




UWB — это высокая скорость передачи данных, высокая производительность, низкая стоимость, низкое энергопотребление, но также и ряд ограничений при использовании несинусоидальных импульсных сигналов для передачи высокоскоростного потока данных. Принимая во внимание характеристики UWB, предлагаются адаптивные алгоритмы захвата синхронизации, которые преодолевают недостатки канала с многолучевым распространением, достигают более быстрого захвата сигнала синхронизации и доступа к информации синхронизации.
Ключевые слова:UWB; адаптивный; синхронный захват
Введение
UWB (англ. Ultra-Wide Band, сверхширокая полоса) является беспроводной технологией связи, которая использует несинусоидальные короткие импульсы для передачи данных [1] [2] [3]. UWB, будучи цифровой системой радиосвязи, должна отвечать требованиям цифровой связи, то есть, обеспечивать согласованность в процессе приема частоты и фазы сигнала. При использовании сверхширокополосных импульсных радиосигналов IR-UWB (Impulse Radio Ultra Wide Bend), синхронизация — потенциально «узкое место» и, особенно, для системной производительности в системах асинхронной пакетной коммутацией по двум причинам. Во-первых, принимаемая мощность сигнала низка, что вынуждает систему захвата использовать большое время его накопления с целью принятия статистически достоверного решения о захвате сигнала. Во-вторых, чрезвычайно короткие длительности импульсов сигнала приводят к необходимости установления очень высокой временной точности совпадения импульсов принятого сигнала с импульсами опорной последовательности. С учетом того, что сигнал имеет достаточно большую среднюю скважность, необходим просмотр большого количества возможных относительных сдвигов опорной последовательности по отношению к возможному принимаемому во временной области. Поэтому система захвата вынуждена обрабатывать сигналы за длинные периоды времени перед получением надежной оценки окончательного выбора фазы опорной последовательности. Именно время захвата синхронизации в большинстве случаев является определяющим эффективность системы. Также существенные сложности при реализации процесса синхронизации создает многолучевость распространения радиосигнала в условиях наземной радиосвязи. Хотя UWB-сигналы позволяют эффективно разделять копии сигналов с разной задержкой, т. е. пришедших к приемнику различными путями, при поиске сигнала может происходить захват более слабой его копии, что приводит к снижению надежности связи и меньшей достоверности приема по сравнению с возможной [4]. Для того, чтобы частично решить вышеперечисленные проблемы, в данной работе предлагается новый алгоритм адаптивного захвата синхронизации.
Процесс захвата синхронизации
Для поиска и удержания синхронизации, а также определения временных границ информационного бита в приемнике существует схема синхронизации, управляющая временным сдвигом опорной последовательности и подающая напряжение на пороговое устройство в конце информационного бита для проверки превышения напряжением порогового уровня, и, затем, сбрасывающая в ноль напряжение на интеграторе.
Принимаемый сигнал поступает на коррелятор в случайное время, поэтому копия передаваемого сигнала имеет по отношению к сигналу произвольный временной сдвиг. На приемной стороне схема синхронизации меняет величину временного сдвига путем относительного небольшого отклонения частоты опорной последовательности по отношению к частоте принимаемого сигнала. Этот процесс называется поиском синхронизации. Длительность процесса поиска определяется как начальным случайным временным сдвигом между принимаемым и опорным сигналами, так и скоростью изменения управляемой задержки опорного сигнала. В определенный момент времени взаимная задержка становится равной нулю. В этот момент формы принимаемого и опорного сигналов совпадают, на выходе появляется напряжение, пропорциональное их произведению, и начинается накопление энергии сигнала в корреляторе. В конце сигнала на выходе коррелятора накапливается напряжение, пропорциональное суммарной энергии сигнала за время его длительности. Если за время длительности сигнала значение временного сдвига остается равным нулю, то к моменту окончания сигнала напряжение на выходе коррелятора достигнет максимума — так называемого корреляционного пика. С выхода интегратора коррелятора напряжение подается на пороговое устройство, которое выполняет роль устройства, решающего дилемму «был ли принят сигнал или нет». Если значение корреляционного пика превышает установленный порог срабатывания, то считается, что произошел захват синхронизации и переданный сигнал принят. Срабатывание порогового устройства является управляющим сигналом для второго этапа синхронизации — ее удержания. Процесс удержания синхронизации состоит в отключении устройства, быстро изменяющего временной сдвиг, и переключение этого устройства в режим медленного изменения величины задержки в небольших пределах для поиска максимума корреляционной функции, обеспечивающей наилучшее возможное соотношение сигнал-шум, т. е. качество приема.
Как говорилось выше, что именно время захвата синхронизации в большинстве случаев является определяющим эффективность системы, по этому ниже предлагается адаптивный алгоритм захвата синхронизации, применение которого сокращает время обнаружения увеличивая при этом вероятность обнаружения [4].
Адаптивный алгоритм захвата синхронизации
Грубый алгоритм захвата синхронизации. В этой статье описываются адаптивные алгоритмы захвата синхронизации. Далее информация более детальная, принимаемый сигнал записывается как Tp(t) [5], сигналы корреляционной обработки записываются как Tf.
 (1)
(1)
 (2)
(2)
Алгоритм захвата делиться на два типа: грубый и мягкий. Первый выполняет процесс захвата грубо, достаточно быстро выполняет поиск, создает два локальных шаблона сигнала связанных с принимаемым сигналом. После того, как результат сравнения получен, диапазон поиска уменьшается до половины первоначального, и алгоритм продолжает дальше манипулировать локальным сигналом для сужения поиска. В основе грубого захвата синхронизации, с помощью последовательного метода поиска, захватываются многолучевые компоненты, определяется величина диаметра и полярности.
 (3)
(3)
Возведение полученного сигнала в квадрат производится с целью уменьшения эффектов многолучевости в канале из-за некоторой степени полярности. В то же время, для более полного захвата энергии диаметра, текущие алгоритмы не очевидны, сочетание параметров импульсных сигналов UWB и числа импульсных сигналов может рассматриваться в качестве стандартного комбинированного адаптивного опорного сигнала.
 (4)
(4)
 (5)
(5)
Где N — это длина сигнала интегрального количества кадров; 2M-i — это количество импульсов во время интеграции;  — результат предыдущей интеграции нынешнего сигнала обратной связи; τ1 — это постоянная времени.
— результат предыдущей интеграции нынешнего сигнала обратной связи; τ1 — это постоянная времени.
Из уравнений (4) и (5) следует:
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
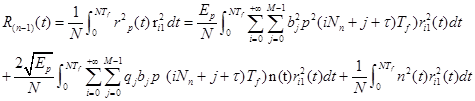
R(n-1)0, R(n-1)1 — это r2i1, r2i2 и r2p(t) после выхода коррелятора, выражается в двух разных частях диапазона полученной энергии сигнала к значению, является i-той степенью итерации относительного положения импульса сигнала.
Реализация грубого алгоритма захвата:
(1) Поиск Tfи определение его значения
R(n-1)0= R(n-1)1 =0, итерации i=0, 
(2) Итерации i=i+1, по формуле (4) и (5). Выводятся формулы (8) и (9), область поиска делится на секции А и В, а затем за счет оценки значения R(n-1)0, R(n-1)1определяется интервал, в котором домен поиска, время поиска может быть уменьшено в два раза;
(3) Если общее число итераций i меньше, чем итераций грубой синхронизации, делается возвращение к шагу (2);
(4) Когда общее число итераций i не меньше, чем итераций грубой синхронизации ic, находиться текущий интервал Х и определяется успешность выполнения грубого захвата синхронизации.
Мягкий алгоритм захвата синхронизации. Когда грубый захват синхронизации завершен, нужно получить искомый интервал Х для выполнения синхронизации, это и является результатом захвата. Из-за многолучевости, грубый захват синхронизации будет искать несколько сигналов синхронизации в этих пределах. Поэтому, нужно добавить параметр синхронизации, чтобы убедиться, что энергия сигнала, полученная из соответствующего канала, выше, чем u. Предполагается, что интервал поиска имеет следующее значение:
 (10)
(10)
D(p) является пороговым значением сигнала при Р. Производится вычисление корреляционной функции между принимаемой смесью сигнала и шума и копией принимаемого сигнала (опорным сигналом). И в случае превышения порогового значения поиск прекращается. После поиска совокупности {pi:D(pi)}, piявляется показателем задержки, а D(pi) — относительным показателем энергии i-канала. Таким образом захватывается энергия самого мощного сигнала в условиях многолучевого канала для последующей его оценки.
После определения уравнений для создания алгоритма захвата, учитывая что измеренные данные могут содержать ошибки, нужно определить, которое из них делает процесс захвата синхронизации более длительным и как это исправить?
Припустим, что Ax=b (11)
(1) Допустим, что сдвиг b — δb, х — δх. Тогда уравнение (11) можно заменить следующим:  (12)
(12)
Тогда исходя из уравнения (11), уравнение (12) можно упростить до следующего:  (13)
(13)
Где Z — длина ||А||z,
 и
и  ,
,  (14)
(14)
(2) Сдвиг А обозначается δА, сдвиг х — δх. Тогда уравнение (11) можно выразить следующим образом:  (15)
(15)
Исходя из уравнения (11), уравнение (15) можно упростить следующим образом:  (16)
(16)
получим  (17)
(17)
Где δА — бесконечно малое значение,  , получим
, получим  (18)
(18)
 является значением А. Формула (13) определяет:
является значением А. Формула (13) определяет:  ; ошибка формулы (18) определяется следующим образом:
; ошибка формулы (18) определяется следующим образом:  . Поэтому значение cond(A) больше и влияние на сдвиг соответственно больше. С этого следует, что значение cond(A) должно быть как можно меньшим. После получения х, ищется значение ошибки r, чем меньше это значение тем выше точность захвата [5].
. Поэтому значение cond(A) больше и влияние на сдвиг соответственно больше. С этого следует, что значение cond(A) должно быть как можно меньшим. После получения х, ищется значение ошибки r, чем меньше это значение тем выше точность захвата [5].
Анализ вероятности обнаружения
Грубый захват синхронизации: формулу (5) в уравнении (8) можно получить следующим образом:
 (19)
(19)
Известная предыдущая итерация для данного сигнала обратной связи является кратной Tf,  (20)
(20)
Формула (5), (20) в (19):
 (21)
(21)
Где l — усиление канала и может быть представлено следующим образом:  (22)
(22)
Более того, формулу (21) можно упростить до следующего вида:  (23)
(23)
 ;
;  ;
;  ;
;  .
.  ровняется p2(t), поэтому
ровняется p2(t), поэтому  . Уравнение можно решить с помощью формулы (19):
. Уравнение можно решить с помощью формулы (19):
 (24)
(24)
Где m(t) является гауссовой случайной величиной. Тогда выходная функция может быть выражена следующим образом:  (25)
(25)
Таким образом можно получить следующее:  (26)
(26)
 (27)
(27)
В процессе грубого захвата синхронизации, предполагая, что число итераций равно n, вероятность того, что сигнал попадает в диапазон после m, следующая:
 (28)
(28)
В процессе мягкого захвата синхронизации, поскольку используется полный поиск, требуется многократное вычисление значения корреляционной функции. При условии, что дано пороговое значение, средняя вероятность обнаружения будет следующей:
 (29)
(29)
Из уравнения (29) видно, что значение вероятности растет с быстрым ростом отношения импульса сигнала к шуму, и с увеличением числа итераций увеличивается вероятность захвата. Но важно отметить, что вероятность захвата в этой работе базируется использовании канала с многолучевым распространением и это требует достаточного количества итераций для предотвращения потери энергии, что может привести к увеличению количества ошибок. Которое может быть уменьшено за счет кодирования источника путем добавления специальных последовательностей битов. Как результат приемник сможет использовать эти специальные последовательности для коррекции ошибок и уменьшения частоты их появления.
Результаты моделирования времени захвата
Грубый захват синхронизации: область поиска от i=0, каждый раз интервал поиска уменьшается до половины значения предыдущего интервала, пока i=Nn, время поиска при грубой захвате синхронизации: Tc=NnMTf, где MTf является интегральным временем.
Мягкий захват синхронизации: с начала поиска области Tc, количество поисков — Nx=Rc/2N-N, время поиска при мягком захвате синхронизации: Tx=NxOTf, где OTfявляется интегральным временем.
 (30)
(30)
Из формулы (30) видно, что общее время захвата Tz связано с Nn, MTf, OTf. В примере М, О введены для улучшения SNR.
 (31)
(31)
Нормированы до того значения, что сдвиг в предсказуемом диапазоне регулирования приведет к минимизации значения ошибки, М=1, О=1, время Tfздесь не рассматривается. Среднее время интегрирования при J, случай когда путь может быть рассчитан:  (32)
(32)
Можно, в то время и при тех условиях, рассчитать среднее время захвата для других известных алгоритмов и провести сравнение результатов.
Среднее время захвата для традиционного линейного алгоритма:  (33)
(33)
Среднее время захвата для алгоритма чередования битов определяет:  (34)
(34)
Среднее время захвата для алгоритма случайного захвата определяет:
 (35)
(35)
Среднее время захвата для алгоритма случайного замещения определяет:  (36)
(36)
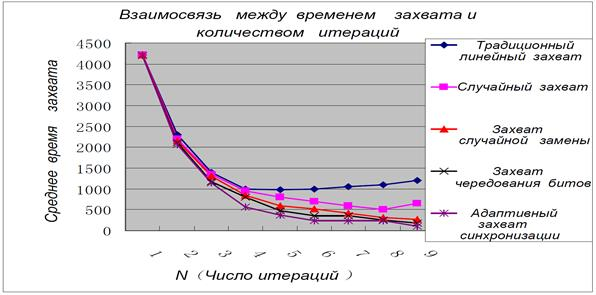
Рис. 1. Взаимосвязь с временем обнаружения
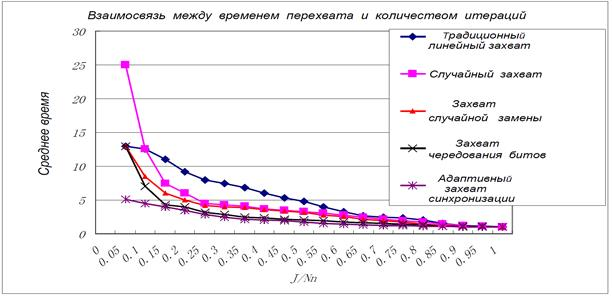
Рис. 2. Зависимость среднего времени от нормированного количества итераций
На Рисунке 1 представлены пять видов различных алгоритмов захвата и зависимость среднего времени захвата от количества итераций. С рисунка видно, что адаптивный алгоритм захвата синхронизации по сравнению с другими четырьмя видами, с возрастанием числа итераций имеет все меньшее среднее время захвата. На рисунке 2 для большей наглядности построена зависимость среднего времени от нормированного количества итераций. С рисунков отчетливо видно, что предложенный адаптивный алгоритм захвата синхронизации имеет большое преимущество по сравнению с другими алгоритмами.
Заключение
Многолучевость, синхронизация UWB — достаточно сложная тема. В данной статье представлен алгоритм адаптивной синхронизации, который преодолевает недостатки канала с многолучевым распространением, способный быстро захватить сигнал и получить необходимую информацию для синхронизации. На данный момент, технологию захвата синхронизации изучали уже много исследователей, но предложенный алгоритм, по сравнению с другими известными алгоритмами, имеет преимущество в среднем времени захвата и оценке канала.
Литература:
1. Jeongwoo Han, Cam Nguyen, A new ultra-wideband.ultra-short monocycle pulse generator with reduced ringing, IEEE Microwave and Wireless Components Letters, Volume: 12, Issue: 6, 2002, pp.10- 20.
2. W. M. Lovelaee, J. K. Townsend, The effects of timing jitter on the Performance of impulse radio [J],IEEE Joumal on Selected Areas in Communications, Volume:20, 2002, pp.9.
3. Z.Tian,G. B. Giannakis.BER, Sensitivity to mistiming correlation based UWB receivers, Proceedings IEEE Globeeom Conference, SanFrancisco, 2003, pp.9- 17.
4. Бунин С. Г., Войтер А. П., Ильченко М. Е., Романюк В. А. Самоорганизующиеся радиосети со сверхширокополосными сигналами. — К.: НПП «Издательство «Наукова думка» НАН Украины». — 2012–444с.: ил.
5. Qinyang Li,Nengchao Wang,Dayi Yi,Numerical Analysis,Publisher: Tsinghua University Press,2008,pp.191–197.
