




Использование воздушных восходящих потоков (ВВП) давно известно в сфере планеризма, дельтапланеризма и парапланеризма. Его суть заключается в увеличении продолжительности полета за счет длительного пребывания в поле действия положительной вертикальной скорости восходящего потока. Такое применение энергии окружающей среды возможно и для беспилотных летательных аппаратов (БПЛА). Статья посвящена обзору проводимых по данной тематике научно-исследовательских работ в мире, а также описывает перечень задач, решение которых необходимо для эффективного использования вышеуказанного способа увеличения продолжительности полета БПЛА.
Тенденция развития современной авиации показывает нарастающую роль применения БПЛА как в военной, так и в гражданской сфере. Это объясняется такими преимуществами беспилотной авиации как повышенные маневренные и скоростные характеристики, относительно малая стоимость, малая заметность и отсутствие потерь среди личного состава. Последними тремя достоинствами в полное мере обладают малогабаритные БПЛА, которые имеют еще ряд преимуществ, таких как высокая степень транспортируемости, отсутствие специальных условий для запуска и приземления. Малогабаритные БПЛА способны решать все задачи, которые, так или иначе связаны с наблюдением за чем-либо или с измерением физических, химических, радиационных, метеорологических параметров атмосферы. Как правило, такие аппараты имеют массу до 5 кг, снабжены электродвигателем и имеют продолжительность полета в среднем 1 час и не более 2,5 часов. Малая продолжительность полета является основным недостатком малогабаритных БПЛА. Учитывая, что для решения ряда задач, таких как мониторинг заданной местности, метеорологические исследования и др., при соблюдении определенных условий, не обязательно жестко привязывать маршрут полета к каким-либо конкретным точкам, использование энергии ВВП может способствовать дальнейшему пребыванию БПЛА в воздухе. Таким образом, необходимо определить, какие условия должны быть выполнены для эффективного использования ВВП.
I. Описание воздушных восходящих потоков
В зависимости от причин образования ВВП их можно разделить на две группы: термические и динамические. К динамическим потокам относятся орографические и волновые потоки. Причины образования этих потоков схожи и заключаются в обтекании горизонтальным ветром вертикальных препятствий, однако если высота действия орографических потоков, в основном, определяется высотой препятствия, то волновые потоки могут оказывать свое влияние на больших высотах, которые, по отзывам планеристов, могут достигать 13 км [2,3].
Термические ВВП часто называют термиками. Термик — это всплывающий изолированный объем воздуха, который является формой воплощения термической конвекции [5]. Причиной возникновения и развития термической конвекции является неустойчивая стратификация атмосферы и малая начальная плотность воздуха по сравнению с окружающей средой. Эти два условия могут возникать в силу различных обстоятельств, но, как правило, это происходит из-за неравномерного нагревания различных участков подстилающей поверхности. Неравномерное прогревание обуславливается как особенностями рельефа, так и типом подстилающей поверхности, например, асфальтовое покрытие прогревается солнцем сильнее, чем грунтовая дорога. Малая начальная плотность воздуха также может обуславливаться типом поверхности, например, над озером или пашней, при их прогревании солнечными лучами, будет интенсивно образовываться водяной пар, плотность которого меньше плотности воздуха [1].
По мнению некоторых исследователей, наблюдаются три формы термиков [5]:
1) изолированный термик сферической формы с внутренней циркуляцией в виде вихревых колец, так называемый «пузырь»;
2) вертикальная или наклонная воздушная «струя» или «столб», вертикальный размер которого в 5–10 раз превышает горизонтальный;
3) термик, представляющий собой объединение двух вышеназванных форм, наблюдающийся в виде «султана».
Наиболее исследованными являются вторая и третья форма термиков, но третья, по описаниям, представленным в [1,8,9] чаще встречаются.
II. Парение в термических воздушных восходящих потоках
Описанные выше ВВП давно используются планеристами для увеличения продолжительности и дальности полета. Суть этого использования заключается в том, что попадая в поле действия положительной вертикальной скорости ВВП, планерист начинает маневрировать, пытаясь не выйти за пределы потока. Таким образом, скорость снижения как минимум уменьшается, а при достаточно сильном восходящем течении и эффективном маневрировании — высота полета увеличивается. Таким образом, увеличивается и продолжительность полета, т. к. увеличивается запас по высоте. Увеличение продолжительности полета влечет за собой возможное увеличение дальности полета. Последнее свойство может быть усилено, если маршрут полета пересечет как можно большее число термиков. Такое применение ВВП возможно и для улучшения тактико-технических характеристик малогабаритных БПЛА.
Наиболее продвинутое исследование в этой области было осуществлено в течение последних десяти лет в NASA Dryden Flight Research Center под руководством Майкла Эллана [8]. В вышеуказанном центре была разработана достаточно упрощенная модель термических ВВП, форма которых относится к разряду «султанов».
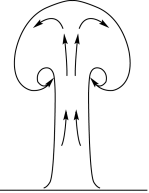
Рис. 1. Термик в форме «султана»
Эта модель была построена на основе метеорологических измерений, проводимых в National Oceanic and Atmospheric Administration Surface Radiation station (Desert Rock, штат Невада) и описывает некоторые параметры термической конвекции в пустынных районах [10]. На основе полученных данных в 2006–2007 году было проведено моделирование полета парящего БПЛА, маневрирующего в ВВП для увеличения продолжительности полета. В результате было установлено, что продолжительность полета БПЛА, за счет использования ВВП может быть увеличена до 14 часов при номинальной продолжительности в 2 часа [10].
В 2008 году в Калифорнии близ города Montague под руководством Даниэля Эвардса были проведены летные испытания, целью которых были исследования метода использования ВВП в полетах БПЛА [11]. Как и в моделировании, проводимом в NASA, полеты проходили над пустынной местностью в летнее время года. Испытания проводились как для дистанционно пилотируемых летательных аппаратов (ДПЛА), так и совершающих автономный полет. При дистанционном управлении активно использовались аудиосистемы, сигнализирующие об увеличении вертикальной скорости, что позволяло вовремя начинать маневрирование, обеспечивающее длительное пребывание в восходящем потоке. Для БПЛА, совершающих автономный полет, была разработана программа распознавания ВВП и маневрирования в них. Она основана на исследованиях, проводимых Элланом в части определения центра ВВП (области с наибольшей вертикальной скоростью воздушного потока), а также на работе других исследователей в части распознавания ВВП и оптимизации параметров полета (таких как воздушная скорость, угол крена и др.) для эффективного парения в ВВП. В результате испытаний было установлено, что те летательные аппараты (ЛА), которые совершали автономный полет и маневрировали в ВВП по заранее построенному алгоритму, дольше удерживались в восходящем течении. Неофициальный рекорд продолжительности полета был установлен в октябре 2008 года и составил 3,5 часа. По окончании испытаний были сформулированы несколько рекомендаций для эффективного использования ВВП в парящих полетах:
1) планировать полет так, чтобы он проходил через максимальное число ВВП;
2) использовать информацию о распределении вертикальной скорости в потоке, что позволяет адаптироваться под поток, контролируя в процессе маневрирования воздушную скорость и угол крена.
Если первый вывод вполне очевиден, то второй можно дополнить некоторыми разъяснениями. Подъемная сила ЛА прямо пропорционально зависит от квадрата воздушной скорости. Радиус разворота также прямо пропорционально зависит от квадрата воздушной скорости и обратно пропорционально от тангенса угла крена. При высокой скорости и малом угле крена радиус разворота может не позволить не выйти за пределы потока. С другой стороны при малой скорости и большом угле крена падает подъемная сила ЛА и даже постоянное пребывание в ВВП может привести к падению вертикальной скорости и уменьшении высоты.
Для каждого летательного аппарата можно заранее определить собственную скорость планирования, которая представляется уравнением [3]:
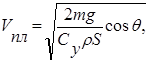 (1)
(1)
где m — масса БПЛА; S — площадь несущей поверхности; Сy — коэффициент подъемной силы; ρ — плотность воздуха; θ — угол тангажа, который определяется из уравнения:
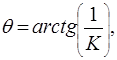 (2)
(2)
где K — аэродинамическое качество БПЛА, которое при небольших скоростях и малых углах атаки остается практически неизменным в процессе полета. Если БПЛА переходит в парящий полет со скоростью, сильно отличающейся от номинальной скорости планирования, то это может привести к длительному переходному процессу до стабилизации скорости, что влечет за собой потерю энергии. Таким образом, выдерживание необходимого отношения воздушной скорости и угла крена при маневрировании в ВВП должно осуществляться только за счет регулирования угла крена.
В Государственном университете аэрокосмического приборостроения (Санкт-Петербург) в 2014 году также проводилось моделирование полета БПЛА с учетом использования воздушных восходящих потоков. Моделирование основывалось на полученных в [10] данных о параметрах термической конвекции. Исходя из соотношений, приведенных в [10] можно установить, что для постоянного пребывания в поле действия положительной вертикальной скорости ВВП необходимо выдерживать следующее отношение воздушной скорости и угла крена:
 , (3)
, (3)
где Vвозд — истинная воздушная скорость, γ — угол крена, Н — высота сечения, а Hi — высота конденсации облаков (ВКО) (которая может быть получена перед полетом из метеосводки). Справедливость данного отношения была подтверждена в результате моделирования:
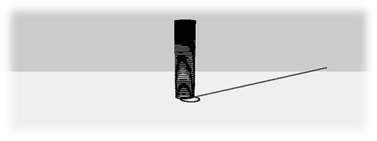
Рис. 2. Моделирование полета БПЛА при использовании термиков для набора высоты.
На прямолинейном участке проходило равномерное снижение планера до входа в ВВП, после чего был совершен маневр для постоянного пребывания в потоке.
Для моделирования были использованы массогабаритные характеристики одной радиоуправляемой модели, подходящей для парения в термиках. Принималась следующая математическая модель движения БПЛА:
 (4)
(4)
где  - сила лобового сопротивления,
- сила лобового сопротивления,  - подъемная сила, m — масса БПЛА, S — площадь несущей поверхности, V — истинная воздушная скорость; T — сила тяги (T = 0), D — сила сопротивления воздуха; L — подъемная сила, X и Y — координаты БПЛА в прямоугольной системе координат, H — истинная высота полета БПЛА, Сy — коэффициент подъемной силы, Сx — коэффициент лобового сопротивления, ρ — плотность воздуха, Ψ — угол курса, γ — угол крена, θ — угол тангажа, Wxy — скорость горизонтального ветра.
- подъемная сила, m — масса БПЛА, S — площадь несущей поверхности, V — истинная воздушная скорость; T — сила тяги (T = 0), D — сила сопротивления воздуха; L — подъемная сила, X и Y — координаты БПЛА в прямоугольной системе координат, H — истинная высота полета БПЛА, Сy — коэффициент подъемной силы, Сx — коэффициент лобового сопротивления, ρ — плотность воздуха, Ψ — угол курса, γ — угол крена, θ — угол тангажа, Wxy — скорость горизонтального ветра.
Скорость ветра принималась равной нулю. Тяга также принималась нулевой, т. к. моделировался парящий полет с выключенным двигателем. В случае если восходящий поток был распознан БПЛА (распознавание осуществлялось по регистрации увеличения вертикального ускорения), то при выдерживании оптимального отношения воздушной скорости и угла крена, БПЛА начинает парить в ВВП в течение всего времени его существования. Так как в первой серии экспериментов продолжительность существования принималась неограниченной, то при попадании в термик, как видно на рисунке 2, БПЛА уже не выходил за его пределы.
Очевидно, что каждый ВВП существует какое-то определенное время. Считается, что продолжительность существования термика находится в диапазоне от нескольких до 20 минут [5]. Кроме того, следует учитывать — какое количество ВВП приходится на единичный участок площади. Согласно проведенным исследованиям ВВП с помощью планеров установлено, что в летнее время года в среднем на 1 км2, приходится около 3–4 крупных термиков диаметром не менее 100 м. Вертикальная скорость в потоке зависит от высоты на которой рассматривается движение воздуха, от текущей ВКО и от некоторых других параметров, характерных для той или иной местности. Деятельность тепловых конвективных потоков приводит к образованию конвективных облаков. К этому типу относятся кучевые и кучево-дождевые облака, для которых характерна ВКО облаков от 800 м до 1500 м. Под ними чаще всего образуются термики.
Было проведено 3 серии моделирования полетов на квадратном участке площадью 12 км2 с ВКО 800 м, 1100 м и 1400 м соответственно. На этом участке было размещено 532 термика таким образом, чтобы их центральные оси располагались не ближе 200 м друг от друга. Запуск БПЛА производился из центра участка с различной начальной высоты. В каждой серии было проведено по 100 запусков с высоты от 100 м до ВКО с интервалом 100 м. На следующем рисунке представлена зависимость продолжительности парящего полета БПЛА от высоты запуска при различных ВКО:
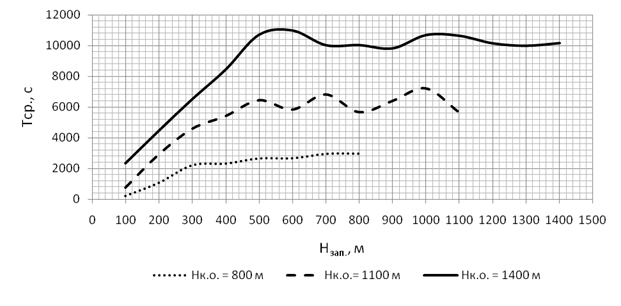
Рис. 3. Зависимость продолжительности парящего полета БПЛА от высоты запуска при различных ВКО
На рисунке 3 видно, что продолжительность полета зависит и от высоты с которой БПЛА переходит в парящий полет и от ВКО. При этом можно констатировать, что начиная с некоторой высоты запуска БПЛА среднее время парящего полета будет приблизительно одинаковым. Таким образом, не имеет смысла выводить БПЛА на слишком большие высоты, для перехода в парящий полет.
Рассмотрим один из промоделированных полетов с заданной ВКО равной 1100 м и высотой запуска 500 м.
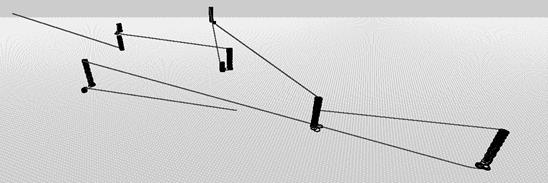
Рис. 4. Траектория движения БПЛА
Как видно на рисунке 4, БПЛА, попадая в поток, осуществлял центрирование в нем и парил в нем до окончания существования потока. Парящий полет продолжался 6734 секунды. Рассмотрим график изменения высоты полета со временем:
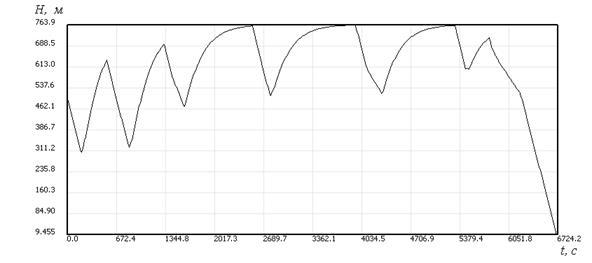
Рис. 5. График изменения высоты БПЛА в процессе парящего полета
На рисунке 5 видно, что при попадании в ВВП, высота полета БПЛА увеличивалась до окончания существования потока. При этом интересно отметить, что высота увеличивалась нелинейно и, доходя до некоторого значения, практически прекращала расти даже в период активности термика. Это объясняется тем, что вертикальная скорость в потоке, как было сказано ранее, зависит от высоты и с ее ростом сначала увеличивается, затем уменьшается. Таким образом, восхождение БПЛА в потоке происходит до тех пор, пока векторная сумма собственной скорости снижения БПЛА и вертикальной скорости восходящего потока не станет близка к нулю.
III. Распознавание воздушных восходящих потоков
Различные типы ВВП отличаются по своей форме и структуре. Следовательно, могут отличаться и тактики парения в этих потоках. Например, в термических восходящих потоках принято парить по спирали, в то время как в орографических потоках — восьмеркой. От этого зависит эффективность парения и то, как долго продержится БПЛА в потоке.
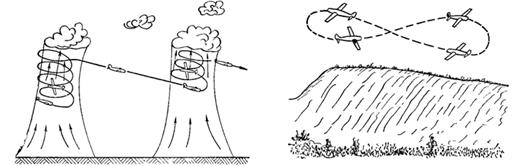
Рис. 6. Парение ЛА в термиках по спирали и в орографических потоках — восьмеркой [6]
ВВП, вызванные тепловой конвекцией в атмосфере также могут образовываться при различных обстоятельствах. Классическим вариантом образования является неравномерный прогрев подстилающей поверхности, но некоторые ВВП, образуются в результате протекания сложных атмосферных процессов и могут являться причиной образования дождевых и грозовых облаков. В этом случае речь идет о предгрозовой или преддождевой конвекции. Попадание БПЛА в такие потоки черева-то опасными последствиями, так как они сопровождаются сильной турбулентностью, что может привести к разрушению ЛА.
Таким образом, само по себе обнаружение ВВП не достаточно для эффективного их использования, следовательно, актуальной является задача классификации ВВП в процессе полета, с целью распознавания тех потоков, которые пригодны для длительного парения в них. От точности распознавания зависит как продолжительность, так и безопасность полета. Если ранее для обнаружения ВВП использовался, как правило, единственный классификационный признак — изменение вертикальной скорости БПЛА, то для классификации требуется использование большего числа признаков, которое позволит отличать друг от друга разные типы ВВП.
В настоящее время разработаны математические модели, описывающие физические процессы, проходящие в некоторых ВВП, в основном, вызванные термической конвекцией. На ее основе могут быть разработаны методы распознавания ВВП, использующие в качестве классификационных признаков физические параметры окружающей среды, измерение которых может осуществляться с помощью датчиков, установленных на борту БПЛА.
Состояние облачности также может дать информацию о наличии и типе ВВП в том или ином местоположении. Наличие кучевого облака над ВВП, как правило, означает, что такой поток пригоден для длительного парения, а наличие грозовых туч дает повод для немедленной передислокации.
Использование информации о типе подстилающей поверхности и рельефе местности также может послужить для различия ВВП, вызванные динамической и термической конвекцией.
Самое точное распознавание ВВП возможно осуществить с помощью оборудования, используемого для метеорологических исследований. Самым характерным примером являются активные оптические системы, которые также называют лидарами. С их помощью можно измерить температуру воздуха в локальных зонах. По разности температур можно судить о наличие или отсутствие термика в той или иной зоне.
IV. Планирование полета
Как отмечалось ранее, важным условием эффективности полета является его планирование так, чтобы БПЛА пересекал максимально возможное количество ВВП. Для этого необходимо использовать априорную информацию об их возможном местонахождении. При планировании полета также необходимо учитывать изначальную задачу, выполняемую БПЛА в полете. В зависимости от этого определяется, на какое расстояние допускается отклониться БПЛА от первоначального маршрута и с учетом информации о возможном местонахождении ВВП маршрут перестраивается, устанавливаются коридоры и эшелоны, в которых возможен полет БПЛА. Источников этой информации не так много и их количество зависит от региона, для которого разрабатывается план полета.
Для тех регионов, где активно развит планеризм, можно найти карты, на которых нанесены траектории множества парящих полетов. На основе обработки этих данных, установлены зоны, где наиболее вероятно появление ВВП в зависимости от времени суток и времени года. Кроме того, могут быть найдены конкретные координаты образования мощных ВВП, когда-либо использованных планеристами в своих полетах.
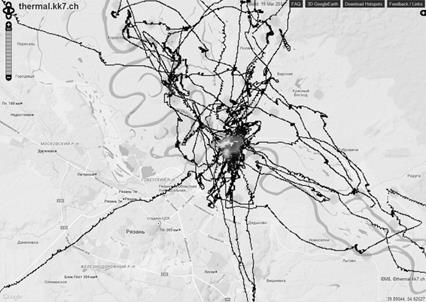
Рис. 7. Трассы полетов и зоны возможного образования термиков [12]
Карты термиков также можно построить на основе знаний о рельефе местности и типе подстилающей поверхности. Зная карту рельефа и положение Солнца относительно горизонта можно оценить, какой участок поверхности окажется в тени, а какой будет более интенсивно прогреваться на Солнце. Учитывая тип подстилающей поверхности и ее способность нагревать воздух вблизи себя, можно оценить в каких зонах появление термиков более или менее вероятно.
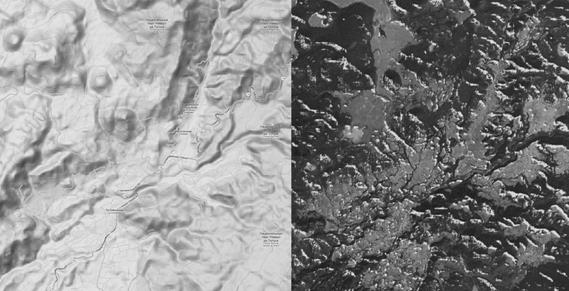
Рис. 8. Карты рельефа местности и наиболее интенсивного прогрева поверхности [13]
V. Заключение
Были рассмотрены некоторые результаты исследований по проблеме увеличения продолжительности полета малогабаритных БПЛА. Возможность использования ВВП для увеличения продолжительности полета была подтверждена при моделировании полета БПЛА, с учетом воздействия на него ВВП и практически доказана при летных испытаниях групп БПЛА, совершающих автономный полет. В рамках проведенных исследований было установлено, что для эффективного использования энергии окружающей среды БПЛА необходимо решать ряд дополнительных задач, которые можно условно разлить по трем направлениям:
- планирование полета БПЛА с учетом возможного местонахождения ВВП;
- распознавание ВВП, пригодных для длительного парения;
- маневрирование в ВВП по определенным алгоритмам, а также выдерживание оптимальных летных параметров с целью увеличения продолжительности пребывания в поле действия мощного восходящего потока.
Эффективное использование ВВП возможно только при решении всего комплекса дополнительных задач, для каждой из которых требуется разработать свои методы решения. Их разработка должна основываться на знаниях о физической природе ВВП и опыте, накопленном в планеризме при обработке этих потоков.
Литература:
1. Бурхард М., Книга Термиков. Учебник по маршрутным полетам, Издательство: Брянск ISBN: 3–00–015761–1., 2006. 199 с.
2. Воронцов П. А. Турбулентность и вертикальные токи в пограничном слое атмосферы, Главная геофизическая обсерватория им. А. И. Воейкова. Л., Гидрометеоиздат, 1966. 296 с.
3. Двоеносов Д., Замятин В., Снешко Ю. Нагрузки, действующие на планер в полете М. Изд-во ДОСААФ 1963. 138 с.
4. Довгалюк Ю. А., Веремей Н. Е. и др. Концепция разработки трехмерной модели осадкообразующего конвективного облака // Труды главной геофизической обсерватории им. А. И. Воейкова. 2008. № 558. С. 102–142.
5. Довгалюк Ю. А. Ивлев Л. С., Физика атмосферных аэрозольных систем. СПб: Изд-во СПбГУ, 1999. 188 с.
6. Руденский, Е. Г. Полет на планере. Пособие для планеристов/ Е. Г. Руденский. — М.: Изд-во ДОСААФ, 1977. — 72 с.
7. Чернов Ю. В. Исследование восходящих потоков с помощью планеров. –Тр. ЦАО, 1965, вып. 63.
8. Allen M. J., Autonomous soaring for improved endurance of a small uninhabited air vehicle // AIAA 2005–1025, 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 10–13 January, 2005.
9. Allen, M. «Guidance and Control of an Autonomous Soaring UAV», NASA TM-214611, 2007, p. 31.
10. Allen M. J., Updraft model for development of autonomous soaring uninhabited air vehicles // AIAA 2006–1510, 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 9–12 January, 2006.
11. Daniel J. Edwards and Larry M. Silberberg. «Autonomous Soaring: The Montague Cross-Country Challenge», Journal of Aircraft, Vol. 47, No. 5 (2010), pp. 1763–1769.
12. PARAGLIDING THERMAL MAPS — kk7. http://thermal.kk7.ch/
13. THERMAL FINDER — Software for Paragliding. http://thermocompass.nethouse.me/photoalbums/9769
