В настоящее время стоит вопрос о продаже качественной и годной бытовой химии. В связи с этим разработан робот, позволяющий определить срок годности, химический состав бытовой химии и ее соответствие ГОСТам.
Ключевые слова: робот, анализ химического состава, контроль качества.
Вся бытовая химия имеет ограниченный срок годности. А потому на практике нередко возникают ситуации, когда на складе предприятия, оказываются нереализованная бытовая химия, срок годности которой истек. Такой товар нельзя продавать или использовать — его нужно списать и уничтожить. Нередки случаи, когда просроченная бытовая химия попадает в розничную продажу, что предприниматели или организации не желают нести убытки путем уничтожения недоброкачественной бытовой химии, что противоречит п.1 ст.31 закона № 86-ФЗ.
Решим данную проблему определением срока годности, химического состава бытовых средств и их соответствием ГОСТам. Для этого используем робота, который будет проверять товар на годность. Если данный товар проходит эту проверку, то он переходит к определению химического состава и сверке его с собственной базой данных государственных стандартов для бытовых средств. Если товар просрочен или его состав не соответствует ГОСТу, то его упаковка подлежит повреждению с целью предотвращения реализации.
Аналогом робота будет служить летающий робот-пчела фирмы Monsanto, уникальность нашей разработки в том, что она будет оснащена устройством-сканером между передними и средними парами лапок, использующим луч близкий к инфракрасному диапазону, который позволяет определить состав без физического контакта с ними. Пара передних лапок пчелы будут представлены в виде толстых игл с целью повреждения упаковки, средние и задние пары лапок — схватами для взятия упаковок [1].

Рис. 1. Летающий робот-пчела
Так же робот будет оснащен системой технического зрения, расположенной на месте глаз пчелы, для распознавания объектов и определения их положения и ориентации в пространстве. Данная задача будет решена зрительной системой ДКНО (движущаяся камера, неподвижные объекты). Общий подход состоит в том, чтобы отдельно определить расстояние от точки наблюдения до объекта и ориентацию камеры, хотя они не являются полностью независимыми друг от друга. Этот подход оказывается работоспособным потому, что расстояние в основном связано с размером изображения объекта или признака, тогда как направление наблюдения, главным образом, связано с выбором точки наблюдения, с которой виден требуемый признак без окклюзии. При таком разделении задача во многих случаях упрощается. Далее рассмотрим методы раздельного определения расстояния и ориентации камеры.
Первым определяемым параметром очередного положения камеры является ее расстояние до объекта. Это расстояние выбирается из тех соображений, чтобы интересующая особенность объекта была хорошо видна. Желательно минимизировать количество видов, покрывающих всю поверхность объекта. В таблице 1 показано соотношение между количеством видов и требуемым расстоянием от камеры до объекта для простейшего случая, когда объектом является сфера.
Таблица 1
|
Количество видов |
требуемое |
|
|
|
|
2,3 |
90 |
невозможно |
|
- |
|
4 |
70.53 |
12.4 |
3.0 |
4.13 |
|
5 |
63.44 |
4.82 |
2.24 |
2.16 |
|
6 |
54.74 |
2.79 |
1.73 |
1.61 |
Смысл параметров проиллюстрирован на рис. 2, где обозначено: 1 -фокальная плоскость; 2 — видимая область. Для более сложных объектов примерное расстояние можно определить, используя понятие объемлющей сферы. Такой подход хорошо работает на не слишком вытянутых объектах.
Далее рассчитывается ориентация камеры с использованием модели объекта и имеющейся грубой информации о его ориентации в пространстве. В случае, когда препятствия отсутствуют, задача, упрощается и сводится к отысканию направления, с которого видна интересующая особенность объекта. Общий алгоритм определения направления выглядит следующим образом: 1.Выделить неисследованную область признаковой поверхности; 2. Представить ее в соответствии с выбранным методом; 3.Учесть препятствия между объектом и камерой (если таковые имеются); 4.Выбрать наиболее незагороженную область около интересующей точки или требуемого угла, содержащую признак; 5.Проверить правильность выбора точки наблюдения с использованием метода невидимых поверхностей. При наличии ГВ искомое направление может определяться следующим образом. Прежде всего, выделяются узлы ГВ, отвечающие видам, на которых интересующий признак виден достаточно хорошо. Затем из них выбирается наилучший. При этом может учитываться наличие препятствий. Абсолютная ориентация камеры получается в результате использования имеющейся информации об ориентации объекта. Однако при наличии многих загораживающих объектов более перспективным методом отыскания наилучшего направления наблюдения представляется предлагаемый метод проекций. Он состоит в том, чтобы спроектировать невидимую часть признаковой поверхности на сферический или цилиндрический "экран". Радиус этого экрана определяется требуемым расстоянием от камеры до объекта, центр совпадает с центром объекта, а высота цилиндрического экрана определяется высотой модели. Выбор между сферическим и цилиндрическим экранами делается в зависимости от формы объекта. Следующим этапом является проектирование загораживающих объектов, расположенных между анализируемым объектом и экраном. При этом учитываются только те загораживающие объекты, проекция которых перекрывается с проекцией интересующего участка поверхности анализируемого объекта [2].
Имеются два метода проектирования — эклиптический и точечный. Эти методы проиллюстрированы на рис.3. Эклиптический метод дает более точное описание в том смысле, что он позволяет различать полностью и не полностью закрытые объекты. Недостатком его является вычислительная сложность». Точечный метод значительно проще и при этом дает относительно неплохие результаты.
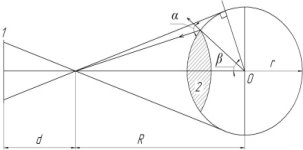
Рис. 2.Параметры положения камеры
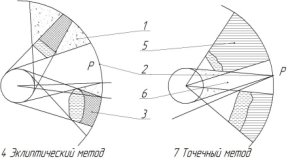
Рис. 3. Методы проектирования загораживающих объектов
Выбор метода проектирования осуществляется самим роботом. Система является быстродействующей. Сигнал с телекамеры после порогового устройства передается на микропроцессор. В пороговом устройстве устанавливаются два порога. С помощью этих порогов выделяется необходимый интервал амплитуд входного сигнала. Вся обработка изображений осуществляется с помощью микропроцессора.
Литература:
- Поезжаева Е.В// Промышленные роботы: учеб. пособие: в 3 ч. / Е.В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2.-185.
- Поезжаева Е.В., Поликарпова К.Н., Роботизация для обеспечения комфорта в промышленных и бытовых помещениях // Молодой ученый . — 2015 . — № 14 (94) . — С. 179-181.

