




Одним из приоритетных направлений развития станкоинструментальной промышленности является создание технологического оборудования для новых высокоэффективных процессов обработки. Прогрессивность новых способов оценивается степенью реализации в них основных направлений повышения эффективности, одним из которых является получение сложного профиля детали.
В настоящее время в авиационном машиностроении, при производстве космической техники, в судостроении, энергетике, при изготовлении сложной бытовой техники широко используются детали, имеющие поверхности сложной формы. Формообразование сложных поверхностей – весьма серьёзная инженерная: проблема, вызванная многоплановостью задач по обеспечению высокой производительности обработки и достижению заданного её качества и точности формообразованных поверхностей.
В современной промышленности на роботизированных предприятиях существует множество технологических процессов требующих высокой манёвренности исполнительных механизмов(манипуляторов). Как правило, устройства, обладающие высокой степенью маневренности, отличаются низкой жесткостью и точностью позиционирования.
Как решение специфических задач машиностроения, требующих высокой степени подвижности исполнительных механизмов предлагается манипулятор многозвенной конструкции, с высокой степенью маневренности, под рабочим названием Living Stick (Палочник). В статье представлена конструкция манипулятора, дано принципиальное устройство, область применения, рассмотрена математика движения, в том числе основные уравнения позиционирования. Приведен проект создания рабочей модели с описанием основных устройств и узлов манипулятора.
1. Теоретические основы. Обзор основных конструкций технологических манипуляторов
В современном мире мало какую сферу жизни можно представить без автоматизированных систем, в промышленности таких сфер и вовсе не найдется. Вершиной таких систем являются роботизированные предприятия, основа которых – промышленные манипуляторы. Манипулятор – механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Промышленный робот – автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенная для замены человека при выполнении основных и вспомогательных операций в производственных процессах.
Девяносто процентов манипуляторов в мире работают на промышленных предприятиях в сборочных и других технологических цехах. Этот факт и определяет основные конструкции и возможности подобных систем.
Манипуляторы удобно классифицировать по системе координат, в которой они работают, что также определяет конструкцию и устройства: робот с прямоугольной системой координат, робот с вращающейся системой координат, робот SCARA, робот с полярной системой координат, запястный шарнир и т.д.
Робот Spine. Эта система оригинальной конструкции (рис. 1) состоит из основания и манипулятора, который разделен на нижнюю и верхнюю секции, причем эти секции могут двигаться независимо друг от друга.
Такой гибкий манипулятор состоит из множества чечевицеобразных дисков из нержавеющей стали, которые соединены между собой двумя парами тросов, обеспечивающих натяжение. Тросы соединены с поршнями гидравлических цилиндров, которые, создавая натяжение, вызывают перемещения манипулятора. Специальные датчики передают на систему управления информацию о положении манипулятора и его кисти. Обладая значительным радиусом действия и высокой маневренностью, подобный робот способен добираться до таких точек обрабатываемого объекта, которые недоступны обычным установкам; в частности, он может выполнять окраску внутренних частей автомобильного кузова. По утверждению изготовителей, роботы типа Spine по гибкости и дальности действий превосходят все другие подобные системы.
Как можно заметить, манипуляторы типа Spine представляют собой наиболее маневренную конструкцию, практически не имеющую конкурентов. Маневренность манипулятора – число степеней подвижности манипуляционной системы при фиксированном положении рабочего органа, является важной характеристикой, определяющей возможность обхода «рукой» робота препятствий в рабочей зоне и способность манипулятора к выполнению сложных операций.
Однако можно отметить ряд недостатков подобных систем:
- малый максимальный вес рабочего органа;
- инертность манипулятора, особенно при быстрых перемещениях;
- опрокидывание части тела манипулятора, при перемещении центра масс на сторону «ослабленных» тросов;
- невысокая точность;
- сложность в управлении.
МАНИПУЛЯТОР LIVINGSTICK
Принципиальное устройство
В качестве конструкции манипулятора высокой маневренности предлагается манипулятор типа Living Stick (Палочник) (рис. 2).
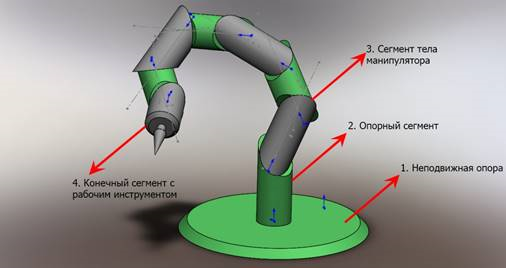
Рис.2. Общий вид манипулятора Living Stick
Манипулятор состоит из неподвижной опоры, на которой крепится опорный сегмент, способный вращаться (по средствам электродвигателя, или др. устройства) вокруг своей оси. К опорному сегменту крепится тело манипулятора, представляющее собой набор сегментов цилиндрической формы, каждый из которых способен вращаться вокруг оси, проходящей под углом 45 градусов относительно оси симметрии нижестоящего сегмента.
Достаточно собрать тело, состоящее из трех сегментов, что бы получить манипулятор, работающий в пространственной системе координат. Остальное тело используется для доставки этой системы координат в необходимую точку пространства. Так как сегменты манипулятора абсолютно идентичны друг другу, наращивание длинны, а как следствие расширение его рабочей зоны, не представляет особого труда. Количество сегментов (рис. 3) определяется необходимым уровнем манёвренности и конкретной технологической задачей.
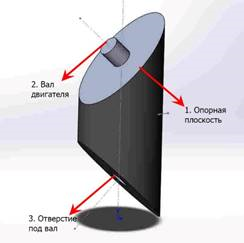
Рис. 3. Общий вид сегмента тела манипулятора Living Stick
Важной особенностью манипулятора является расположение осей вращения сегментов, перпендикулярно плоскости под 45 градусов, относительно оси симметрии сегмента. Эта плоскость выступает опорой, на которую приходится основная масса вышележащего тела, и обеспечивает дополнительную жёсткость. Благодаря этой особенности, рабочий орган способен нести больший вес, чем например подобная конструкция, собранная на шарнирах, или просто без подобной плоскости.
Благодаря подобной конструкции манипулятор может работать в стесненных условиях, где другие устройства просто не смогут перемещаться, в виду больших плеч рычагов. Такие устройства могут использоваться в роботизированных ремонтных комплексах в атомной энергетике или нефтегазовой промышленности, в контрольно-измерительных машинах, в машиностроении для технологических процессов, связанных со сложным формообразованием, в сборочных линиях (например, для работ внутри кузова автомобиля), для сварных работ с внутренней части трубопровода и других операций, требующих высокой гибкости тела манипуляторов и широких возможностей обхода препятствий.
Математика движения.
Траектория движения манипулятора отличается от популярных конструкций Доступная зона, в которой движется рабочий орган, нечто среднее между цилиндрической и сферической системой координат. Так как трех сегментов достаточно для пространственного перемещения, определим значение угла каждого сегмента для перемещения в заданную точку координат в декартовой системе:
φ1= arctg(
φ2= arctg( )
)
φ3= arctg( )
)
Так же необходимо учитывать, что ось Y данной декартовой систему, находится под углом в 45 градусов от центральной оси симметрии тела манипулятора.
Движение остального тела манипулятора, удобно представлять как последовательность итераций, вышеописанных движений. Аппроксимировав пространственную траекторию конечных трех сегментов в точку, имеющую координаты (0,0,0) в этой системе, можно перемещать ее по окружности, плоскости или в новой пространственной системе координат, которая при следующей итерации так же аппроксимируется в точку.
3. МОДЕЛЬ
Разработан проект, определена спецификация и материалы для изготовления модели. В качестве рабочих приводов использовать серводвигатели CDS5500, управляемые через последовательный интерфейс. Система управления на основе контролера Arduino UNO и ЭВМ, корпусные детали выполнены из пластика по средствам 3D печати.
Для дальнейшего изучения и лучшего понимания возможностей манипулятора Living Stick (Палочник) создана рабочая модель (рис. 4, 5).
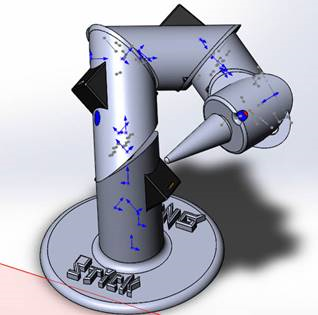
Рис. 4. Сборочный чертеж модели Living Stick
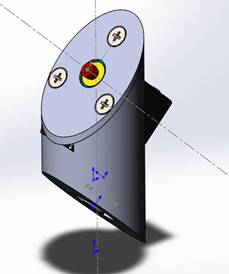
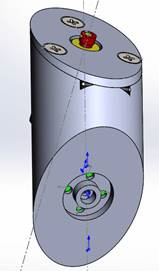
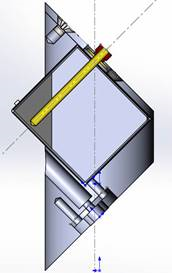
Рис. 5. Основной узел «Сегмент»
В ходе научно-исследовательской работы удалось добиться следующего:
- обозначены проблемы современного машиностроения связанные с сложным формообразованием и операциями требующими высокий манёвренности и жесткости исполнительных механизмов;
- рассмотрены основные конструкции технологических манипуляторов применяемых в промышленности;
- разработана принципиальное устройство многозвенного манипулятора высокой степени маневренности;
- рассчитаны рабочая зона манипулятора, даны уравнения для ее определения;
- поэтапно разобрана траектория движения манипулятора в пространственной системе координат;
- рассчитана начальная математика движения, и предложен принцип позиционирования многозвенного манипулятора;
- разработан проект рабочей модели, определена спецификация и материалы;
- создана рабочая модель;
- проведено патентное исследование и направлена заявка в патентный фонд, на регистрацию полезной модели.
Литература:
1. «Библиотека о робототехнике и кибернетике» [Электронный ресурс]// http://roboticslib.ru: «Электронная энциклопедия». – Режим доступа: http://roboticslib.ru/books/item/f00/s00/z0000006/st010.shtml/ (16.01.2015)
2. H.B. Василенко К.Д. Никитин В.П. Пономарёв А.Ю. Смолин ОСНОВЫ РОБОТОТЕХНИКИ, ТОМСК МГП «РАСКО» 1993
3. Справочный ресурс по микроконтроллерам линейки arduino [Электронный ресурс]// http://www.arduino.cc/ «Сайт фирмы производителя».
4. «Учебно-методический комплекс по Теории Механизмов и Машин» [Электронный ресурс]// http://tmm-umk.bmstu.ru/: «Учебно-методический ресурс кафедры РК-2 МГТУ им Баумена». – Режим доступа: http://tmm-umk.bmstu.ru/index_2.htm (16.01.2015)
