




Система синхронизации по абсолютному точному времени

Авторы: Сало Антон Андреевич, Садыков Жанат Булатович, Цымбалова Екатерина Игоревна
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
III международная научная конференция «Актуальные вопросы технических наук» (Пермь, апрель 2015)
Дата публикации: 03.04.2015
Статья просмотрена: 1851 раз
Библиографическое описание:
Сало, А. А. Система синхронизации по абсолютному точному времени / А. А. Сало, Ж. Б. Садыков, Е. И. Цымбалова. — Текст : непосредственный // Актуальные вопросы технических наук : материалы III Междунар. науч. конф. (г. Пермь, апрель 2015 г.). — Пермь : Зебра, 2015. — С. 54-57. — URL: https://moluch.ru/conf/tech/archive/125/7792/ (дата обращения: 24.04.2024).
Главной задачей синхронизации цифровой сети является гарантированное получение одинаковой скорости передачи и приема информации в сетях, а также не допустить, так называемых, «проскальзываний». Существуют две основные схемы распределения синхросигналов. Наиболее распространенная основывается на системах передачи на плезенхронной цифровой иерархии (ПЦИ) или на синхронной цифровой иерархии (СЦИ). Эта схема распределения имеет иерархическую архитектуру «ведущий-ведомый». Другая схема использует сигналы глобальных спутниковых навигационных систем, таких как GPS и ГЛОНАСС.
Спутниковая система распределяет всемирное координированное время (UTC), частоту всем местным генераторам и обеспечивает получение небольших блужданий, легко поддается изменениям и развитию.
В радиотехнике синхронизацией называют процесс подстройки значащих моментов цифрового сигнала для установления и поддержания требуемых временных соотношений, это же понятие в теории колебаний подразумевает процесс установления и поддержания режима колебаний двух и более связанных осцилляторов, частоты которых совпадают или же кратны. [1] Синхронизация может быть взаимной и принудительной. Взаимная синхронизация появляется в результате того, что в двух связанных системах, кроме собственных колебаний, возникают вынужденные — за счет второй системы. Принудительная синхронизация обеспечивается в системах связи внешними сигналами станций точного времени или сигналами внутреннего высокостабильного эталона частоты.
Существуют виды синхронизации [2]:
1. Фазовая (фаза принимаемого высокочастотного несущего колебания определена);
Такая синхронизация нашла применение в частотной модуляции и демодуляции, умножения и преобразования частоты, частотной фильтрации и др. [3]
2. Тактовая (временные границы принимаемых элементов определены);
Для реализации тактовой синхронизации в преамбулу сообщения включают продолжительный фрагмент сигнала, что увеличивает продолжительность сеанса связи и уменьшает скорость передачи сообщения.
3. Цикловая (определяет моменты времени начала кодовых знаков);
Цикловая синхронизация обеспечивает определение начала кодовых слов. Она увеличения продолжительности сеанса связи (уменьшает скорость передачи сообщения).
4. Кадровая (определяет моменты времени начала и конца групповых пакетов);
Такая синхронизация применяется в многоканальных системах с временным уплотнением и обеспечивается кадровыми синхрословами в начале отдельного кадра.
5. Сеансовая (определяет моменты времени начала и конца передаваемых сообщений).
Сеансовая синхронизация реализуется за счет вызывных сигналов или принудительным использованием абсолютного общемирового времени. Обыкновенно сигналы тактовой, кадровой и цикловой синхронизации связаны по фазе. Частоту повторения кодовых слов fц возможно определить по формулам: fц= f/ n, fк= fц/ kсл, где f — тактовая частота, n — число разрядов в кодовом слове, fк — частота повторения кадров, fц — частота повторения кодовых слов, kсл — чисто кодовых слов в кадре.
Устройства синхронизации можно разделить на два типа. Первый тип предназначен для синхронизации отсчетов времени (фазовая и тактовая синхронизация), благодаря им создаются временные шкалы. Второй тип предназначен для устранения неоднозначности отсчетов времени при определении начала слова, кадра и сообщения. Принципиальное отличие типов устройств синхронизации отражается на методах поиска и оценки синхропараметров и качестве их работы. Качество работы определяется степенью соответствия фазы входного колебания и колебания местного генератора: до начала работы неопределенность в оценке фазы φ принимаемых синхроколебаний может быть задана плотностью распределения wвх(φ). При отсутствии дополнительной информации о параметре φ можно сделать предположение, что закон распределения wвх(φ) — равномерный на интервале [-π;π]. В результате работы системы синхронизации неопределенность уменьшается поэтапно.
Тактовую синхронизацию можно осуществить несколькими способами. В первом случае, когда таймеры приемника и передатчика синхронизированы по образцовому таймеру, приемник должен оценить и скомпенсировать лишь относительное время задержки между переданным и принятым сигналами. Этот метод используют в низкочастотных (< 30 кГц) системах радиосвязи, где сигналы точного времени посылаются эталонной станцией точного времени. [4] На более высоких частотах КВ и УКВ используются более высокие скорости передачи, при которых длительности элементов сравнимы или меньшей разности возможных времен распространения сигнала по каналу связи, здесь метод тактовой синхронизации в абсолютном времени быть использован не может.
В основе второго метода для радиоустройств, эксплуатирующих высокие частоты, лежит использование одновременной передачи таймерной частоты, равной или кратной 1/Т (Т — символьный интервал) и информационного сигнала. Приемник использует узкополосный фильтр, настроенный на переданную таймерную частоту, чтобы извлечь сигнал для стробирования. К минусам этого метода относятся: необходимость в дополнительной мощности передатчика, занятие некоторой полосы частот в канале для передачи таймерного сигнала. Этот метод тактовой синхронизации применяется в системах телефонной связи. Эти системы используют широкие полосы частот для передачи сигналов большого количества пользователей, на которых делятся затраты передачи таймерного сигнала.
Еще один метод тактовой синхронизации заключается в том, чтобы извлечь информацию о местоположении тактовых импульсов из принимаемого сигнала. Это осуществляется устройством синхронизации и регенерации сигнала. К недостаткам такого метода следует отнести время для вхождения в синхроизм и случайное отклонение моментов принятия решения о значении элемента при небольших отношениях сигнал/шум. [4]
Одним из способов цикловой и кадровой синхронизации является введение маркера. Маркер — это отдельный бит или их короткая последовательность, периодически вводимая передатчиком в поток данных. Зная эту последовательность и период ее передачи, приемник определяет корреляцию с присутствующей копией и путем подстройки достигает наибольшего значения этой корреляции. В этом случае увеличивается время передачи сообщения.
Так же для цикловой и кадровой синхронизации применяются длинные синхронизирующие кодовые слова (последовательности Баркера или Уилларда). Они передаются частью заголовка сообщения, имеют малое абсолютное значение побочных максимумов корреляции, это увеличивает время передачи сообщения.
Кадровая синхронизация может обеспечиваться принудительно без специально передаваемых сигналов, используя высокостабильные опорные генераторы, которые синхронизируются системами абсолютных всемирного или системного точного времени. Это сокращает время передачи и предохраняет от возможных ошибок систем синхронизации.
Спутниковая система навигации — комплексно электронно-техническая система, состоящая из совокупности наземного и космического оборудования, ее назначение — определение местоположения (географические координаты и высота) и параметров движения (скорость, направление и др.) для наземных, воздушных и водных объектов.
Принцип работы ССН заключается в измерении расстояния от антенны на объекте, координаты которого нужно получить, до спутников, положение которых известно с большей точностью. Каждый спутниковый приёмник имеет в себе альманах расположения спутников на орбите. Благодаря этому альманаху, можно вычислить положения объекта в пространстве. Чтобы измерить время распространения радиосигнала каждый спутник ССН излучает сигналы точного времени, используя синхронизированные с системным временем атомные часы. Часы спутникового приёмника синхронизируются с системным временем, далее вычисляется задержка между временем излучения и временем приёма сигнала. Затем приёмник вычисляет координаты антенны, а другие параметры вычисляются на основе измерения времени, затраченного объектом на перемещение между двумя и более точками с определёнными координатами.Метки точного времени на передающей и приёмной сторонах радиолинии формируются с помощью приёмников сигналов ГНСС ГЛОНАСС и GPS.
При принудительной тактовой и цикловой синхронизации с использованием абсолютного точного времени сокращается общее время передачи сообщения, так как не требуется внедрения дополнительной информации в сообщение для обеспечения тактовой синхронизации и сводится к минимуму неточность в моментах принятия решений о значениях принимаемых элементах.
Рассмотрим структурную схему одной из таких систем (рис.1):
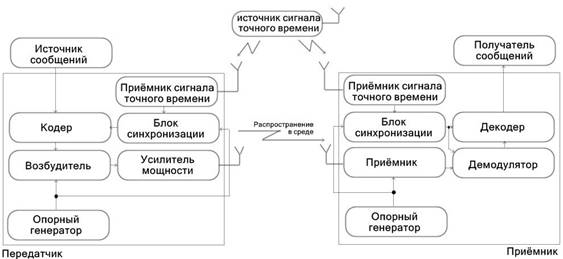
Рис.1. Структурная схема системы синхронизации по абсолютному точному времени
Система синхронизации, структурная схема которой изображена на рисунке 1 функционирует: с помощью приёмников сигналов станции точного времени сигнал от источника сигналов точного времени принимается на передающем и приёмном концах радиолинии и периодически приводит блоки синхронизации приёмника и передатчика, которые являются внутренними часами системы, в абсолютно одинаковое состояние. Опорные генераторы служат вторичными эталонами частоты передатчика и приёмника, обеспечивают требуемую стабильность собственных часов этих устройств между периодами синхронизации по сигналу станции точного времени. Информация от источника сообщения кодируется кодером с привязкой начала кодовой последовательности и временного положения границ элементов к абсолютному времени по тактовым импульсам, поступающим от блока синхронизации с учётом (или без учёта) времени распространения сигнала. Возбудители передатчика осуществляется манипуляция сигнала и преобразования его на рабочую частоту. Усилитель мощности передатчика обеспечивает согласование с антенно-фидерным трактом и излучение радиосигнала с заданным уровнем в эфир. Приёмник преобразует принимаемый сигнал по частоте и транслирует его на вход демодулятора, где с помощью тактовых импульсов, поступающих от блока синхронизации, производится оптимальная интегральная детектирование выносится решение о значении принимаемого элемента сообщения. С выхода демодулятора бинарная последовательность поступает на вход декодера, где с помощью импульсов цикловой синхронизации определяется начало кодовых комбинаций и производится декодирование принятого сообщения. С выхода декодера информация поступает к получателю сообщения [5].
Литература:
1. Трофимова Т. И. Курс физики./ Т. И. Трофимова 11-е изд., стер. — М.: Академия, 2006. — 560 с.
2. Пат.2007125107/09. Способ передачи дискретных сообщений по каналам радиосвязи/ В. Л. Хазан, Д. В. Д.В. Федосов (Россия). — № 2377723/25–06; Заявлено 02.07.2007; Опубл.27.12.2009. Бюл.№ 11,(Россия). — 14с.:ил.
3. Скляр Б Цифровая связь. Теоретические основы и практическое применение. / Б.Скляр.изд.2-ие испр.: Пер.с англ.-М.:«Вильямс», 2003.-1104с.:с ил.
4. Информационные технологии в радиотехнических системах. Под ред. Федорова И. Б., -М.: Изд-во МГТУим.Баумана, 2004.1109с.
5. Лебедев О. Т. Конструирование и расчет электронной аппаратуры на основе интегральных микросхем.-Л.:Машиностроение,1976г.
Похожие статьи
Одночастотные сети в цифровом стандарте DVB-T2
Синхронизация достигается благодаря сигналу частотой 1 Гц (1 pps — 1 импульс в секунду), принимаемого приемниками GPS.
Вся система может синхронизироваться по глобальному времени (GMT), и задержка может быть больше.
Технология захвата синхронизации для UWB сетей
Система синхронизации по абсолютному точному времени.
Анализ средств барьерной синхронизации | Статья в журнале... где – среднее время синхронизации; – комбинаторная гибкость средств синхронизации; – структурная сложность средств синхронизации...
Разработка формирователя сигнала высокоскоростной...
Система синхронизации по абсолютному точному времени.
Цикловая синхронизация обеспечивает определение начала кодовых слов.
Тактовая синхронизация — это процесс установления точного временного соответствия между принимаемым сигналом и...
Экспериментальное исследование сигналов первичной...
Система синхронизации по абсолютному точному времени.
Система синхронизации псевдослучайной последовательности... Экспериментальное исследование сигналов первичной и вторичной синхронизации физического уровня в сети LTE.
Математическое моделирование метода синхронизации...
Система синхронизации по абсолютному точному времени. Обыкновенно сигналы тактовой, кадровой и цикловой синхронизации связаны по фазе.
Система синхронизации псевдослучайной последовательности...
Наиболее интересным из них является система синхронизации сигналов на входе и выходе тестируемого канала.
Если 2 коротких интервала подряд, то передавалась 1; После принятия решения и в начале приема – ожидание короткого или длинного интервала
Анализ методов синхронизации устройств с источником...
Система синхронизации по абсолютному точному времени. Этот метод тактовой синхронизации применяется в системах телефонной связи. Эти системы используют широкие полосы частот для передачи сигналов большого количества пользователей...
Алгоритм формирования единого носителя при анализе...
Система синхронизации по абсолютному точному времени. Еще один метод тактовой синхронизации заключается в том, чтобы извлечь информацию о местоположении тактовых импульсов из принимаемого сигнала.
Основы спутниковой навигации | Статья в журнале...
Спутниковые системы навигации также позволяют получить скорости и направления движенияприемника сигнала. Кроме того могут использоваться для получения точного времени.
Похожие статьи
Одночастотные сети в цифровом стандарте DVB-T2
Синхронизация достигается благодаря сигналу частотой 1 Гц (1 pps — 1 импульс в секунду), принимаемого приемниками GPS.
Вся система может синхронизироваться по глобальному времени (GMT), и задержка может быть больше.
Технология захвата синхронизации для UWB сетей
Система синхронизации по абсолютному точному времени.
Анализ средств барьерной синхронизации | Статья в журнале... где – среднее время синхронизации; – комбинаторная гибкость средств синхронизации; – структурная сложность средств синхронизации...
Разработка формирователя сигнала высокоскоростной...
Система синхронизации по абсолютному точному времени.
Цикловая синхронизация обеспечивает определение начала кодовых слов.
Тактовая синхронизация — это процесс установления точного временного соответствия между принимаемым сигналом и...
Экспериментальное исследование сигналов первичной...
Система синхронизации по абсолютному точному времени.
Система синхронизации псевдослучайной последовательности... Экспериментальное исследование сигналов первичной и вторичной синхронизации физического уровня в сети LTE.
Математическое моделирование метода синхронизации...
Система синхронизации по абсолютному точному времени. Обыкновенно сигналы тактовой, кадровой и цикловой синхронизации связаны по фазе.
Система синхронизации псевдослучайной последовательности...
Наиболее интересным из них является система синхронизации сигналов на входе и выходе тестируемого канала.
Если 2 коротких интервала подряд, то передавалась 1; После принятия решения и в начале приема – ожидание короткого или длинного интервала
Анализ методов синхронизации устройств с источником...
Система синхронизации по абсолютному точному времени. Этот метод тактовой синхронизации применяется в системах телефонной связи. Эти системы используют широкие полосы частот для передачи сигналов большого количества пользователей...
Алгоритм формирования единого носителя при анализе...
Система синхронизации по абсолютному точному времени. Еще один метод тактовой синхронизации заключается в том, чтобы извлечь информацию о местоположении тактовых импульсов из принимаемого сигнала.
Основы спутниковой навигации | Статья в журнале...
Спутниковые системы навигации также позволяют получить скорости и направления движенияприемника сигнала. Кроме того могут использоваться для получения точного времени.




