




Анализ регулятора скорости замкнутой следящей системы двигатель постоянного тока — тиристорный преобразователь
Авторы: Дараев Абдумежит Масимович, Султанов Ануар Канатулы, Сибаев Акниет Сабырулы
Рубрика: 4. Электротехника
Опубликовано в
III международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2016)
Дата публикации: 15.03.2016
Статья просмотрена: 699 раз
Библиографическое описание:
Дараев, А. М. Анализ регулятора скорости замкнутой следящей системы двигатель постоянного тока — тиристорный преобразователь / А. М. Дараев, Ануар Канатулы Султанов, Акниет Сабырулы Сибаев. — Текст : непосредственный // Технические науки: теория и практика : материалы III Междунар. науч. конф. (г. Чита, апрель 2016 г.). — Чита : Издательство Молодой ученый, 2016. — С. 57-60. — URL: https://moluch.ru/conf/tech/archive/165/9889/ (дата обращения: 17.04.2024).
В статье рассматриваются следящая система управления электропривода постоянного тока СФЭС. В структурной схеме следящей системе управления приводится регулятор скорости с переменной структурой в среде MATLAB и приводятся графики переходных процессов скорости и угла поворота исполнительного вала системы.
Ключевые слова: следящие электроприводы, гелиоустановка, солнечная фотоэлектрическая станция, система управления.
The article discusses the servo control system of a DC drive SFAS. In the block diagram of servo control system provides speed control with variable structure in the MATLAB environment and provides graphs of transient speed and angle of the executive shaft system
Keywords: The watching electric drives, a solar power plant, solar photo-electric station, a control system.
Повышение точности слежения и качества переходных процессов скорости и угла исполнительного вала двигателя постоянного тока солнечной фотоэлектрической станции (СФЭС) существенно зависит от регулятора скорости следящей системы. [1]. Структурная схема системы управления следящего электропривода постоянного тока солнечной фотоэлектрической станции [2] представлена на рисунке 1.
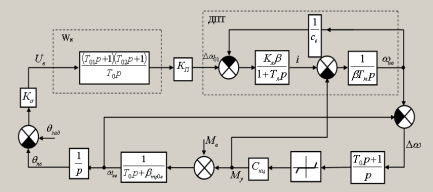
Рис. 1. Структурная схема следящего электропривода солнечной фотоэлектрической станции
Как видно из рисунка 1, следящий электропривод солнечной фотоэлектрической станции состоит: из двигателя постоянного тока независимого возбуждения, представленный двумя звеньями (интегрирующим и инерционным эвеном), охваченные отрицательной обратной связью, тиристорного преобразователя с передаточным коэффициентом ![]() корректирующего звена (ПИД регулятор) и нелинейного звена, моделирующего люфт редуктора. Исследования переходных процессов следящего электропривода постоянного тока солнечной фотоэлектрической станции (СФЭС) показали [3], что система не вполне отвечает качественным характеристикам динамики следящего электропривода. В связи с этим предлагается новая структурная схема тиристорного следящего электропривода постоянного тока c нелинейным корректирующим устройством в среде MATLAB, которая приведена на рисунке 2. Выбранное нелинейное корректирующее устройство [4] аналогично звену с переменной структурой. В связи с этим систему управления следящего электропривода постоянного тока можно рассматривать как систему с переменной структурой.
корректирующего звена (ПИД регулятор) и нелинейного звена, моделирующего люфт редуктора. Исследования переходных процессов следящего электропривода постоянного тока солнечной фотоэлектрической станции (СФЭС) показали [3], что система не вполне отвечает качественным характеристикам динамики следящего электропривода. В связи с этим предлагается новая структурная схема тиристорного следящего электропривода постоянного тока c нелинейным корректирующим устройством в среде MATLAB, которая приведена на рисунке 2. Выбранное нелинейное корректирующее устройство [4] аналогично звену с переменной структурой. В связи с этим систему управления следящего электропривода постоянного тока можно рассматривать как систему с переменной структурой.
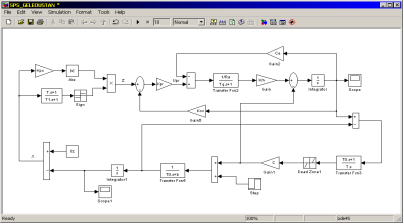
Рис. 2. Структурная схема системы управления с переменной структурой в среде MATLAB
Нелинейное корректирующее устройство придает системе свойство самонастройки по величине ошибки, возникающей в системе в процессе управления [4]. Однако, для улучшения качества процесса управления и точности отработки входного сигнала системы управления, регулятор скорости, представленный нелинейным корректирующим звеном (рисунок 2) можно преобразовать следующим образом. Вывести из нелинейного корректирующего звена (регулятор скорости) звено абсолютной величины переменной ![]() , а вместо функции знака sign(x) ввести релейное звено и вместо множительного звена ввести звено суммирования. В этом случае оптимизированная структурная схема системы управления с переменной структурой следящего электропривода постоянного тока солнечной фотоэлектрической станции (СФЭС), с параметрами двигателя постоянного тока (таблица 1), приобретает следующею структуру (рисунок 3).
, а вместо функции знака sign(x) ввести релейное звено и вместо множительного звена ввести звено суммирования. В этом случае оптимизированная структурная схема системы управления с переменной структурой следящего электропривода постоянного тока солнечной фотоэлектрической станции (СФЭС), с параметрами двигателя постоянного тока (таблица 1), приобретает следующею структуру (рисунок 3).
Таблица 1
Параметрами двигателя постоянного тока
|
|
|
|
|
|
|
0.17 |
110 |
3000 |
5.84 |
128 |
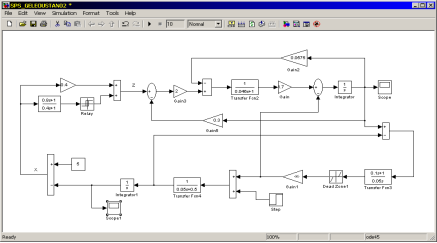
Рис. 3. Оптимизированная структурная схема системы управления с переменной структурой СФЭС
На рисунке 4 приведены графики переходных процессов скорости и угла поворота исполнительного вала двигателя.
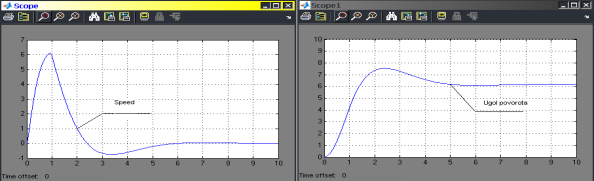
Рис. 4. Графики переходных процессов скорости и угла поворота исполнительного вала системы
Структурная схема следящего электропривода постоянного тока СФЭС (рисунок 3) более удобна для получения линеаризованной структурной схемы и передаточной функции системы. Линеаризованная структурная схема следящего электропривода (СЭП) представлена на рисунке 5. Отметим, что линеаризация осуществлялась для нелинейного звена с зоной нечувствительности (звено моделирующее люфт редуктора) согласно [5] и нелинейного звена регулятора скорости (реле).
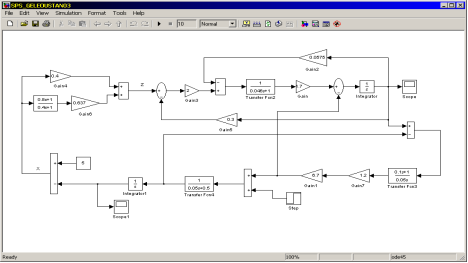
Рис. 5 Структурная схема линеаризованной системы СЭП СФЭС
На рисунке 6 приведены графики переходных процессов скорости и угла поворота вала ротора двигателя постоянного тока, полученные на основе структурной схемы линеаризованной системы управления СЭП СФЭС в среде MATLAB
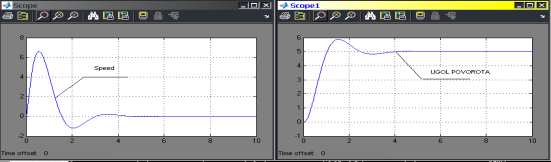
Рис. 6. Графики переходных процессов скорости и угла поворота исполнительного вала системы
Как видно из рисунка 6, переходные процессы скорости и угла поворота вала двигателя аналогичны по качественным характеристикам переходных процессов, представленные на рисунке 4. Полученная структурная схема модели следящего электропривода солнечной фотоэлектрической станции (рисунок 5) является оптимизированной системой с линеаризованным регулятором скорости.
Выводы
Разработана структурная схема линеаризованной системы управления следящего электропривода постоянного тока СФЭС.
Переходные процессы скорости и угла поворота исполнительного вала системы без линеаризации и с линеаризацией системы управления идентичны.
Литература:
- Сорокин Г. А. Электроприводы энергетических гелиоустановок без концентрации энергии. Автореферат кандидатской диссертации.-М.:МЭИ.2005–23с.
- Овсянников Е. М. Электропривод энергетической гелиоустановки. Электропривод энергетической гелиоустановки. — М.: Привод и управление. 2000.№ 2.-С.4–9.
- Терехов В. М. Овсянников Е. М. Цаценкин В. К., Малоредукторный следящий электропривод для систем наведения,-М.: МЭИ,2000.С.46–58.
- Попов Е. П. Теория нелинейных систем автоматического регулирования и управления. — М.: Наука, 1988.
- Теория автоматического управления. Ч. II. Под ред. А. В. Нетушила. — М.:«Высшая школа», 1972.
Ключевые слова
система управления, следящие электроприводы, гелиоустановка, солнечная фотоэлектрическая станцияПохожие статьи
Анализ устойчивости замкнутой нелинейной системы...
переходных процессов системы автоматического управления и по фазовым траекториям определять устойчивость системы управления. Структурная схема замкнутой системы ПЧ-АД с нелинейным статическим звеном в MATLAB представлено на рисунке 1.
Анализ передаточной функции структурной схемы вентильного...
Структурная схема двигателя и параметры её динамических звеньев выбраны в соответствии [3]. График переходного процесса скорости двигателя, полученный с помощью MATLAB, приведен на рисунке 2.
Математическое моделирование электропривода на базе...
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Исследование системы векторного управления...
Рис.1. Структурная схема модели системы векторного управления в осях (u — v).
Поэтому для решения системы уравнений, моделирующих частотнорегулируемый привод, был выбран программный пакет Matlab Simulink.
Моделирование моментов нагрузки электродвигателей в MATLAB
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Моделирование САР скорости асинхронного двигателя...
Рис. 4. Пропорциональный регулятор скорости.
Скольжение системы координат и скорость её вращения определяются по следующим зависимостям [4]
Рис. 8. Реализация определения в Matlab. Математическая модель оболочки асинхронного двигателя с переменными на...
Моделирование САР скорости системы «АИН ШИМ – АД»...
Пропорциональный регулятор скорости. В системе управления предусмотрена компенсация внутренних перекрестных связей.
Рис. 2. Структурная схема для определения тока isx в Simulink. Преобразуем уравнение (1) для программирования в Matlab-Script.
Моделирование алгоритма работы бесплатформенной...
Углы поворотов Эйлера-Крылова.
Моделирование системы векторного управления для привода...
Моделирование асинхронного двигателя с переменными is – ψr в Matlab-Script в системе относительных единиц.
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие.
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров...
Похожие статьи
Анализ устойчивости замкнутой нелинейной системы...
переходных процессов системы автоматического управления и по фазовым траекториям определять устойчивость системы управления. Структурная схема замкнутой системы ПЧ-АД с нелинейным статическим звеном в MATLAB представлено на рисунке 1.
Анализ передаточной функции структурной схемы вентильного...
Структурная схема двигателя и параметры её динамических звеньев выбраны в соответствии [3]. График переходного процесса скорости двигателя, полученный с помощью MATLAB, приведен на рисунке 2.
Математическое моделирование электропривода на базе...
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Исследование системы векторного управления...
Рис.1. Структурная схема модели системы векторного управления в осях (u — v).
Поэтому для решения системы уравнений, моделирующих частотнорегулируемый привод, был выбран программный пакет Matlab Simulink.
Моделирование моментов нагрузки электродвигателей в MATLAB
Моделирование системы векторного управления для привода... MATLAB, Блок, векторное управление, главное движение, модель, переходной процесс напряжений статора, статический момент, короткозамкнутый ротор, асинхронный двигатель, момент времени.
Моделирование САР скорости асинхронного двигателя...
Рис. 4. Пропорциональный регулятор скорости.
Скольжение системы координат и скорость её вращения определяются по следующим зависимостям [4]
Рис. 8. Реализация определения в Matlab. Математическая модель оболочки асинхронного двигателя с переменными на...
Моделирование САР скорости системы «АИН ШИМ – АД»...
Пропорциональный регулятор скорости. В системе управления предусмотрена компенсация внутренних перекрестных связей.
Рис. 2. Структурная схема для определения тока isx в Simulink. Преобразуем уравнение (1) для программирования в Matlab-Script.
Моделирование алгоритма работы бесплатформенной...
Углы поворотов Эйлера-Крылова.
Моделирование системы векторного управления для привода...
Моделирование асинхронного двигателя с переменными is – ψr в Matlab-Script в системе относительных единиц.
Моделирование прямого пуска асинхронного двигателя с ШИМ...
Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие.
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров...




