Огромный рост числа автомобилей заставляет задуматься об их качественном обслуживании, что гарантирует система технического зрения (СТЗ). В данной работе нами были рассмотрены общие требования к разрабатываемой системе, которые позволят легче внедрить их в диагностику машин. Мы предложили современный подход к качественному обслуживанию автомобилей. На основе анализа использования существующих систем были сформулированы общие требования к разрабатываемой системе, а так же мы разработали полноценную схему всего комплекса, для того чтобы можно было без труда его установить в автомобильных сервисах.Среди желательных свойств СТЗ можно назвать: возможность подключения различных сенсоров (телекамер, фотодиодных линеек, лазерных сканеров), свободный выбор формата изображения, обработка изображений, непрерывно меняющихся во времени, использование быстродействующих спецпроцессоров, параллельных структур, многоканальный ввод изображений (цветные изображения, одновременное рассмотрение сцены с разных точек наблюдения), более точное описание изображений.
Ключевые слова: система технического зрения, диагностика, автоматизация, покраска, сварка, контроль, робот, сенсоры.
Наша задача состоит в том, чтобы внедрить СТЗ в диагностику и исправление дефектов в эксплуатируемых автомобилях в процессе их эксплуатации. На сегодняшний день никто не использует СТЗ при диагностике и ремонте уже используемых автомобилей, данные системы применяют только при их сборке на автомобильных заводах, например таких как Ford.
Одна из основных трудностей организации вычислительных процессов в СТЗ связана с необходимостью переработки значительных объемов данных за сравнительно короткое время, которое определяется конкретным применением системы. Простейшим способом снижения объема информации является переход к бинарным или двухградационным изображениям путем пороговой обработки исходного многоградационного изображения. Эта процедура приводит к положительным результатам только в том случае, если информативные области изображения достаточно контрастны, т. е. значительно отличаются по яркости от фона. Для обеспечения высокого контраста изображения применяют специальные средства освещения анализируемой сцены (подсветка с обратной стороны объекта, затенение отверстий, применение структурированного освещения и др.). В результате бинаризации анализируемой структуре и фону приписываются противоположные значения бинарной переменной. Обычно интересующие структуры в результате пороговой обработки разбиваются на выраженные области, которые рассматриваются как разные компоненты одного и того же изображения. В процессе обработки бинарного изображения производится измерение геометрических параметров этих компонентов (таких, как площадь, периметр и пр.). Интерпретация бинарного изображения производится на основе этих измерений и информации об относительном положении компонентов.
В процессе обработки изображения выделяются отдельные его компоненты и для каждой из них рассчитываются следующие признаки: площадь, периметр, координаты особых точек на поверхности, количество отверстий. Эти параметры подвергаются дальнейшей обработке в соответствии с конкретной решаемой задачей. Свойства данной СТЗ делают ее особенно эффективной для быстрого распознавания и определения дефектов при контроле поверхности Применением системы является автоматическая навеска колес при сборке автомобиля роботами (см. рис.1).
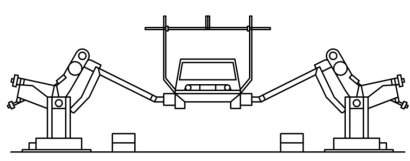
Рис.1. Навеска колес
На рис. 2 показана схема всего комплекса. Кузов автомобиля проходит перед видеокамерой СТЗ, которая измеряет положение и ориентацию ступицы. Дальнейшее продвижение кузова на подвесном конвейере производится с помощью измерительной вагонетки, поэтому положение ступицы в последующий момент времени остается известным. Информация, полученная СТЗ, передается в систему управления роботом, которая соответствующим образом корректирует программу движений.
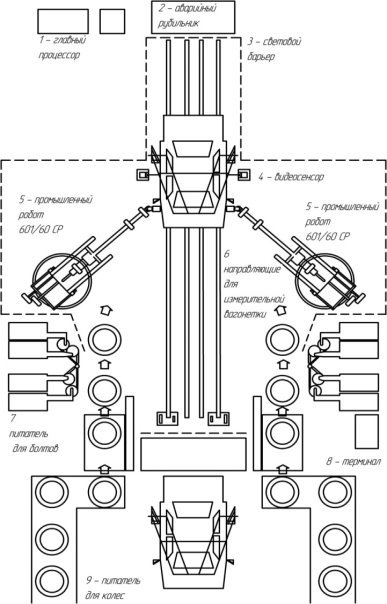
Рис. 2. Схема комплекса: 1 — главный процессор; 2 — аварийный рубильник; 3 — световой барьер; 4 — видеосенсор;5 — промышленный робот 601/60 СР; 6 — направляющие для измерительной вагонетки; 7 — питатель для болтов; 8 — терминал; 9 — питатель для колес
Камера СТЗ расположена таким образом, чтобы ее оптическая ось совпадала с осью ступицы (допустимое отклонение ±5). В качестве осветителя используется лампа, изогнутая по окружности, концентрической с осью камеры. Радиус этой окружности выбран достаточно большим, чтобы отверстия на изображении проявлялись в виде контрастных пятен. Для удаления мелких дефектов изображения производится аппаратная фильтрация бинарного изображения. Затем на отфильтрованном изображении выделяются все связные компоненты и для каждого из них рассчитываются признаки. Из этих компонентов отбираются те, для которых значения признаков соответствуют крепежным отверстиям. После этого производится геометрический тест, в процессе которого контролируется относительное положение выделенных «кандидатов» и отсеиваются ложные отверстия. Заключительным этапом является расчет положения и ориентации ступицы, перевод этих данных в систему координат робота и передача этой информации в систему управления роботом.
Калибровка коэффициентов пересчета производится на стадии обучения путем показа ступицы зрительной системе и последующего прямого измерения суставных углов робота, отвечающих положению отверстий в предъявленной ступице.
Еще одной областью применения системы является сборка автомобильных колес. Для уменьшения статического дисбаланса колес покрышку монтируют на обод таким образом, чтобы их индивидуальные дисбалансы частично компенсировали друг друга. Фирмы-изготовители ободов и покрышек наносят на них маркировку, указывающую, куда смещен центр тяжести. Функция СТЗ при сборке колеса состоит в том, чтобы выявить эти метки и управлять приводом, вращающим обод относительно покрышки. Для упрощения процедуры поиска меток и повышения помехоустойчивости системы производится маскирование изображения кольцевой маской, которая ограничивает зону поиска только той областью, где эти метки могут появиться по техническим условиям.
Важной областью применения промышленных роботов является автоматизированная окраска. В настоящее время окрашиваемые детали необходимо устанавливать в точно определенных местах рабочей зоны робота, Окраска производится «вслепую» по заранее сформированной программе. Для того чтобы робот мог окрашивать детали разных типов, поступающие в рабочую зону робота в произвольном порядке, необходимы средства автоматической классификации деталей.
Для окраски разнотипных мостов грузовых автомобилей перед покрасочной станцией была установлена измерительная система. Для достижения высокого контраста изображения моста применяется подсветка с обратной стороны, с использованием яркого экрана. Распознавание деталей проводится в две стадии. При приближении моста к камере она включается (с помощью механического выключателя) и начинает непрерывно формировать изображения движущегося моста до тех пор, пока его силуэт не достигнет контрольного окна. После этого начинается второй этап — анализ последнего введенного изображения, В процессе анализа рассчитываются площади участков силуэта, заключенных в заранее определенных окнах. Всего может быть использовано до 64 окон. Полученный таким образом вектор параметров сравнивается с эталонными векторами, сформированными при обучении системы. Классификация производится по методу ближайшего эталона. В принципе возможно введение максимальных допусков и при отличиях рассчитанного вектора от ближайшего эталона, превышающих соответствующий допуск, деталь будет забракована.
Результаты анализа передаются в систему управления окрасочным роботом, которая заносит их в буфер, работающий по принципу «первым пришел — первым ушел». После окончания очередного цикла окраски, из этого буфера извлекается информация о том, какую деталь красить следующей, и запускается соответствующая программа покраски.
Для классификации деталей более широкой номенклатуры существует специальный метод иерархического анализа признаков. Схема классификации имеет структуру сети, состоящей из узлов и дуг. В этой сети определяется начальный узел и несколько целевых. Дуги соответствуют различным операциям (установка окна, арифметические операции). Задача классифицирующей системы состоит в том, чтобы найти некоторый путь из начального узла в один из целевых. В процессе поиска при прослеживании дуг выполняются соответствующие операции и проводятся необходимые проверки. Если условия проверки не выполняются, соответствующая ветвь дальше не просматривается и производится возврат на ближайшую точку ветвления, из которой исходит еще не исследованный путь.
Крупной областью применения СТЗ является сварка. Задачи сенсорной системы здесь включают в себя локализацию начала шва, прослеживание шва, управление процессом сварки. Система позволяет проводить пошаговые измерения простых геометрических величин по видеосигналу, поступающему с камеры. При слежении за швом система работает в режиме замкнутой обратной связи с частотой опроса видеодатчика 50 Гц.
Один из примеров использования этой системы связан с производством деталей подвески автомобиля. При этой операции система выполняет следующие функции.
- позиционирование горелки перед началом сварки. Для определения положения шва используется структурированное освещение световой плоскостью,
- коррекция положения горелки в процессе сварки (слежение за швом). Определение положения горелки по отношению к шву производится на основе прямого наблюдения и анализа (бинарных) изображений зоны расплавленного металла.
Для устранения слепящего эффекта электрической дуги при наблюдении зоны расплавленного металла необходимы специальные средства управления экспозицией. Эту роль выполняет оптический затвор, вмонтированный в объектив телекамеры и синхронизированный с циклом дуги. Эксплуатация системы на этой операции в течение примерно двух лет показывает свою высокую эффективность. Точность позиционирования горелки повышается.
В примерах описанных выше, анализировались бинарные изображения, что требовало высокого контраста сцены и стабильности аппаратуры формирования изображений, в частности средств освещения и камеры. Эти требования можно в значительной степени ослабить, если перейти к анализу многоградационных изображений. Положение контуров объекта на таком изображении определяется по яркостному перепаду и не зависит от абсолютных уровней яркости изображения. Кроме того, в результате анализа полутонов может быть получена дополнительная информация, такая как соотношения контраста между различными частями изображения, форма сигнала в переходной зоне между двумя уровнями яркости или статистическое распределение уровней.
Относительно простым способом обработки полутоновых изображений является прямое сравнение сигналов методом корреляции. Для обеспечения этого необходима непрерывная коррекция положения схвата манипулятора и диагностированного участка автомобиля.
Для решения этой задачи применяется устройство, которое непрерывно измеряет и корректирует положение звеньев манипулятора. В качестве датчика в этом устройстве использована пара фото-диодов, с помощью которых через световоды считывается профиль рисунка по обе стороны шва. Измерения производятся непрерывно. Сигналы, поступающие с диодов, сравниваются друг с другом, и методом корреляции определяется смещение рисунка. Для ускорения работы устройства в нем использован аппаратный цифровой коррелятор.
В настоящее время реальных областей применения зрительных систем меньше по сравнению с широким спектром задач, которые можно было бы решать с их помощью. Можно назвать две причины такого положения,
- эффективность современных систем технического зрения при решении тех или иных практических задач часто достигается за счет их усложнения, связанного с большими затратами, что делает использование СТЗ экономически невыгодным.
- крупным препятствием на пути широкого распространения СТЗ в промышленности является плохая связь между разработчиками систем и потребителем. [1-7]
Мы предложили современный подход к качественному обслуживанию автомобилей. На основе анализа использования существующих систем были сформулированы общие требования к разрабатываемой системе, которые позволят легче внедрить их в диагностику и ремонт автомобилей, а так же мы разработали полноценную схему всего комплекса, для того чтобы можно было без труда его установить в автомобильных сервисах. Среди желательных свойств СТЗ можно назвать: возможность подключения различных сенсоров (телекамер, фотодиодных линеек, лазерных сканеров), свободный выбор формата изображения, обработка изображений, непрерывно меняющихся во времени, использование быстродействующих спецпроцессоров, параллельных структур, многоканальный ввод изображений (цветные изображения, одновременное рассмотрение сцены с разных точек наблюдения), более точное описание изображений.
Литература:
- Федотов А.Г., Поезжаева Е.В., Заглядов П.В., Безопасность труда при взаимодействии с промышленными роботами//Экология и научно-технический прогресс. Урбанистика, 2014, стр. 14-15.
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
- Зенкевич С.Л., Ющенко А:.С. Управление роботами.- М.:Изд-во МГОУ им. Н. Э. Баумана, 2006.
- Корендясев А.И. Теоретические основы робототехники: в 2 кн./ А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес; отв. Ред. С.М. Каплунов.– М.:Наука,2006.
- Хорн Б.К. Зрение роботов.– М.:Мир,1989.
- Михайлов С.В., Романов В.В., Заикин Д.А., Система технического зрения для диагностики процесса резания материалов//Вестник компьютерных и информационных технологий.,2007,№ 4,стр 23-26
- В.И. Сырямкин, B.C. Титов, Ю.Г. Якушенков,Системы технического зрения-МГП "РАСКО",1992

