




В настоящий момент в связи с ростом цен на электроэнергию проблема энергосбережения стоит очень остро для осуществления водоподготовки. В рамках данной статьи будет рассматриваться метод оптимизации управления насосами, оборудованными частотными преобразователями для артезианских станций. Надо отдельного оговориться, что артезианскими скважинными мы называем скважины с глубиной от 30 и более метров, и с уровнем воды при эксплуатации на 20–30 метров ниже уровня земли. Хотя профессор А. Гаджи-Касумов считает, что артезианские — это скважины с «самоизливом» по названию французской провинции Артуа, где впервые был обнаружен этот феномен [1]
В структуре расходования электроэнергий затрачиваемой на подачу воды потребителю, затраты на первый подъем составляют от 20 до 50 % в зависимости от высоты конечного потребителя.
Потери энергий
Для начала рассмотрим затраты механической энергий необходимой для транспортировки воды из скважины до резервуара, из которого происходит питание насосных станций второго подъема. Затраты механической энергий можно разделить на затраты на подъем воды и затраты на преодоление сил трения при ее транспортировке.
Затраты на подъем зависят от уровня воды в скважине и высоты приемного резервуара. Таким образом, единственным изменяющим параметров является уровень воды, которой зависит от множества факторов. Рассмотрим устройство скважины, и так за точку отсчета мы возьмем минимальный уровень воды, при котором может работать насос H0, ниже этого уровня вы не можем выкачивать воду. Если насос не работает продолжительное время более 48 часов, уровень воды устанавливается равный H2 (статический уровень). Надо заметить, что если уровень H0 не зависит от внешних условий и его можно считать постоянным, то уровень H2 будет зависеть от множества факторов и иметь колебания в своих значениях до 3–5 метров в зависимости от количества осадкой и времени года. При работе насоса в скважине будет уровень H1 –динамический уровень, который в зависимости от производительности насоса будет принимать значения от H0 до H2. А это составляет порядка 15–20 метров, или 30–50 % от той высоты, на которую нужно поднять воду. Установит зависимость между уровнем воды и дебетом возможно только эмпирическим путем, и это зависимость будем периодически меняется, следовательно, данные необходимо будет периодически (каждые 10–20 суток) обновлять.
Затраты же на преодоления сил трения при транспортировке воды, для наших систем меньше затрат на подъем более чем в 10 раз. Снижения этих затрат возможно строительством больших по диаметру и обладающих меньшим сопротивлением трубопроводов. А так же при не равномерном расходе воды потребителем установкой большого буферного резервуара.
Рассматривая потери при перекачке, следует осветить потери на самом насосе, для привода которого предполагается использовать частотный преобразователь. При выборе насоса предполагается, что его рабочая точка будет соответствовать максимальному значению к. п. д.
Программно-аппаратный комплекс для управления.
Комплекс по управлению состоит из аппаратной и программной части. Аппаратная часть представлена в виде привода и датчиков. Управление и анализ данных производит ЭВМ –центральный контроллер, в ее задачи входит анализ и управление насосными станциями.
В качестве привода используется частотный преобразователь, от которого происходит питание насосного агрегата. В качестве модели управление используется векторное управление, то есть поддержание постоянного значения между частотой и напряжение, это метод считает эффективным для вентиляторных нагрузок и прост в реализации. Задание на частоту привод получает от центрального контроллера.
Датчики представлены в виде датчиков давление, в каждом павильоне устанавливается два датчика, один отслеживает уровень в скважине, другой на уровне земли давление в напорной части. На выходе из каждой станции устанавливается расходомер, все эти приборы в режиме реального времени передают данные на центральный контроллер. Так же при наличии приемного резервуара производится анализ уровня в нем.
Все алгоритмические функции можно разбить на две группы — это функции управления и функции анализа.
Функции анализа предназначены для получения эмпирических данных, которые впоследствии будут использоваться для выбора оптимальных параметров управления. Анализ включает два основные процедуры. Первая -это оценка статического уровня в каждой буровой, для этого исследования, выводится из работы группы скважин, они сначала опорожняются полностью до уровня H0, а потом система анализирует скорость наполнения, на основании этих данных строится зависимость между уровнем и дебетом скважины в силу того, что дебет зависит от множества факторов, процедуру нужно проводит периодически, на рисунке 1 представлена типичная кривая заполнения скважины. Для снижения затрат энергии на подъем воды, очевидно, что необходимо поддерживать максимально возможный уровень в резервуаре, а для упрощения регулирования избегать высокой скорости изменения уровня, в идеале уровень стабилен при стабильном суммарном отборе.
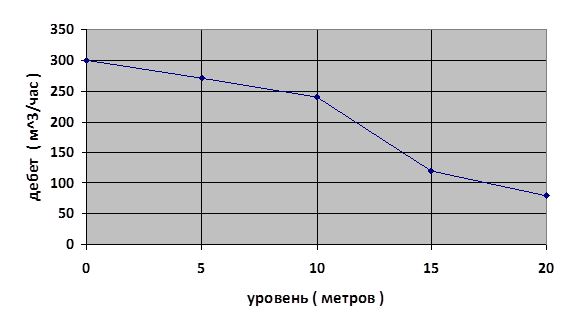
Рис. 1
Кроме данных о скорости заполнения скважины, комплексе так же должен получить данных о насосе и его характеристиках. Первое, что необходимо оценить это гидравлическую кривую. Гидравлическая кривая — это функция, ставящая в соответствие два множества, множество значений давления и значений расхода насоса. Для ее получения необходимо провести испытания, либо использовать представленную производителем. Так же необходимо поставить в соответствие расходу к. п.д. полезно действия насоса. Построив множество гидравлических кривых для разных частот вращения, мы получим вот такой график, см. рисунок 2. [2]
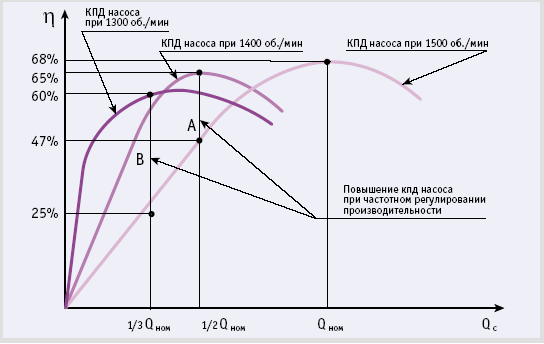
Рис. 2
Как видно из графика, уменьшение частоты смещает точку максимального к. п.д. в сторону меньшего расхода.
Алгоритм управления насосными станциями.
В качестве источника задания предполагается использовать уровень в приемном резервуаре, резервуаре, куда перекачивают воду станции первого подъема. Алгоритм работы предполагается следующий: анализирует скорость изменения уровня в приемном резервуаре, на основании это рассчитывается разница между фактической подачей и необходимой, если подачу необходимо уменьшить, то насосы с самым большим удельным расходом снижает подачу, в том случаи когда подача недостаточна и уровень в резервуаре падает, повышается подача насос с минимальным удельным расходом, управление происходит ПИД-регуляторм, такой алгоритм работы позволит снизить расход электроэнергии на подъем воды, к сожалению, сложность модели не позволяет методом моделирования в приемлемом диапазоне оценить эффективность предложенного способа управления. Одна внедрение в любом случаи приведет к снижению расходов электроэнергии на транспортировку воды.
Заключение.
В заключение хотело бы отметить, что подобные системы внедряются уже достаточно давно, одна с предложено выше системой они имеют одно, но ключевое различие, это различие заключается в том, что комплекс должен сам считывать параметры оборудования и все данные он получает эмпирическим путем, причем сам в автономном режиме. В дальнейшем его развитие должно быть с дополнением его системой искусственного интеллекта, которая позволит не только оптимизировать работы все сети, но и анализировать техническое состояние оборудования его выработку состояние водоносных слоев и много других параметров
Литература:
1. Вода-да, бурение скважин. URL http://www.voda-da.ru/skva.htm.(дата обращения 30.05.2015).
2. Теоретические аспекты эффективности внедрения систем с частотно-регулируемыми приводами. Сахарнов Ю. В., заместитель председателя ФЭК России, д.э.н. URL http://stepmotor.ru/aspecti/ (дата обращения 30.05.2015).
3. Теоретические основы гидравлики. URL http://www.grossen.ru/upload/file/osnovy_gidravliki.pdf
