




Математическое моделирование метода покоординатного контроля контактных характеристик автомобиля во время поворота при учете погодных факторов
Авторы: Щуровский Владислав Анатольевич, Береснев Алексей Леонидович, Береснев Максим Алексеевич
Рубрика: 9. Транспорт
Опубликовано в
V международная научная конференция «Технические науки в России и за рубежом» (Москва, январь 2016)
Дата публикации: 06.01.2016
Статья просмотрена: 124 раза
Библиографическое описание:
Щуровский, В. А. Математическое моделирование метода покоординатного контроля контактных характеристик автомобиля во время поворота при учете погодных факторов / В. А. Щуровский, А. Л. Береснев, М. А. Береснев. — Текст : непосредственный // Технические науки в России и за рубежом : материалы V Междунар. науч. конф. (г. Москва, январь 2016 г.). — Москва : Буки-Веди, 2016. — С. 59-63. — URL: https://moluch.ru/conf/tech/archive/164/9474/ (дата обращения: 23.04.2024).
В статье рассмотрен основной принцип безопасного прохождения автомобилем поворотов, основанный на природных и механических силах, действующих на автомобиль при изменении направления его движения. А также предотвращение аварийноопасных ситуаций путем расчёта безопасной скорости движения автомобиля в повороте и заблаговременного безопасного снижения скорости автомобиля, при движении по прямой, еще до начала маневра.
В статье смоделировано влияние погодных факторов на безопасную скорость движения автомобиля. Рассмотрены основные требования к безопасному управлению автомобиля при движении. В статье приведены графики движения автомобиля, полученные при моделировании в программе mathcad версии 15.0.
В статье определяется безопасная скорость движения легкового автомобиля класса В, с давлением в шинах 2,3 атм., вовремя перемещения автомобиля по прямой, а также в повороте. В городских условиях, с ровным асфальтированным дорожным покрытием, в зависимости от таких погодных условий как, нормальные погодные условия (температура 200 С без осадков, влажность 60–70 %), дождь, туман и снег. Сила ветра и центр тяжести автомобиля не учитываются. ([1, с. 25]).
За последний (2015) год более 32 % аварий в России произошло в связи с влиянием погодных факторов, и недостаточной подготовленностью водителей к ним (Рисунок 1). [1] Задача данной статьи описать влияние основных погодных факторов, таких как, дождь, туман и снег, на коэффициент сцепления шин с дорожным покрытием,а также определить влияние коэффициента сцепления шин с дорожным покрытием (µ) и траектории движения автомобиля, на безопасную скорость движения автомобиля.
В статье рассматривается безопасная скорость движения легкового автомобиля класса В, во время прохождения автомобилем поворота. в городских условиях, с ровным асфальтированным дорожным покрытием, в зависимости от разных погодных условий. Сила ветра и центр тяжести автомобиля не учитываются.

Рис. 1. Круговой график процентного соотношения причин возникновения ДТП на территории РФ за 2015 год
Также рассматривается оптимальное расстояние от начала торможения до начала угла поворота, для безопасного снижения скорости до безопасной скорости движения легкового автомобиля класса В, во время прохождения автомобилем поворота. в городских условиях, с ровным асфальтированным дорожным покрытием, в зависимости от разных погодных условий. Сила ветра и центр тяжести автомобиля не учитываются.
Основой безопасного прохождения поворота является скорость с которой автомобиль входит в поворот, а также скорость с которой автомобиль продет поворот. Безопасная скорость прохождения поворота прямо пропорционально зависит от радиуса кривизны R траектории движения в повороте, а также от коэффициента сцепления шин автомобиля с дорожным покрытием µ. Который, в свою очередь, зависит как от погодных факторов, так и от типа дорожного покрытия (Таблица 1).
Таблица 1.
Значения коэффициента сцепления в зависимости от состояния и вида дорожного покрытия
|
Вид дорожного покрытия |
Состояние покрытия |
Коэффициент сцепления (µ) |
|
|
сухой |
0,7 ÷ 0,8 |
|
Асфальт, бетон |
мокрый |
0,5 ÷ 0,6 |
|
|
грязный |
0,25÷0,45 |
|
Булыжник, |
сухие |
0,6 ÷ 0,7 |
|
брусчатка |
мокрые |
0,4 ÷ 0,5 |
|
|
сухая |
0,5 ÷ 0,6 |
|
Грунтовая дорога |
мокрая |
0,2 ÷ 0,4 |
|
|
грязная |
0,15 ÷ 0,30 |
|
Песок |
влажный |
0,4 ÷0,5 |
|
|
сухой |
0,2 ÷ 0,3 |
|
Асфальт, бетон |
обледенелые |
0,09 ÷ 0,10 |
|
Укатанный снег |
обледенелый |
0,12 ÷ 0,15 |
|
Укатанный снег |
без ледяной корки |
0,22 ÷ 0,25 |
|
Укатанный снег |
обледенелый, после россыпи песка |
0,17 ÷ 0,26 |
Тип дорожного покрытия определяется коэффициентом сцепления µ, значения которого в обычных условиях варьируется от 0.7–0.9 для сухого асфальта и хорошей резины до 0.03–0.01 на льду. Безопасную скорость движения автомобиля V, при прохождении поворота можно рассчитать по формуле: V=√(µgR), где g = 9.8 (Рисунок 3).
Расчет оптимального расстояния S от начала торможения до начала угла поворота, для безопасного снижения скорости до безопасной скорости движения легкового автомобиля можно провести по формуле: V12–V22=2µgS, где V1 — скорость автомобиля до начала торможения, V2 — скорость автомобиля в конце торможения.
Принцип работы системы автоматического контроля управления автомобиля во время поворота следующий (Рисунок 2). Навигатор считывает данные о местоположении автомобиля в пространстве и сверяет их с картами, затем водитель вводит конечную точку маршрута в навигатор. Теперь системе известен путь, а именно совокупность прямых и поворотных участков пути, а также радиус поворота, каждого из поворотных участков пути.
Далее система считывает информацию о дорожной ситуации с датчиков, проанализировав информацию система принимает решение.
Если скорость движения автомобиля безопасная система продолжает работать в прежнем режиме, но в случае превышения безопасной скорости, система подает сигнал на исполнительные устройства и в принудительном порядке снижает скорость движения автомобиля до безопасной.
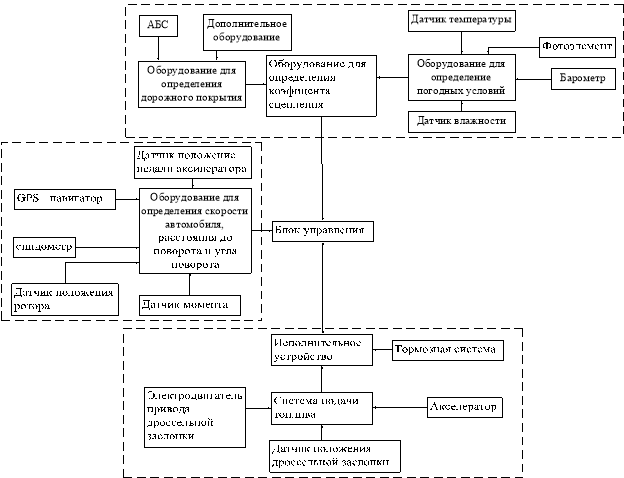
Рис. 2. Структурная схема работы системы автоматического контроля управления автомобиля во время поворота
Безопасная скорость будет меняться в зависимости от дорожной ситуации (Рисунок 3).
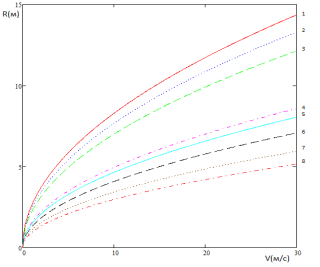
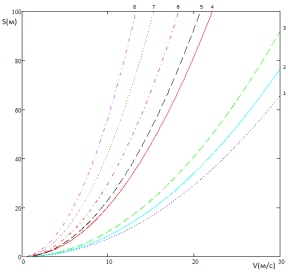
Рис. 3. Слева: график зависимости тормозного пути (S) от скорости автомобиля (V). Справа: график зависимости безопасной скорости движения автомобиля (V) от радиуса кривизны поворота (R) и состояния дорожного покрытия: 1 — сухой асфальт, 2 — влажный асфальт, 3 — мокрый асфальт, 4 — грязный асфальт, 5 — укатанный снег без ледяной корки, 6 — укатанный снег обледенелый после россыпи песка, 7 — укатанный снег обледенелый, 8 — асфальт обледенелый
В данной статье были приведены графики, моделирующие автомобиль при движении, под влиянием погодных факторов.
Заключение:
1) предложена структурная схема системы покоординатного контроля контактных характеристик автомобиля в повороте;
2) описано влияние основных погодных факторов на коэффициент сцепления шин с дорожным покрытием;
3) рассмотрен принцип работы системы покоординатного контроля контактных характеристик автомобиля в повороте и обоснован его практический смысл;
4) приведена математическая модель расчетов контактных характеристик микро профиля дорожного покрытия, в зависимости от погодных факторов;
5) исследованы контактные характеристики различных типов микро профиля дорожного покрытия, во время поворота и на прямой.
Литература:
- Пшихопов В. Х., Медведев М. Ю. Оценивание и управление в сложных динамических системах. — М.: Физматлит, 2009.
- Щуровский В. А. Математическое моделирование системы безопасного управления автомобилем в повороте // Инновации в сфере жизнедеятельности человека XXI века», Ростов-н/Д Изд-во Юнеско. 2015.
Похожие статьи
Расчет виража с целью повышения безопасности движения на...
-скорость автомобиля; -ускорение силы тяжести
При малом радиусе (R) кривой и большой скорости движения автомобиля ( ) под действием центробежной силы (C) может произойти занос автомобиля.
Влияние психофизиологических особенностей водителей на...
Повышение интенсивности дорожного потока, скоростей движения, необходимость частого выполнения маневрирования, присутствие на дороге. Подавляющее большинство таких аварий происходят по вине водителей автобусов, либо других транспортных средств.
Исследование долговечности дорожной горизонтальной разметки...
Обеспечение безопасности дорожного движения является народнохозяйственной задачей.
где И – износ разметки; N – нагрузка на ось автомобиля.
Время высыхания покрытия составило 15 мин, толщина слоя 0,4-0,6 мм.
Конспект урока по физике для 7 класса по теме «Сила трения»
Выбирая последовательно различные виды дорожного покрытия (сухой асфальт, мокрая дорога, укатанный снег, обледенелая
Полученные данные отразите в таблице. Таблица 1. Зависимость тормозного пути автомобиля от скорости движения идорожного покрытия.
Влияние конструкции автомобилей на безопасность пешеходов
1. Соотношения высот воздействия результирующей силы автомобиля и центра масс пешехода.
Принимая во внимание состояние движения автомобиля, можно определить длину линии от
Соответственно, именно ее можно рекомендовать как наиболее безопасную.
Оценка влияния на скорость ветрового потока придорожных...
Замеры скорости ветра в каждой точке проводились с такой периодичностью, чтобы наиболее точно зафиксировать каждый последующий порыв ветра.
Движение ветрового потока осуществляется по направлению от точки «1» к точке «9» (заветренная сторона).
Оценка безопасности движения на пересечениях автомобильных...
Все это влияет на снижение эффективности использования транспортных средств, скорость движения автомобилей.
Обеспечение безопасности дорожного движения — деятельность, направленная на предупреждение причин возникновения дорожно-транспортных...
Методы повышения пропускной способности дорог
Совершенствование организации дорожного движения на участке... Ключевые слова: организация дорожного движения, координированное управление, скорость транспортного потока, время задержки.
Улучшение устойчивости транспортного средства с повышенным...
-скорость автомобиля; -ускорение силы тяжести.
-скорость автомобиля; -ускорение силы тяжести. Тогда, поперечная сила, сдвигающая автомобиль.
Устойчивость движения автомобиля зависит от многих факторов и параметров.
Похожие статьи
Расчет виража с целью повышения безопасности движения на...
-скорость автомобиля; -ускорение силы тяжести
При малом радиусе (R) кривой и большой скорости движения автомобиля ( ) под действием центробежной силы (C) может произойти занос автомобиля.
Влияние психофизиологических особенностей водителей на...
Повышение интенсивности дорожного потока, скоростей движения, необходимость частого выполнения маневрирования, присутствие на дороге. Подавляющее большинство таких аварий происходят по вине водителей автобусов, либо других транспортных средств.
Исследование долговечности дорожной горизонтальной разметки...
Обеспечение безопасности дорожного движения является народнохозяйственной задачей.
где И – износ разметки; N – нагрузка на ось автомобиля.
Время высыхания покрытия составило 15 мин, толщина слоя 0,4-0,6 мм.
Конспект урока по физике для 7 класса по теме «Сила трения»
Выбирая последовательно различные виды дорожного покрытия (сухой асфальт, мокрая дорога, укатанный снег, обледенелая
Полученные данные отразите в таблице. Таблица 1. Зависимость тормозного пути автомобиля от скорости движения идорожного покрытия.
Влияние конструкции автомобилей на безопасность пешеходов
1. Соотношения высот воздействия результирующей силы автомобиля и центра масс пешехода.
Принимая во внимание состояние движения автомобиля, можно определить длину линии от
Соответственно, именно ее можно рекомендовать как наиболее безопасную.
Оценка влияния на скорость ветрового потока придорожных...
Замеры скорости ветра в каждой точке проводились с такой периодичностью, чтобы наиболее точно зафиксировать каждый последующий порыв ветра.
Движение ветрового потока осуществляется по направлению от точки «1» к точке «9» (заветренная сторона).
Оценка безопасности движения на пересечениях автомобильных...
Все это влияет на снижение эффективности использования транспортных средств, скорость движения автомобилей.
Обеспечение безопасности дорожного движения — деятельность, направленная на предупреждение причин возникновения дорожно-транспортных...
Методы повышения пропускной способности дорог
Совершенствование организации дорожного движения на участке... Ключевые слова: организация дорожного движения, координированное управление, скорость транспортного потока, время задержки.
Улучшение устойчивости транспортного средства с повышенным...
-скорость автомобиля; -ускорение силы тяжести.
-скорость автомобиля; -ускорение силы тяжести. Тогда, поперечная сила, сдвигающая автомобиль.
Устойчивость движения автомобиля зависит от многих факторов и параметров.




