





В статье рассмотрено применение роботов, способных проводить очистку стеклянных поверхностей в производственных условиях.
Ключевые слова: робот мойщик, система управления, модуль.
Существует две модификации робота для мойки окон, у каждого из них свой принцип. Первая модификация имеет два модуля: один используется для навигации, второй — для чистки. Модули крепятся по обе стороны от стекла и держатся за счет использования постоянных магнитов. Это означает, что даже если у робота сядет аккумуляторная батарея, он не упадет, и будет также же продолжать держаться на окне. Первый модуль — это “мозги” для навигации устройства по поверхности стекла. Он не чистит, только рассчитывает размер стекла, определяет размер окна и определяет маршрут. Для этого он движется в горизонтальном и вертикальном направлении от рамы до рамы и упирается бампером в край окна. Далее робот производит очистку, двигаясь по змейке, то есть движение последовательное, не хаотичное (рис 1).
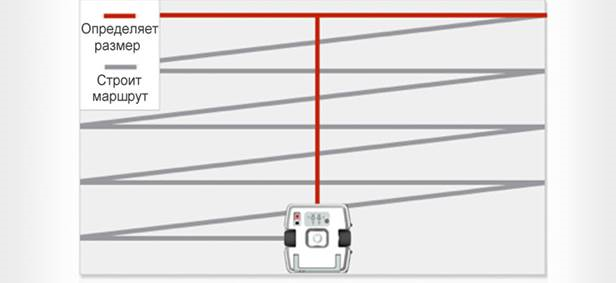
Рис 1. Траектория движения робота.
Второй модуль — чистящий. На нем расположены четыре вращающихся диска, к которым на липучках крепятся подушечки из микрофибры. В центре располагается отверстие для распыления жидкости. Также по краям имеются скребки из ткани для очистки краев. Чистящий модуль не имеет колес для передвижения, он двигается только за счет магнитного поля за навигационным модулем.
Как мы уже говорили, есть и другой робот для мойки окон с вакуумным принципом работы. Принцип его работы немного другой, он имеет только один модуль, который присасывается к стеклу за счет вакуумной присоски. Этот робот также определяет размеры стекла и возвращается на исходную точку после окончания цикла уборки. Только он не моет на самом деле стекло, а протирает его. По сути это полотер для стекла в котором нет даже дозатора моющей жидкости и вращающихся очистительных элементов. Первая же модификация в свою очередь наоборот распыляет жидкость и очищает поверхность с помощью вращающихся салфеток.
Разбираем робота. Откручиваем болты на нижней части модуля и видим мозги, расположенные на основной микросхеме. На ней же располагаются кнопки, питание, ИК-приемник (справа от кнопок). Механические датчики бампера установлены в углах корпуса. Два основных электропривода — по центру. Аккумулятор емкостью 2200 MAh просто лежит на магнитах и держится настолько крепко, что без усилий его не сдвинуть с места. Магнитные диски притягивают все, включая отвинченные болты. Особо откручивать больше нечего, разве что основную плату с корпуса. На схеме ниже указаны обозначения основных элементов конструкции робота (рис 2.)
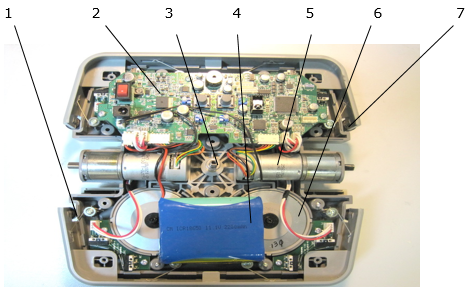
Рис. 2. Основные элементы конструкции: 1 — Сенсор бампера, 2 — Плата, 3 — Регулировка силы притяжения магнитов, 4 — Аккумуляторная батарея, 5 — Электропривод колес, 6 — Магнит, 7 — Пружина бампера
Теперь заглянем внутрь моющего модуля. Рядом с резервуаром для жидкости расположен мини-насос для распыления моющего средства по поверхности стекла. Аккумулятор крепится на клею к корпусу устройства. Черные квадратные модули — электроприводы для магнитов.
Пусть робот представляет собой систему n последовательно соединенных между собой звеньев, положение которых описывается переменными состояния

Робот совершает движение в плоскости x,y, причем его неподвижный конец находится в начале координат. Пусть уравнение D(x,y)=0 задает поверхность препятствия.
Здесь функция D(x,y) дважды дифференцируемая. Пусть также положение схвата определяется точкой 
Тогда поверхность препятствия в пространстве обобщенных координат задается в виде 
Уравнение движения робота представимо в следующей форме:

При наличии кинематической избыточности робота распределение управляющих функций между приводами может оказаться полезными выполнении тех заданий, в которых требуется управлять только состоянием робота, а его силовое воздействие не контролируется. Например, пусть робот с тремя степенями подвижности, который перемещается в плоскости, должен слегка коснуться препятствия, т. е. сила контакта должна быть близка к нулю. Тогда поместить схват в непосредственной близости от препятствия можно за счет быстрого движения первых двух звеньев робота, а медленное движение третьего звена использовать для осуществления контакта с заданной поверхностью. За счет избыточной степени подвижности можно также поддерживать какие-либо заданные характеристики движения робота вдоль внешней поверхности, например постоянный угол между внешней поверхностью и третьем звеном. Кроме того, третье звено можно использовать для компенсации вибраций или шумовых эффектов. Принцип распределения управляющих функций между различными приводами может быть использован в случае, когда управление осуществляется как по состоянию робота, так и по силе схвата. При этом группа приводов реализует управление по силе, а оставшаяся часть приводов — управление по состоянию (рис 3).
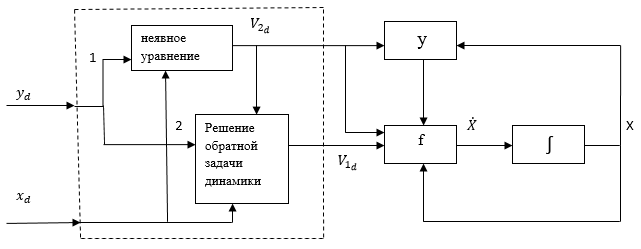
Рис. 3. Блок-схема для решения обратной задачи динамики.
Для обеспечения устойчивого движения относительно заданной траектории  проводится линеаризация уравнений движения вдоль этой траектории. Затем в управление вводится стабилизирующая составляющая, вычисляемая на основе обратной связи по отклонению от заданных положения и скорости робота. В результате система управления, представленная на рис.3, заменяется на систему управления, блок-схема которой содержится на рис.4, где обозначено: 1- блок, выделенный пунктирной линией на рис.3; 2 — приводы; 3 — текущее состояние.
проводится линеаризация уравнений движения вдоль этой траектории. Затем в управление вводится стабилизирующая составляющая, вычисляемая на основе обратной связи по отклонению от заданных положения и скорости робота. В результате система управления, представленная на рис.3, заменяется на систему управления, блок-схема которой содержится на рис.4, где обозначено: 1- блок, выделенный пунктирной линией на рис.3; 2 — приводы; 3 — текущее состояние.
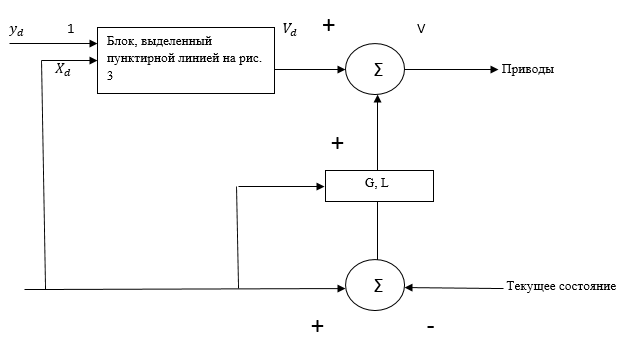
Рис. 4. Замененная система управления.
Заключение:
Робот мойщик окон — очень интересный продукт, который в то же время требует правильных условий эксплуатации. Робот очень хорошо справляется с чисткой окна, оставляя только слабозаметный след по краям. Конечно, робот не является устройством первостепенной необходимости, но при наличии средств поможет безопасно продезинфицировать окна в высотных квартирах, дачах и, главное, на производственных площадях которые занимают очень большие территории.
Литература:
1. Поезжаева Е. В. Промышленные роботы: учеб. пособие в 3 ч. — М.: Изд-во УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009
2. Зенкевич С. Л. Управление роботами — М.: Изд-во МГТУ им Н. Э. Баумана, 2000
