния в целевое.
Отмечается, что линейные планы могут генерироваться любой системой, в которой используется метод обратного просмотра, обеспечивающий движение от цели к начальным условиям с выбором соответствующих промежуточных состояний и последовательностей действий, отвечающих таким переходам. В этом случае процесс генерации плана может рассматриваться как поиск пути от корня (цели) к листьям (начальным условиям) на дереве состояний модели мира.
Поскольку в случае реальных производственных процессов существует зависимость между задачами обработки отдельных деталей, то система планирования должна учитывать эту зависимость при составлении эффективного плана (то есть плана, не приводящего к конфликтам при использовании отдельных ресурсов в ходе производственного цикла ГПС). В этом случае обычно осуществляется «нелинейное планирование», при котором генерируемые планы оказываются частично упорядоченными.
Схема составления нелинейного плана для гибкой ячейки включает следующие шаги:
- Формирование линейно упорядоченного плана (последовательности шагов) для выполнения каждой задачи.
- Выявление существенных (для процесса выполнения задач) связей между запланированными шагами.
- Устранение конфликтов путем учета ограничений предшествования на порядок следования отдельных шагов.
- Выявление альтернативных шагов планирования, позволяющих улучшить показатели производительности системы.
Предлагаемый механизм обладает рядом особенностей, позволяющих считать его весьма полезным при составлении и контроле планов в условиях ГПС: во-первых, его работа непосредственно определяется целью, сформулированной пользователем; во-вторых, его работа может корректироваться динамически (в частности, допустимо изменение плана при возникновении непредвиденных событий и т. д.).
Предложен алгоритм, предназначенный для формирования планов по разработанному методу, с динамическим выявлением отношений предшествования между любыми конфликтными действиями. В качестве основного принципа работы алгоритма принят следующий: ограничения предшествования должны вводиться только тогда, когда это абсолютно необходимо. Это позволяет обеспечить максимальный параллелизм при реализации операций, относящихся к выполнению отдельных задач. В статье приведена блок-схема алгоритма.
В качестве четвертого шага разработанного метода применяется стратегия, включающая следующие этапы:
- Выявление ресурса, который необходим рассматриваемой работе (задаче) для ее успешного выполнения.
- Локализация раздела плана, в котором используется найденный ресурс.
- Сравнение времени ожидания данного ресурса при выполнении задачи на рассматриваемой машине с дополнительным временем обработки при передаче задачи на альтернативную пустующую машину.
- Нахождение начального и конечного (целевого) условий выполнения найденного раздела плана.
- Генерация плана, обеспечивающего преобразование найденных начальных условий в целевые путем использования имеющегося свободного ресурса (машины).
- Замена выделенного раздела исходного плана на план, найденный в пункте 5.
Если все работы упорядочены в соответствии со своими приоритетами, то список событий должен рассматриваться как очередь с приоритетами. При этом в каждый момент времени любому запланированному действию соответствует целое число, равное приоритету работы, к выполнению которой относится это действие. В этом случае (при прочих равных условиях) свободный ресурс всегда назначается работе (действию) с наивысшим приоритетом. Сами приоритеты либо назначаются заранее, либо определяются в зависимости от условий выполнения работ (в частности, приоритет работы может определяться срочностью ее исполнения, соответствием расчетного времени окончания работы времени, требуемому при постановке задачи и т. д.).
В ГПС работы поступают в каждую ячейку динамически. Отмечается что в этом случае предложенный подход, основанный на использовании базы знаний, работает лучше всего. Это объясняется структурностью используемых представлений знаний о модели «внешнего мира»; возможностью разрешения конфликтов в процессе автоматического вывода плана. Все изменения в системе находят соответствующее отражение в базе знаний. В частности, поступление новых работ приводит к инициации следующих процедур;
- Формирование планов выполнения новых работ с учетом работ и машин, имеющихся в текущий момент.
- Использование схемы разрешения конфликтов для согласования действий, требуемых для выполнения новых работ, и действий для оставшихся неоконченными старых работ.
- Улучшение модифицированного плана с помощью стратегии «пересмотра плана».
Динамический контроль плана является одним из основных преимуществ предложенного подхода.
Интегрированные автоматизированные производственные система содержат набор гибких производственных ячеек, каждая из которых выполняет определенные функции обработки. Описанные в данной работе механизмы планирования реализуются в каждой ячейке с помощью главной управляющей ЭВМ этой ячейки. Для интегрированной системы приведенные механизмы составляют второй уровень общей системы планирования. Первый уровень связан с планированием и распределением работ по отдельным ячейкам с учетом индивидуальных особенностей отдельных ячеек.
Представляется возможным создание единой системы планирования работ в интегрированных производственных системах на основе использования локальных вычислительных сетей и распределенных баз данных и знаний.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч. — Пермь: Изд-во Перм. гос. тех. ун-та,2009. — Ч. 2. — 185 с. 2.
- Поезжаева Е. В., Васенин А. С., Шумков А. Г. Роботизация фермерских хозяйств по обработке растений / Е. В. Поезжаева, А. С. Васенин, А. Г. Шумков // Научно-технический журнал «Вестник» ВСГУТУ. — 2014 — Вып. 3 — С. 59–62
