




Управление шаговым двигателем с помощью NI MyRIO
Авторы: Ульянов Александр Владимирович, Коваленко Марк Витальевич
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
III международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2016)
Дата публикации: 18.03.2016
Статья просмотрена: 2201 раз
Библиографическое описание:
Ульянов, А. В. Управление шаговым двигателем с помощью NI MyRIO / А. В. Ульянов, М. В. Коваленко. — Текст : непосредственный // Технические науки: теория и практика : материалы III Междунар. науч. конф. (г. Чита, апрель 2016 г.). — Чита : Издательство Молодой ученый, 2016. — С. 43-46. — URL: https://moluch.ru/conf/tech/archive/165/10016/ (дата обращения: 26.04.2024).
Ключевые слова: шаговый двигатель, контроллер NIMyRIO, виртуальный прибор.
Вопрос создания управляющего программного обеспечения для различного рода приводов довольно актуален на сегодняшний день. Рынок программного обеспечения такого рода программ перенасыщен, но зачастую готовый функционал предлагаемой программы или пакета не всегда может удовлетворить задумку инженера разработчика.
В данной статье рассмотрен пример написанных программ в среде графического программирования LABVIEW для работы с шаговым двигателем Nanotec ST5918M1008 и драйвером шагового двигателя. LABVIEW хорошо себя зарекомендовала [1] и поэтому много разноплановых проектов [2, 3] было выполнено с использованием среды графического программирования совместно с оборудованием NI и собственными разработками [1–5].
В современной технике, в качестве исполнительного устройства для различных систем управления часто используют шаговые электродвигатели. В качестве примера будет рассмотрен восьми — проводной шаговой двигатель модели Nanotec ST5918M1008.
Блок управления шаговым двигателем содержит контроллер NationalInstrumentsMyRIO рис.1 и силовой драйвер G210X рис.2.

Рис. 1. NationalInstrumentsMyRIO
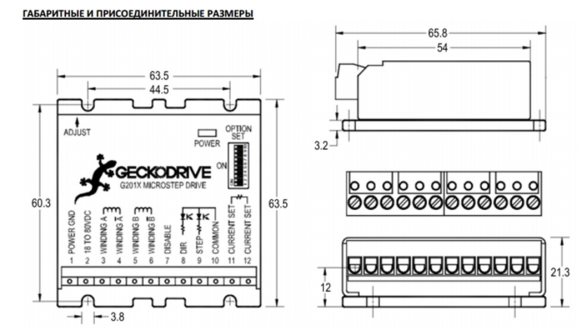
Рис. 2. Драйвер шагового двигателя
ПОДКЛЮЧЕНИЕ ШАГОВОГО ДВИГАТЕЛЯ
Контакт 3 WINDING A Начало первой (А) обмотки ШД.
Контакт 4 WINDING /A Конец первой (А) обмотки ШД.
Контакт 5 WINDING B Начало второй (В) обмотки ШД.
Контакт 6 WINDING /B Конец второй (В) обмотки ШД.
К драйверу рис. 2. можно подключать двухфазные шаговые двигатели не только с 4 выводами, но и с 6-ю или 8-ю выводами в биполярном включении. Для корректной работы драйвера индуктивность обмотки ШД должна быть не менее 1 мГн.
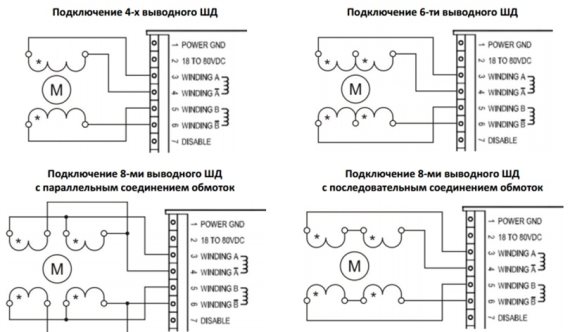
Рис. 3. Схемы подключения обмоток ШД
Управление вращением ШД осуществляется посредством двух логических сигналов STEP (ШАГ) и DIRECTION (НАПРАВЛЕНИЕ). Поворот ротора ШД на один микрошаг осуществляется по активному фронту импульса сигнала STEP в сторону, заданную сигналом DIRECTION. Входные сигналы STEP и DIRECTION гальванически изолированы от внутренних цепей драйвера через высокоскоростной оптрон. Рабочее напряжение данных сигналов составляет от 3.3В до 5В, что соответствует полному диапазону уровней логических сигналов современных цифровых устройств. Минимальный входной ток управляющих сигналов, достаточный для корректной работы драйвера, составляет всего 2.5 мА.
Драйвер G201X имеет универсальный общий вход COMMON для сигналов STEP и DIRECTION, который может быть подключен как к «плюсу» (+3.3В — 5В), так и к «минусу» (GND) контроллера или задающего генератора. Таким образом, если в управляющем контроллере используется NPN выход, то на контакт COMMON подается напряжение питания (+3.3В — 5В) контроллера. Если же в управляющем контроллере используется PNP выход или цифровой КМОП выход, то контакт COMMON соединяется с общим контактом (GND) контроллера.
Учебный прибор разработчика NIMyRIO (рис.1.) был создан для того, чтобы студенты могли в течение одного семестра решать «настоящие» инженерные задачи.
Он содержит двухъядерный программируемый процессор ARMCortex-A9 с тактовой частотой 667 МГц. И кастомизируемую программируемую логическую интегральную схему (ПЛИС) Xilinx, которую студенты смогут использовать для начала разработки систем и быстрого решения, встающих перед ними проблемами разработчика, в компактном, простом и красивом форм-факторе. NIMyRIOсодержит программируемый чип Zynq-7010, позволяющий в полную силу использовать возможности LabVIEW, как для приложений реального времени, так и для ПЛИС. Вместо долгих часов, затраченных на отладку кода или разработку пользовательского интерфейса, студенты смогут воспользоваться графическим подходом LabVIEWк программированию и сконцентрироваться на разработке, без дополнительного давления необходимости изучить среду разработки.
Лицевая панель виртуального прибора, посредством которого происходит управления шаговым двигателем, показана на рисунке 4.
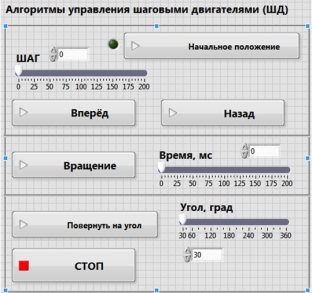
Рис. 4. Лицевая панель виртуального ШД
На рисунке 4 показан виртуальный прибор, посредством которого происходит управление шаговым двигателем, согласно алгоритму, заложенному при нажатии на кнопку.
Кнопка «Начальное положение» — возвращает ШД в начальное положение отсчета угла.
Кнопки «Вперед», «Назад» — позволяют осуществить режим шага вала на заданный шаг который устанавливается бегунком «ШАГ».
Кнопка «Вращение» — позволяет вращать ротор ЩД с заданной скоростью которая устанавливается бегунком «Время, мс».
Кнопка «Повернуть на угол» — позиционирует стрелку на валу ШД на заданный угол, который задается бегунком «Угол, град».
Кнопка «Стоп» — прекращает работу управляющей программы и останавливает ШД.
Алгоритм работы программы основан на использовании конечного автомата. Каждая кнопка — это событие, на которое должна реагировать программа.
Пример блок схемы программы управления ШД показан на рисунке 5.
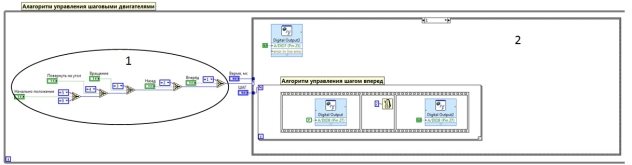
Рис. 5. Блок диаграмма программы управления ШД
Из рисунка 5 можно понять алгоритм работы программы на примере состояния автомата «алгоритм управления шагом вперед». Цифра 1 рис.5 задает работу переключения состояния, а цифра 2 организует структуру «Case ". Таким образом если рассмотреть событие при нажатии на кнопку «Вперед» и выставить требуемый «ШАГ», сработает событие под цифрой "1", затем выбираться состояния соответствующее "1" в Case структуре и ШД сделает требуемое число шагов.

Рис. 6. Разработанный лабораторный стенд по изучению ШД
Результатом работы стал разработанный лабораторный стенд рис. 6. по изучению работы ШД, позволяющий в полной степени ознакомится с принципом работы и позиционирования ШД.
Подведя итог можно сделать следующие выводы:
платформа NIMyRIO довольно быстро сокращает время на апробацию алгоритмов управления,
NIMyRIO обладает хорошим быстродействием,
если есть детерминированные задачи, то данная платформа хорошо подходит,
компания NI постаралась вместить в ПО как можно больше готовых программных функций (ШИМ, работа с последовательными интерфейсами, блок работы с энкодером и т. д.),
NIMyRIO поможет подготовить студентам хорошие апробированные дипломные проекты.
Литература:
- Ульянов А. В. Совершенствование электромеханических систем газомагнитных опор высокоскоростных роторов для повышения эффективности их работы // Молодые ученые — Хабаровскому краю материалы ХVII краевого конкурса молодых ученых и аспирантов. — Хабаровск: 2015. — С. 254–257.
- Ульянов А. В. Система управления активно управляемой газомагнитной опорой // Современные тенденции технических наук Материалы III Международной научной конференции. — Казань: Молодой ученый, 2014. — С. 49–52.
- Ульянов А. В., Копытов С. М., Стельмащук С. В. Математическая модель управляемой газомагнитной опоры // Электротехнические комплексы и системы управления. — 2014. — № 3. — С. 16–20.
- Пат. 119872 Российская Федерация, МКП7G 01 C 9/06. Оптический измеритель качки модели судна / Копытов С. М., Ульянов А. В.; заявитель и патентообладатель ФГБОУ ВПО КнАГТУ. — № 119872; заявл. 09.12.2011; опубл. 27.08.2012
- Ульянов А. В., Коваленко М. В. Использование СПК207 для управления привода ОВЕН ПЧВ3 по протоколу ModbusRTU // Молодой ученый. — 2016. — № 5.
Похожие статьи
Разработка алгоритма получения вибрационных характеристик...
Рис. 4. Лицевая панель виртуального ШД. шаговый двигатель, WINDING, STEP, DIRECTION, COMMON, LABVIEW, GND, виртуальный прибор, графическое программирование, лицевая панель.
Управление шаговым двигателем с использованием...
Управление шаговым двигателем с использованием микроконтроллера ATmega16 и LabVIEW.
Пример программы оправки кода 0x41 приведен в среде графического программирования LabVIEW и показан на рисунке 3.
Применение LabView при реализации виртуальных...
Концепция виртуальных устройств LabView строится на графическом программировании. Создание программы происходит одновременно в двух окнах, одно из которых называется «лицевая панель» и содержит элементы управления (переключатели...
Математическое моделирование электропривода на базе...
Основные термины (генерируются автоматически): шаговый двигатель, DIR, STEP, гибридный шаговый двигатель, TBLA, TBLB, блок, параметр блоков, NOT, математическое
Подключение шагового двигателя. Контакт 3 WINDING A Начало первой (А) обмотки ШД.
Создание приложений «Генератор» и «Осциллограф» для работы...
Графический код программы «Генератор» написанный на LabVIEW преведен на рисунке 5.
Программирование синусоидального и пилообразного сигналов...
Панель контрольно-измерительных приборов содержит цифровой мультиметр, функциональный генератор...
Комплекс электронных лабораторных установок как...
Предметом исследования являются электронные лабораторные работы в виртуальной среде программирования LabVIEW.
‒ создавать программы LabVIEW, именуемые виртуальными приборами (ВП)
‒ создавать оригинальные графические интерфейсы пользователя
Разработка алгоритма дистанционного управления...
Ключевые слова:робототехника, промышленный манипулятор, дистанционное управление, графическая среда программирования, виртуальный прибор.
Рис. 2. Лицевая панель, описывающая внешний интерфейс виртуального прибора.
Принципы автоматики и микроконтроллера как измерительного...
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW.
Ключевые слова: шаговый двигатель, контроллер NIMyRIO, виртуальный прибор.
Исследование лабораторного стенда National Instruments ELVIS II+
Загрузите программу ‘Lab8(M5).vi’. Вы увидите лицевую панель виртуального прибора (рис.3).
Рис. 3. Лицевая панель виртуального прибора.
На графических индикаторах ‘Входная ВАХ’ и ‘Выходные ВАХ’ на лицевой панели виртуального прибора будут построены...
Похожие статьи
Разработка алгоритма получения вибрационных характеристик...
Рис. 4. Лицевая панель виртуального ШД. шаговый двигатель, WINDING, STEP, DIRECTION, COMMON, LABVIEW, GND, виртуальный прибор, графическое программирование, лицевая панель.
Управление шаговым двигателем с использованием...
Управление шаговым двигателем с использованием микроконтроллера ATmega16 и LabVIEW.
Пример программы оправки кода 0x41 приведен в среде графического программирования LabVIEW и показан на рисунке 3.
Применение LabView при реализации виртуальных...
Концепция виртуальных устройств LabView строится на графическом программировании. Создание программы происходит одновременно в двух окнах, одно из которых называется «лицевая панель» и содержит элементы управления (переключатели...
Математическое моделирование электропривода на базе...
Основные термины (генерируются автоматически): шаговый двигатель, DIR, STEP, гибридный шаговый двигатель, TBLA, TBLB, блок, параметр блоков, NOT, математическое
Подключение шагового двигателя. Контакт 3 WINDING A Начало первой (А) обмотки ШД.
Создание приложений «Генератор» и «Осциллограф» для работы...
Графический код программы «Генератор» написанный на LabVIEW преведен на рисунке 5.
Программирование синусоидального и пилообразного сигналов...
Панель контрольно-измерительных приборов содержит цифровой мультиметр, функциональный генератор...
Комплекс электронных лабораторных установок как...
Предметом исследования являются электронные лабораторные работы в виртуальной среде программирования LabVIEW.
‒ создавать программы LabVIEW, именуемые виртуальными приборами (ВП)
‒ создавать оригинальные графические интерфейсы пользователя
Разработка алгоритма дистанционного управления...
Ключевые слова:робототехника, промышленный манипулятор, дистанционное управление, графическая среда программирования, виртуальный прибор.
Рис. 2. Лицевая панель, описывающая внешний интерфейс виртуального прибора.
Принципы автоматики и микроконтроллера как измерительного...
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW.
Ключевые слова: шаговый двигатель, контроллер NIMyRIO, виртуальный прибор.
Исследование лабораторного стенда National Instruments ELVIS II+
Загрузите программу ‘Lab8(M5).vi’. Вы увидите лицевую панель виртуального прибора (рис.3).
Рис. 3. Лицевая панель виртуального прибора.
На графических индикаторах ‘Входная ВАХ’ и ‘Выходные ВАХ’ на лицевой панели виртуального прибора будут построены...




