




Управление движением вращающегося тела с полостью, частично заполненной идеальной жидкостью
Авторы: Башлыков Александр Михайлович, Есенков Александр Сергеевич, Попов Николай Николаевич
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
II международная научная конференция «Современные тенденции технических наук» (Уфа, май 2013)
Статья просмотрена: 159 раз
Библиографическое описание:
Башлыков, А. М. Управление движением вращающегося тела с полостью, частично заполненной идеальной жидкостью / А. М. Башлыков, А. С. Есенков, Н. Н. Попов. — Текст : непосредственный // Современные тенденции технических наук : материалы II Междунар. науч. конф. (г. Уфа, май 2013 г.). — Т. 0. — Уфа : Лето, 2013. — С. 25-29. — URL: https://moluch.ru/conf/tech/archive/74/3891/ (дата обращения: 20.04.2024).
Рассматривается в линейной постановке задача Коши для возмущённого относительно равномерного вращения движения динамически симметричного твёрдого тела с полостью, содержащей идеальную жидкость со свободной поверхностью. При этом никаких ограничений на форму полости и характер возмущённого движения не накладывается. На основе полученных уравнений исследуется устойчивость стационарного вращения тела с жидкостью и намечается постановка широкого класса задач оптимального управления, для которых используются классические подходы принципа максимума Понтрягина и принципа оптимальности Беллмана.
Ключевые слова: уравнения Навье-Стокса, принцип максимума Понтрягина, вихревые движения жидкости
В работе проводится анализ возмущённого относительно равномерного вращения всей системы как твёрдого тела с полостью, частично заполненной идеальной жидкостью. На основе полученных уравнений исследуется устойчивость свободного вращения тела с жидкостью. Найденная более сложная чем в [1,2] зависимость угловых скоростей от моментов позволяет ставить различные задачи оптимального управления. После преобразований устанавливается применимость формализма Гамильтона-Понтрягина, как и в [1–3].
Постановка задачи
Здесь используются результаты [4, 5, 7]. Рассмотрим твердое тело с полостью D, частично заполненной идеальной несжимаемой жидкостью плотности ρ, частично газом, давление которого ![]() , движущееся в поле массовых сил с потенциалом U. Область Q, занятая жидкостью, ограничена смоченной поверхностью S полости и свободной поверхностью
, движущееся в поле массовых сил с потенциалом U. Область Q, занятая жидкостью, ограничена смоченной поверхностью S полости и свободной поверхностью ![]() . Уравнения движения жидкости, граничные и начальные условия запишем в произвольной системе координат
. Уравнения движения жидкости, граничные и начальные условия запишем в произвольной системе координат ![]() , жестко связанной с твердым телом:
, жестко связанной с твердым телом:
![]()
![]()
![]()
![]()
![]() . (1)
. (1)
Точкой обозначена производная по времени в системе координат ![]() ;
; ![]() — абсолютное ускорение точки O,
— абсолютное ускорение точки O, ![]() — абсолютная угловая скорость тела,
— абсолютная угловая скорость тела, ![]() — его угловое ускорение,
— его угловое ускорение, ![]() — радиус–вектор, отсчитанный от точки O,
— радиус–вектор, отсчитанный от точки O, ![]() — скорость жидкости в системе координат
— скорость жидкости в системе координат ![]() , t — время, P — давление,
, t — время, P — давление, ![]() — орт внешней нормали к
— орт внешней нормали к ![]() ,
, ![]() — уравнение свободной поверхности жидкости. Кинетический момент
— уравнение свободной поверхности жидкости. Кинетический момент ![]() тела с жидкостью относительно центра инерции всей системы запишем в виде
тела с жидкостью относительно центра инерции всей системы запишем в виде
![]() (2)
(2)
Здесь J — тензор инерции всей системы относительно точки ![]() , складывающийся из тензоров инерции тела
, складывающийся из тензоров инерции тела ![]() и затвердевшей жидкости
и затвердевшей жидкости ![]() относительно той же точки. Область
относительно той же точки. Область ![]() ограничена смоченной поверхностью
ограничена смоченной поверхностью ![]() и свободной поверхностью
и свободной поверхностью ![]() в невозмущенном движении, которая в первом приближении имеет цилиндрическую форму. В рассматриваемом приближении тело с полостью, содержащей жидкость, является гиростатом — центр инерции системы
в невозмущенном движении, которая в первом приближении имеет цилиндрическую форму. В рассматриваемом приближении тело с полостью, содержащей жидкость, является гиростатом — центр инерции системы ![]() неподвижен относительно системы координат
неподвижен относительно системы координат ![]() [6], а тензоры
[6], а тензоры ![]() ,
, ![]() , J постоянны в этой системе координат. Второе слагаемое в равенстве (2), называемое гиростатическим моментом, не зависит от выбора полюса и может быть подсчитано относительно точки
, J постоянны в этой системе координат. Второе слагаемое в равенстве (2), называемое гиростатическим моментом, не зависит от выбора полюса и может быть подсчитано относительно точки ![]() , что и сделано в равенстве (2). Уравнение моментов относительно точки
, что и сделано в равенстве (2). Уравнение моментов относительно точки ![]() запишем в системе координат
запишем в системе координат ![]() , связанной с телом
, связанной с телом
![]() (3)
(3)
Здесь ![]() — главный момент относительно точки
— главный момент относительно точки ![]() всех внешних сил, действующих на тело с жидкостью. Уравнения (1) — (3) вместе с обычными уравнениями движения центра инерции, кинематическими соотношениями и начальными условиями полностью описывают динамику тела с жидкостью. Пусть невозмущенное движение тела с жидкостью относительно центра инерции
всех внешних сил, действующих на тело с жидкостью. Уравнения (1) — (3) вместе с обычными уравнениями движения центра инерции, кинематическими соотношениями и начальными условиями полностью описывают динамику тела с жидкостью. Пусть невозмущенное движение тела с жидкостью относительно центра инерции ![]() представляет собой вращение всей системы вокруг оси
представляет собой вращение всей системы вокруг оси ![]() , проходящей через точку
, проходящей через точку ![]() параллельно оси
параллельно оси ![]() , с постоянной угловой скоростью
, с постоянной угловой скоростью ![]() так, что свободная поверхность имеет цилиндрическую форму. В невозмущенном движении имеем:
так, что свободная поверхность имеет цилиндрическую форму. В невозмущенном движении имеем: ![]() ,
, ![]() ,
, ![]() ,
, ![]() , где
, где ![]() — орт оси
— орт оси ![]() ,
, ![]() — радиус свободной поверхности в невозмущенном движении,
— радиус свободной поверхности в невозмущенном движении, ![]() ,
, ![]() ,
, ![]() . Рассмотрим возмущенное движение системы. Положим
. Рассмотрим возмущенное движение системы. Положим
![]()
![]() ,
, ![]() ,
, ![]() (4)
(4)
и будем считать в возмущенном движении величины ![]() малыми первого порядка. Подставляя соотношения (4) в уравнения (1) и отбрасывая малые высших порядков, приведем задачу о движении жидкости к виду
малыми первого порядка. Подставляя соотношения (4) в уравнения (1) и отбрасывая малые высших порядков, приведем задачу о движении жидкости к виду
![]() ,
, ![]()
![]()
![]()
![]()
![]() . (5)
. (5)
Аналогично уравнения движения тела с жидкостью примут вид ![]() . Рассмотрим гидродинами-ческую задачу (5). Положим в задаче (5)
. Рассмотрим гидродинами-ческую задачу (5). Положим в задаче (5) ![]() и рассмотрим вспомогательную задачу о колебаниях жидкости в равномерно вращающемся сосуде, решение которой будем искать в форме гармонических колебаний
и рассмотрим вспомогательную задачу о колебаниях жидкости в равномерно вращающемся сосуде, решение которой будем искать в форме гармонических колебаний ![]() Таким образом, имеем следующую задачу:
Таким образом, имеем следующую задачу: ![]()
![]()
![]()
![]() . Воспользуемся линейным преобразованием
. Воспользуемся линейным преобразованием ![]() [7]:
[7]: ![]() . Тогда для функции
. Тогда для функции ![]() получаем краевую задачу на собственные значения
получаем краевую задачу на собственные значения
 (6)
(6)
Устойчивость динамической системы «тело — жидкость»
Рассмотрим вопрос об устойчивости свободного вращения описанной системы. В пространстве Лапласа характеристическое уравнение системы (11) при ![]() имеет вид (при
имеет вид (при ![]() )
)
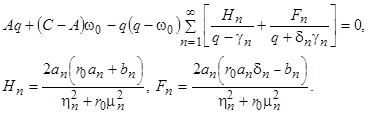 (7)
(7)
Для устойчивости стационарного вращения необходимо, чтобы все корни уравнения (7) были действительными. Ограничимся первым приближением, оставив вместо бесконечной суммы в (7) один главный член (![]() ). В этом случае характеристическое уравнение является многочленом третьей степени относительно q:
). В этом случае характеристическое уравнение является многочленом третьей степени относительно q:
![]() (8)
(8)
Здесь
![]()
![]()
![]()
Заменяя в уравнении (8) неизвестное q новым неизвестным ![]() , связанным с q равенством
, связанным с q равенством ![]() получим неполное кубическое уравнение относительно
получим неполное кубическое уравнение относительно ![]() :
: ![]() где
где ![]() Для устойчивости свободного вращения параметры системы должны удовлетворять условию
Для устойчивости свободного вращения параметры системы должны удовлетворять условию ![]() При этом на границе области устойчивости выполняется условие
При этом на границе области устойчивости выполняется условие ![]() .
.
Возмущение как функция управляющего момента.
Для решения задачи оптимального управления вращением системы тело — жидкость необходимо иметь выражение возмущения угловой скорости ![]() как функции управляющего момента
как функции управляющего момента ![]() .
.
Для дальнейшего анализа оставим одно слагаемое в бесконечной сумме в первом уравнении системы (7).
Преобразование оригинала ![]() по Лапласу будем обозначать
по Лапласу будем обозначать ![]() , т. е.
, т. е.
Выполнив преобразование Лапласа, выразим ![]() из второго и третьего уравнений и, подставив в первое уравнение, получим выражение
из второго и третьего уравнений и, подставив в первое уравнение, получим выражение ![]() в пространстве Лапласа:
в пространстве Лапласа:
![]()
![]()
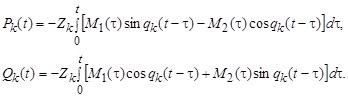
Для обратного преобразования Лапласа воспользуемся теоремой о свертке и теоремами разложения операционного исчисления [6]. Тогда
 (9)
(9)
Задача управления возмущенным движением
Вспомним, что ![]() ,
, ![]() . Введем следующие обозначения:
. Введем следующие обозначения:
Тогда имеем
![]() ,
, ![]() . (10)
. (10)
Окончательно получаем эквивалентную систему обыкновенных дифференциальных уравнений, которую вместе с начальными условиями, введя обозначения
![]()
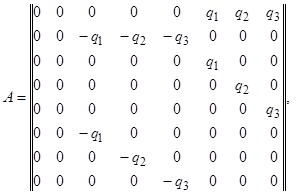
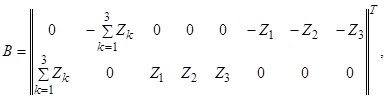
запишем в виде
![]()
Заключение
В работе рассмотрено возмущенное относительно равномерного вращения движение тела с полостью, содержащей идеальную жидкость со свободной поверхностью. Задача исследована в линейной постановке. Это означает, что угловые скорости, перпендикулярные основному вращению, много меньше угловой скорости основного вращения. Это достигается выбором времени в функционалах оптимизации, либо искусственным поддержанием достаточно большой угловой скорости продольного вращения. Проблема совместного решения уравнений гидродинамики и механики сведена к решению некоторой задачи на собственные значения. Происходящее при этом отделение временной координаты от пространственных координат позволило авторам анализировать произвольное возмущенное движение тела, а решение краевых задач находить для полостей произвольной формы. Методом возмущений решена задача об устойчивости свободного вращения тела с жидкостью. Ставится широкий класс задач оптимального управления, для которых применим формализм Гамильтона — Понтрягина.
Литература:
1. Гурченков А. А., Есенков А. С., Цурков В. И. Управление движением ротора с полостью, содержащей идеальную жидкость ч.1 // Изв РАН. ТСУ. 2006. № 1. С. 135–142.
2. Гурченков А. А., Есенков А. С., Цурков В. И. Управление движением ротора с полостью, содержащей идеальную жидкость ч.2 // Изв РАН. ТСУ. 2006. № 3. С. 82–89.
3. Гурченков А. А., Есенков А. С., Цурков В. И. Управление движением ротора с полостью, содержащей вязкую жидкость // АиТ. 2007. № 2. С. 81–94.
4. Гурченков А. А., Корнеев В. В. Носов М. В. Динамика слабовозмущенного движения заполненного жидкостью гироскопа и задача управления // ПММ, 2008. Т. 72. Вып. 6. С. 904–911.
5. Гурченков А. А. Динамика завихренной жидкости в полости вращающегося тела. М.: Физматлит, 2010.
6. Диткин В. А., Прудников А. П. Интегральные преобразования и операционное исчисление. М.: Наука, 1974.
7. Гурченков А. А., Грдина Е. Д., Башлыков А. М. Задача о колебаниях ротора, содержащего жидкость со свободной поверхностью // ЖВМиМФ. 2002. V.42. N.1. P.101–105.
Похожие статьи
К задаче об оптимальной стабилизации управляемых систем...
свободная поверхность, система координат, оптимальное управление, угловая скорость, жидкость, тело, задача, твердое тело, невозмущенное движение, уравнение. Проблемы стабилизации орбитального движения космического...
Интегрирование уравнений динамики твердого тела
Запишем исходную систему уравнений Гамильтона для невозмущенного движения твердого тела
Получим выражение проекций угловых скоростей твердого тела на оси подвижной системы координат [3]
О характеристиках длинных волн, существующих на течении
1. Общая постановка задачи. Рассматривается плоское движение идеальной несжимаемой однородной тяжелой жидкости относительно неподвижных осей ось направлена
При этом ось направлена вдоль невозмущенного уровня свободной поверхности.
О явной форме сил реакций сервосвязей | Статья в журнале...
Управление движением вращающегося тела с полостью, частично... В невозмущенном движении имеем: , , , , где — орт оси , — радиус свободной поверхности в невозмущенном движении, , , . Рассмотрим возмущенное движение системы.
Моделирование полета квадрокоптера в среде SolidWorks Motion
Решение задачи управления перемещением квадрокоптера... где — масса твердого тела; — ускорение свободного падения; — матрица инерции; — координаты центра масс (в НСК). а уравнения движения принимают следующий вид: (3).
Решение задачи управления перемещением квадрокоптера...
MATLAB, канонический вид, угол крена, ось, система, угловая скорость, твердое тело, нелинейная стабилизация, математическая модель, неподвижная система координат.
Анализ условий устойчивости стационарного движения редуктора
Методика изучения вращательного движения твердого тела... Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости.
Возможные методы решения математических задач...
Управление движением вращающегося тела с полостью, частично... Ключевые слова: уравнения Навье-Стокса, принцип максимума Понтрягина, вихревые движения жидкости.
Определение некоторых параметров летательных аппаратов...
Наличие различных по величине давлений у поверхности твердого тела приводит к возникновению аэродинамических сил и
Направим ось Оx вдоль скорости потока газа и обозначим через и – скорость, давление, плотность и температура в невозмущенном телом...
Похожие статьи
К задаче об оптимальной стабилизации управляемых систем...
свободная поверхность, система координат, оптимальное управление, угловая скорость, жидкость, тело, задача, твердое тело, невозмущенное движение, уравнение. Проблемы стабилизации орбитального движения космического...
Интегрирование уравнений динамики твердого тела
Запишем исходную систему уравнений Гамильтона для невозмущенного движения твердого тела
Получим выражение проекций угловых скоростей твердого тела на оси подвижной системы координат [3]
О характеристиках длинных волн, существующих на течении
1. Общая постановка задачи. Рассматривается плоское движение идеальной несжимаемой однородной тяжелой жидкости относительно неподвижных осей ось направлена
При этом ось направлена вдоль невозмущенного уровня свободной поверхности.
О явной форме сил реакций сервосвязей | Статья в журнале...
Управление движением вращающегося тела с полостью, частично... В невозмущенном движении имеем: , , , , где — орт оси , — радиус свободной поверхности в невозмущенном движении, , , . Рассмотрим возмущенное движение системы.
Моделирование полета квадрокоптера в среде SolidWorks Motion
Решение задачи управления перемещением квадрокоптера... где — масса твердого тела; — ускорение свободного падения; — матрица инерции; — координаты центра масс (в НСК). а уравнения движения принимают следующий вид: (3).
Решение задачи управления перемещением квадрокоптера...
MATLAB, канонический вид, угол крена, ось, система, угловая скорость, твердое тело, нелинейная стабилизация, математическая модель, неподвижная система координат.
Анализ условий устойчивости стационарного движения редуктора
Методика изучения вращательного движения твердого тела... Для колеса вращающегося вокруг оси симметрии направление вектора совпадает с направлением вектора угловой скорости.
Возможные методы решения математических задач...
Управление движением вращающегося тела с полостью, частично... Ключевые слова: уравнения Навье-Стокса, принцип максимума Понтрягина, вихревые движения жидкости.
Определение некоторых параметров летательных аппаратов...
Наличие различных по величине давлений у поверхности твердого тела приводит к возникновению аэродинамических сил и
Направим ось Оx вдоль скорости потока газа и обозначим через и – скорость, давление, плотность и температура в невозмущенном телом...




